

Курсовые / Dexter's / Мой (вариант 13) / сау
.docМИНИСТЕРСТВО ОБРАЗОВАНИЯ РФ
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНСТИТУТ
ЭЛЕКТРОННОЙ ТЕХНИКИ
(Технический университет)
Курсовой проект по курсу
“Теория автоматического управления”
Тема: “Синтез цифровой системы управления”
|
Руководитель работы:
Таран В.А. |
Выполнил студент гр. ЭТМО – 31 Карсаков В. |
Москва 2003г.
Содержание
Составление структурной схемы объекта управления 3
Определение передаточной функции объекта управления 5
Построение логарифмических и переходной характеристик объекта 6
Составление уравнения состояния непрерывного объекта 9
Определение периода квантования управляющей ЦВМ 9
Составление уравнений состояния дискретной модели объекта 9
Расчет параметров цифрового регулятора состояния, обеспечивающего торможение двигателя за минимальное число тактов квантования 10
Расчет параметров оптимального быстродействия наблюдателя состояния и составление его структурной схемы 11
Запись уравнений состояния замкнутой цифровой системы и составление её структурной схемы 12
Расчет и построение графиков сигналов в цифровой системе с наблюдателем и регулятором состояния 15
Литература 18
Составление структурной схемы объекта управления
Исходные данные:
|
Номер варианта |
13 |
|
Модель |
ДПМ-11 |
|
Мощность, Вт |
|
|
Напряжение, В |
12 |
|
Ток, А |
0.13 |
|
Скорость вращения, об/мин |
9000 |
|
Вращающий момент, Нсм |
0.15 |
|
Момент инерции, кг/см2 |
0.003 |
|
Сопротивление, Ом |
10 |
|
Индуктивность, Гн |
|
Объект управления – электрический привод с двигателем постоянного тока, описываемый уравнениями:
-
уравнение электрической цепи двигателя
![]() ;
;
-
уравнение моментов
![]() ;
;
-
уравнение редуктора
![]() ;
;
где: u – напряжение на якоре двигателя [В];
i – ток якоря [А];
![]() - э.д.с. вращения
[В];
- э.д.с. вращения
[В];
![]() – момент, развиваемый
двигателем [Нм];
– момент, развиваемый
двигателем [Нм];
f – угол поворота вала двигателя [рад];
y – угол поворота вала редуктора (выход) [рад];
![]() –угловая скорость
[1/с];
–угловая скорость
[1/с];
