

Разработки к лабам / ТАУ (лабник - Тарасова, Топильская) / Tarasova
.pdfМинистерство образования Российской Федерации Московский государственный институт электронной техники (Технический университет)
Г.И.Тарасова, Т.А.Топильская
Анализ и синтез САУ с помощью программных средств на IВМ РС
Лабораторный практикум по курсу ″Теория автоматического управления″
Утверждено редакционно-издательским советом института в качестве методических указаний
Москва 2001
УДК 681.5.01(07)
Рецензент канд. техн. наук, доц. В.В.Ануфриенко
Тарасова Г.И., Топильская Т.А.
Анализ и синтез САУ с помощью программных средств на IВМ РС. Лабораторный практикум по курсу ″Теория автоматического управления″. - М.: МИЭТ, 2001. - 52 с.: ил.
Лабораторный практикум содержит описание и методику проведения лабораторных работ по анализу и синтезу систем автоматического управления (САУ) с помощью персонального компьютера (ПК) типа IВМ РС. Лабораторные работы основаны на использовании программных пакетов МОДОС и КАЛИСТО, разработанных на кафедре вычислительной техники Московского энергетического института.
Предназначен для студентов факультета электронных технологий, материалов и оборудования, изучающих курсы ″Теория автоматического управления″, ″Основы автоматики″, ″Идентификация динамических систем″, а также для студентов других факультетов МИЭТ, изучающих курсы ″Основы автоматического управления″, ″Автоматизация производственных процессов″ и др.
© МИЭТ, 2001
2
Лабораторная работа № 9. Исследование переходных процессов САУ с помощью программного пакета МОДОС
Цель работы: изучение машинного анализа качества систем автоматического управления (САУ) с использованием частотных критериев качества на этапе подготовки исходного задания на ПК.
Продолжительность работы - 4 часа.
Теоретическая часть
Качество САУ. Косвенные критерии качества
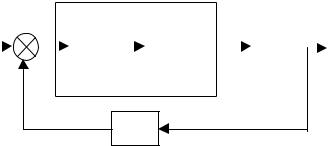
Cтруктурная схема линейной системы автоматического управления представлена на рис.1.
В схему входят следующие элементы:
РУ - |
регулирующее устройство; |
ИУ - |
исполнительное устройство; |
ОУ - |
объект управления; |
Д - |
датчик выходного сигнала; |
СС - |
схема сравнения. |
|
|
CCε(t) |
УУ |
|
|
|
|
|
|
y(t) |
|||
g(t) |
РУ |
|
|
ИУ |
u(t) |
ОУ |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
_ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
y'(t) |
|
|
|
|
|
|
|
|
||||
Д
Рис.1.
3
На рис.1 обозначены: g(t) - задающее воздействие; ε(t) = g(t) – y′(t) - ошибка системы управления; u(t) - управляющее воздействие; y(t) - управляемая величина; y′(t) - измеренное значение управляемойвеличины.
Обычно при определении качества простейших САУ параметры объекта считаются известными и неизменными, а необходимое качество управления достигается изменением параметров регулирующего устройства. Закон преобразования ошибки САУ в управляющее воздействие называют законом регулирования или алгоритмом управления.
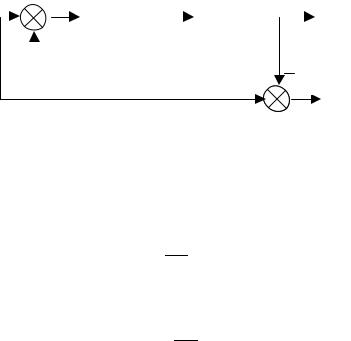
Объединение регулирующего и исполнительного устройств в устройство управления (УУ) в предположении, что датчик идеален (y′(t) = y(t)), дает структурную схему, показанную на рис.2.
g(t) |
|
|
ε(t) |
|
|
u(t) |
|
|
y(t) |
||||
УУ |
ОУ |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
WУ(p) |
|
|
W0(p) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ε(t)
Рис.2.
В качестве регулирующих устройств наиболее часто используются следующие классические линейные регуляторы:
- пропорциональный (П)
Wу(p) = kп
(где kп - коэффициент пропорциональности); - интегральный (И)
Wу( p) = T1p
и
(где Ти - постоянная времени интегрирования); - пропорционально-интегральный (ПИ)
Wу( p) = kп + Tи1p .