Kp=1 – коэффициент передачи редуктора;
R, L - сопротивление и индуктивность якоря [Ом], [Гн];
K1, K2 – конструктивные параметры двигателя [Вс/рад], [Нм/А].
Управляющий сигнал – напряжение на якоре двигателя – u; выход объекта управления – y, измеряемый сигнал – y.
Рассчитаем значения ωн и L:
![]() с-1;
с-1;
![]() Гн.
Гн.
Рассчитаем коэффициенты K1 и K2:
![]() (Нм/А);
(Нм/А);
![]() (Вс/рад).
(Вс/рад).
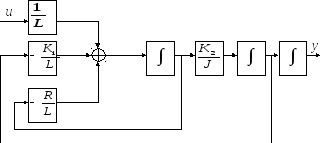
Для составления структурной схемы объекта управления, напишем систему уравнений, которая получается из исходных данных.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
в итоге получаем следующую систему:

![]()
![]()
![]()
Структурная схема объекта управления:
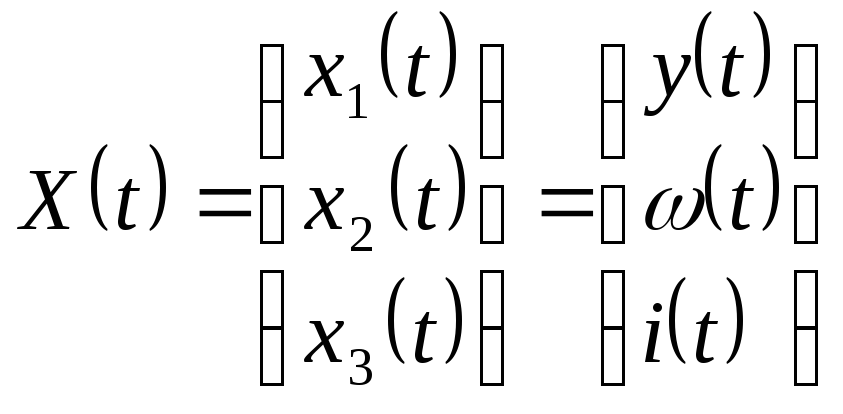
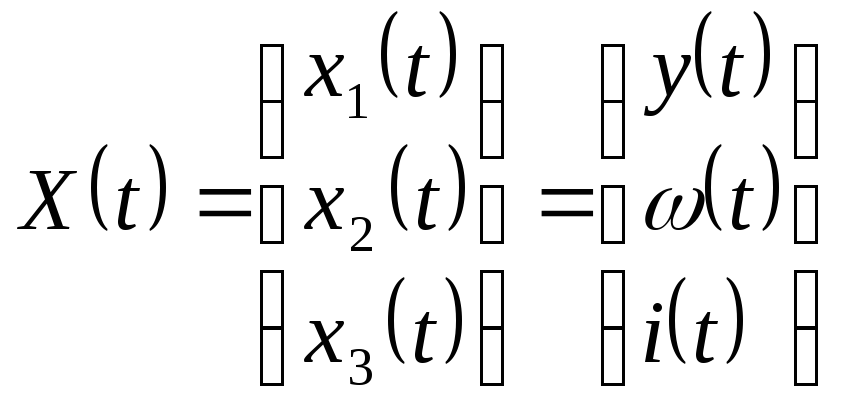
Система дифференциальных уравнений в форме Коши:
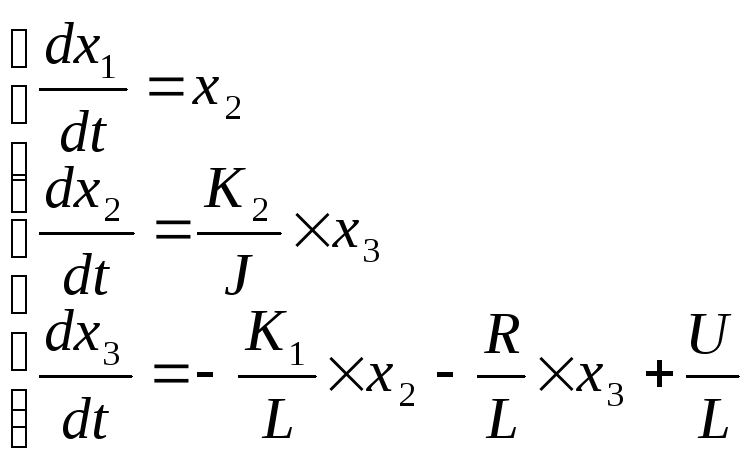
где:
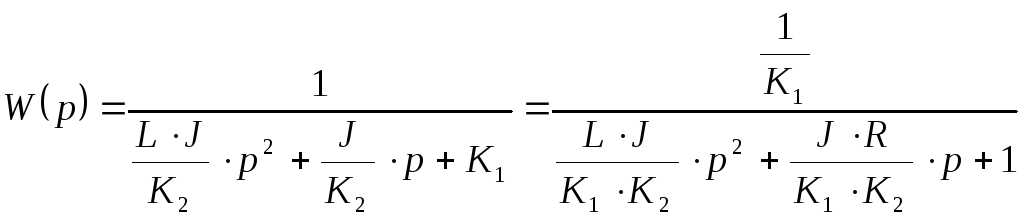
Определение передаточной функции объекта управления
В данном разделе мы определяем передаточную функцию, считая выходным сигналом угловую скорость ω.
Вернемся к основному уравнению:
![]() ,
,
подстановкой исходных данных приведем ее к удобному для нас виду:
![]() ,
,
![]() .
.
Для нахождения передаточной функции вспомним ее определение. Передаточной функцией звена или системы называется отношение изображения выходного сигнала к изображению входного сигнала при нулевых начальных условиях. Передаточная функция представляет собой дробь, числитель которой является результатом замены производных степенями p правой части дифференциального уравнения, а знаменатель – левой.
Передаточная функция:
![]() .
.
Перейдем к изображениям
![]()
после подстановки:
 ;
;
найдем J:
![]() м.
м.
Итак, получаем
![]()
![]() .
.
если представить в стандартном виде, то получим:
![]()
где:
![]() с;
с;
![]() ;
;
![]()
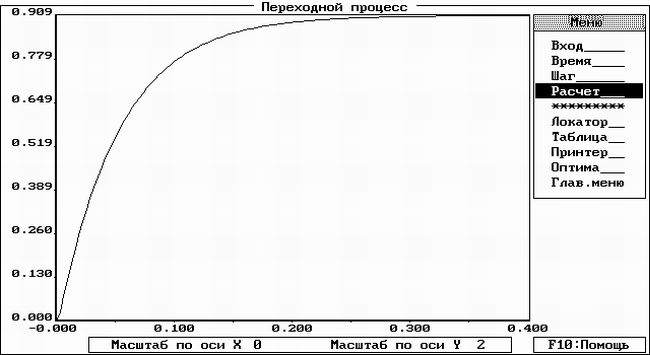
Построение логарифмических и переходной характеристик объекта
Изображение
переходной характеристики:
![]()
Для построения переходной характеристики используем систему CALLISTO.