4

При исследовании САУ необходимо решать задачу обеспечения требуемых показателей качества.
Косновным показателям качества САУ относятся:
1)установившаяся ошибка:
εуст = ε(∞) = g(t) – yуст(t) = 1 – h(∞);
2)перерегулирование:
σ= ymax − ууст 100% = hmax − hуст 100%;
ууст hуст
3) время регулирования tp, т.е. время, в течение которого отклонение регулируемой координаты достигает величины, не превышающей заданного допустимого значения εдоп;
4) максимальное отклонение hmax (максимальный выброс) регулируемой координаты y(t);
5) количество колебаний n регулируемой координаты за время регулирования tp.
Эти параметры определяются по кривой переходного процесса
(рис.3).
Методы непосредственного построения (или оценки) переходного процесса относят к прямым методам исследования качества САУ.
На первых этапах разработки и исследования САУ широко используют косвенные методы оценки качества, которые дают возможность установить связь между параметрами системы и показателями качества без построения кривой переходного процесса.
5
Наиболее распространенными косвенными методами являются частотные методы.
Основные достоинства частотных методов - возможность использования не только расчетных, но и экспериментальных характеристик разомкнутой системы для определения качества замкнутой САУ, а также простота и наглядность влияния изменений структуры и параметров системы на изменения характеристик качества.
Частотные методы позволяют определить такие показатели качества, как время переходного процесса, полоса пропускания, колебательность, запасы устойчивости, т.е. характеристики динамики процесса, которая определяется среднечастотной областью. Обычно САУ строится таким образом, чтобы выбранное решение являлось оптимальным с точки зрения существующих конкретных условий и требований к габаритам, весу, простоте, надежности и т.п. и обеспечивало выполнение требований к качеству САУ.
Требования к точности системы
В зависимости от величины установившейся ошибки САУ делятся на статические и астатические.
Система называется статической по отношению к управляющему (возмущающему) воздействию, если при воздействии, стремящемся с течением времени к некоторому установившемуся постоянному значению, ошибка также стремится к постоянному значению, зависящему от величины воздействия.
Система называется астатической по отношению к управляющему (возмущающему) воздействию, если при воздействии, стремящемся с течением времени к некоторому установившемуся постоянному значению, ошибка стремится к нулю вне зависимости от величины воздействия.
Одна и та же система может быть статической по отношению к какому-либо возмущающему воздействию и астатической по отношению к управляющему воздействию, и наоборот.
Для того, чтобы система была астатической, необходимо наличие в замкнутом контуре структурной схемы САУ интегрирующего звена:
W(p) = k/p.
В общем виде передаточная функция разомкнутой системы обычно записывается следующим образом:
6
W ( p) = kν W0 ( p), p
где ν - порядок астатизма САУ.
Известно, что при управляющем воздействии, имеющем вид
µ
g(t) = A tµ! ,
установившаяся ошибка равна [1]:
εуст = 0 |
при |
ν > µ; |
|||
εуст = |
A |
при |
ν = µ = 0; |
||
1 + k |
|||||
|
A |
|
|
(1) |
|
εуст = |
при |
ν = µ ≠ 0; |
|||
k |
|||||
|
при |
|
|||
εуст → ∞ |
ν < µ. |
||||
Таким образом, ошибка САУ в установившемся режиме зависит: а) от параметров входного сигнала А и µ; б) порядка астатизма САУ ν;
в) величины коэффициента усиления k.
Чем больше коэффициент усиления, тем меньше ошибка. Однако величина коэффициента усиления может быть ограничена устойчивостью САУ.
Рассмотрим частные случаи входных воздействий.
1. Если входной сигнал имеет вид g(t) = A 1(t), а установившаяся
ошибка |
не |
должна |
превышать заданной величины |
ε1, то: |
|||||||
при ν > |
0 |
εуст |
= |
|
0 |
|
- требование выполнимо при |
любом k; |
|||
при ν = 0 |
|
ε |
уст |
= |
|
A |
|
< ε - требование выполнимо при |
k > |
A |
. |
|
k +1 |
|
|||||||||
|
|
|
|
1 |
|
ε |
|||||
|
|
|
|
|
|
|
|
|
1 |
|
|
Частотная характеристика системы может быть описана выражением
W (jω) = k W0 (jω);
логарифмическая амплитудно-частотная характеристика (ЛАЧХ) -
L(ω) = 20 lg W(jω) = 20 lgk + 20 lgW0(jω) ≥ 20 lg εA +20 lg W0(jω) .