1.В редакторе модели создаем необходимую модель:
-
очищаем редактор (F1,F9)
-
ставим линейный блок(F2);
-
обозначаем вход(F7) и выход(F8);
-
задаем параметры (Esc,F2,Enter):
P0=K=90.91,
Q0=1,Q1=2Tξ=5.45E-02, Q2=T2=1.1E-04.
2.Выходим из редактора модели (Esc,F2,F6)
3.Заходим в «Переходные процессы»
-
задаем сигнал на входе 1(t);
-
задаем время 0.4;
-
задаем шаг 0.0008;
-
д
 елаем
расчет.
елаем
расчет.
График переходной характеристики.
Для построения ЛАЧХ и ЛФЧХ выходной сигнал будем брать не угловую скорость ω, а угол поворота вала двигателя f.
![]() ;
;
![]() ;
;
![]() ;
;
![]() ;
;
![]() .
.
Для данного случая передаточная функция будет иметь вид:
![]() .
.
В стандартном виде
![]() .
.
Построения ЛАЧХ и ЛФЧХ также проводим при помощи системы CALLISTO. Для этого следуем ранее отмеченным пунктам, но вместо одного линейного блока вводим два. Второй блок имеет следующие параметры:
P0=K1=1, Q1=T1=1.
Завершив работу в редакторе модели, заходим в «Частотные характеристики». Выбираем диаграмму (ЛАЧХ, затем ЛФЧХ), задаем диапазон частот (0-10000) и делаем расчет.
Г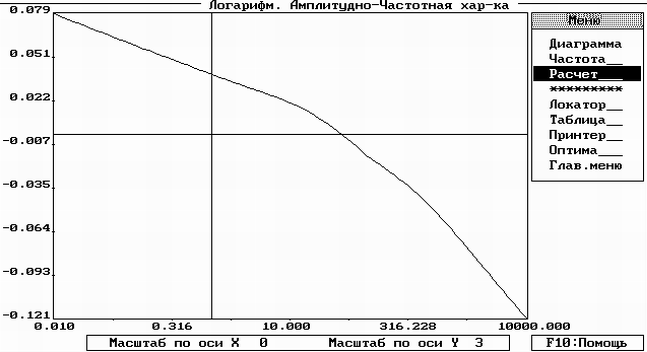 рафик
ЛАЧХ
рафик
ЛАЧХ
и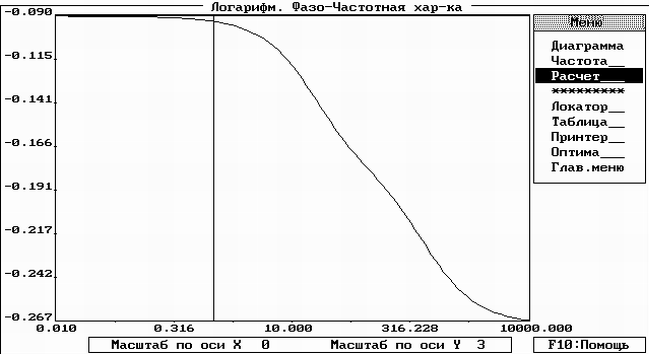 ЛФЧХ.
ЛФЧХ.
Составление уравнения состояния непрерывного объекта
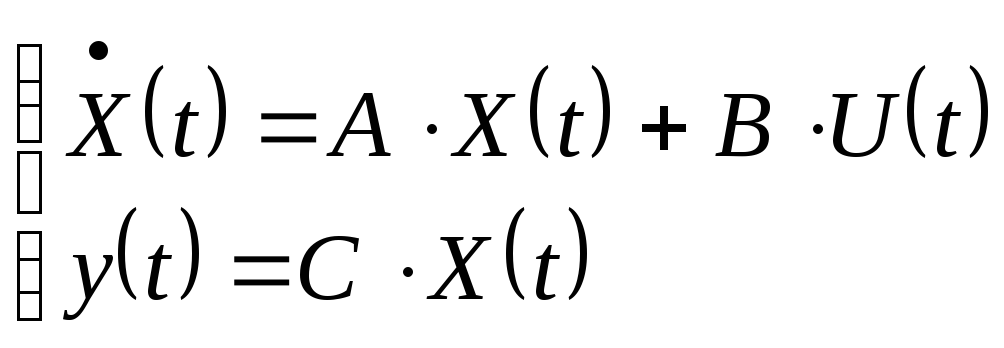 , где
, где
 ;
;
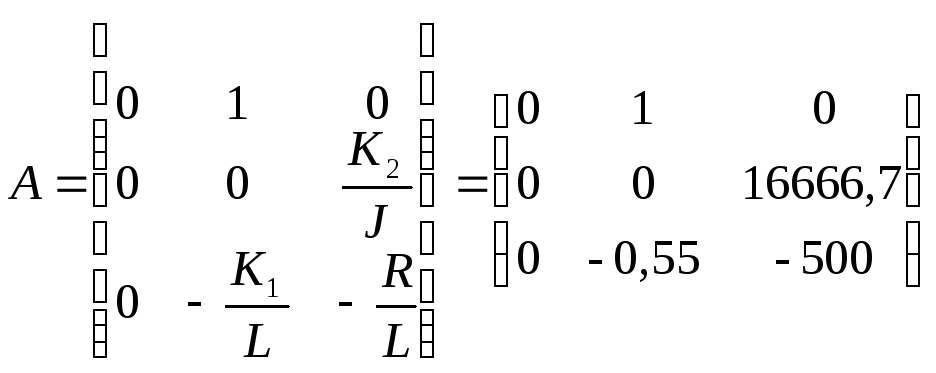 ;
;
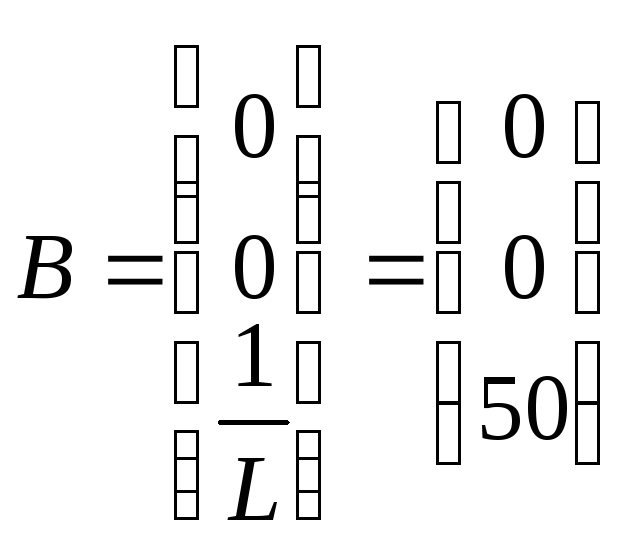 ;
;
![]() .
.
Определение периода квантования управляющей ЦВМ
Период квантования управляющей ЦВМ находим через время переходного процесса непрерывного объекта tр по формуле:
![]() .
.
Время переходного процесса мы определяем по переходной характеристике, построенной в системе CALLISTO, на уровне 0,95 скорости. В результате получаем следующие данные:
![]() с;
с;
![]() с.
с.
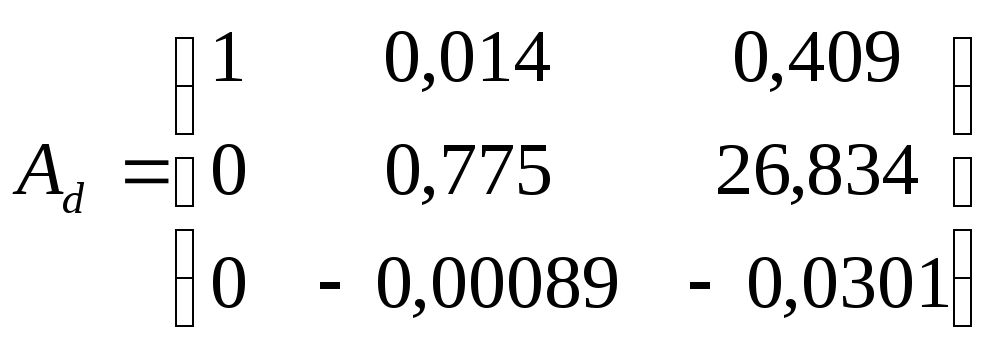
Составление уравнений состояния дискретной модели объекта
![]()
Матрица Ad
![]()
Матрица Bd
![]()
Матрица управляемости дискретной модели объекта:
![]()
det Sсo = -0,642
![]() ,
т.е. система полностью управляема.
,
т.е. система полностью управляема.
Матрица наблюдаемости дискретной модели объекта:
det Sob = 7,483343E-04
![]() ,
т.е. система полностью наблюдаема.