1
7
Так как 20 lg W0(jω) = 0 при ω = 0, то L(ω) ≥ 20 lg |
A |
. |
|
||
|
ε |
|
|
1 |
|
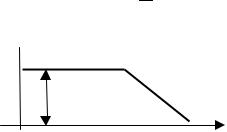
Следовательно, ЛАЧХ в области низких частот имеет нулевой
наклон и проходит выше значения 20 lg A (рис.4).
ε1
L(ω) 
20lg(A/ε1)
lg(ω)
Рис.4.
2. Если g(t) = A·t и εуст ≤ ε2 , то САУ должна быть астатической не ниже первого порядка. При ν = 0 εуст → ∞ - требование точности не
выполнимо; при ν > 1 εуст = 0 - требование выполняется при любом k;
при ν = 1 передаточная функция имеет вид: W ( p) = |
k |
W |
|
( p) . Согласно |
||||||||
|
0 |
|||||||||||
|
|
|
|
|
|
|
|
|
p |
|
||
выражению (1) |
|
A |
|
|
|
A |
|
|
|
|
|
|
|
εуст = |
и |
k ≥ |
, |
|
|
|
(2) |
||||
|
k |
|
|
|
|
|||||||
|
|
k |
|
|
ε2 |
|
|
|
|
|||
тогда |
20lg W(jω) = 20lg |
|
+ 20lg W0(jω) , |
|
|
|||||||
|
jω |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||
и ЛАЧХ имеет вид, показанный на рис.5.
8

L(ω) |
|
L(ω) |
|
–20 дБ/дек |
|
–20 дБ/дек |
|
|
|
|
|
20lgk |
|
–40 |
|
|
|
ω=k≥A/ε |
|
|
ω=k≥A/ε |
|
|
|
|
|
|
ω=1 |
lg(ω) |
–20 |
lg(ω) |
|
|
|
|
|
а) |
|
|
|
Рис.5. |
|
|
б) |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3. Если входной сигнал нарастает с постоянным ускорением |
|||||||||||||||
|
|
g(t) = A |
|
t |
2 |
и εуст ≤ ε3 , то САУ должна быть астатической не |
|||||||||||
|
|
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
вид: W(p) = |
||||||
ниже второго порядка. Передаточная |
функция |
имеет |
|||||||||||||||
|
k |
W0 ( p) . Согласно |
выражению (1) |
εуст = |
A |
|
и |
k ≥ |
A |
, |
|||||||
|
p 2 |
k |
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
ε3 |
||||
следовательно, ЛАЧХ имеет вид, показанный на рис.6. |
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
Рис.6. |
|
|
g(t) = |
gmax |
sinωkt и |
||||
|
|
4. Если входной |
сигнал - гармонический |
||||||||||||||
|
|
L(ω) |
|
|
|
|
3 дБ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
–40 дБ/дек |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ω = k ≥ |
A |
lg(ω) |
|
|
|
1 |
ε3 |
|
|
|
требуется, чтобы амплитуда ошибки была не больше ε4, то рассуждения
9

такие же, как в случаях 1 - 3, только рассматривается конкретная частота ωk.
При гармоническом входном воздействии ошибка тоже будет гармонической:
ε(t) = εmax sin(ωkt + ϕ).
Амплитуда ошибки εmax может быть определена из выражения
εmax =| ε( jωk ) |=| |
|
|
1 |
| | g( jωk ) |= |
gmax |
≤ ε4 . |
|
1 |
+W ( jωk ) |
|1 +W ( jωk ) | |
|||||
|
|
|
|||||
В реальных системах εmax<< gmax, поэтому W(jωk) >> 1, и выражение для амплитуды ошибки запишется следующим образом:
εmax ≈ |
gmax |
≤ ε4 , |
|
| W ( jωk ) | |
|||
|
|
т.е. для того, чтобы гармоническое входное воздействие воспроизводилось с ошибкой не более ε4, ЛАЧХ системы должна проходить не ниже контрольной точки Ak (рис.7) с координатами ω =
ωk; L(ω) = =20lg|W(jωk)| = 20lg(gmax/ε4).
L(ω) |
3 дБ |
Ak
20lg(gmax/ε4)
ωk lg(ω)
Рис.7.
10