,
т.е. система полностью наблюдаема.
Вектор H:
Расчет параметров цифрового регулятора состояния, обеспечивающего торможение двигателя за минимальное число тактов квантования
Матрица управления из условия окончания переходного процесса за минимальное число тактов:
![]()
где:
![]() .
.
![]()
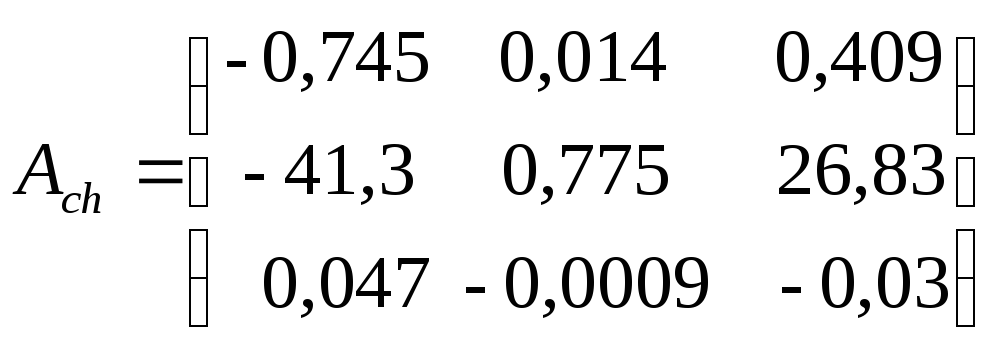
Расчет параметров оптимального быстродействия наблюдателя состояния и составление его структурной схемы
Вектор наблюдаемости:
 .
.
Структурная схема наблюдателя:
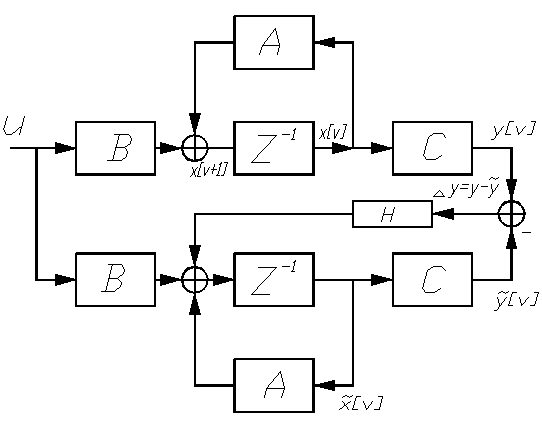
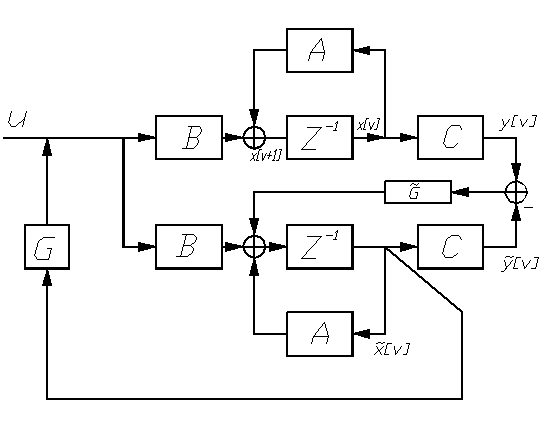
Запись уравнений состояния замкнутой цифровой системы и составление её структурной схемы
Уравнения состояния наблюдателя:

Структурная схема наблюдателя, замкнутой цифровой системы:
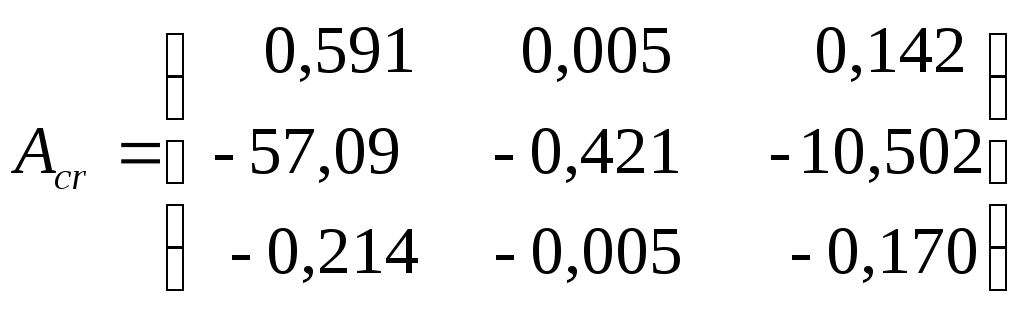
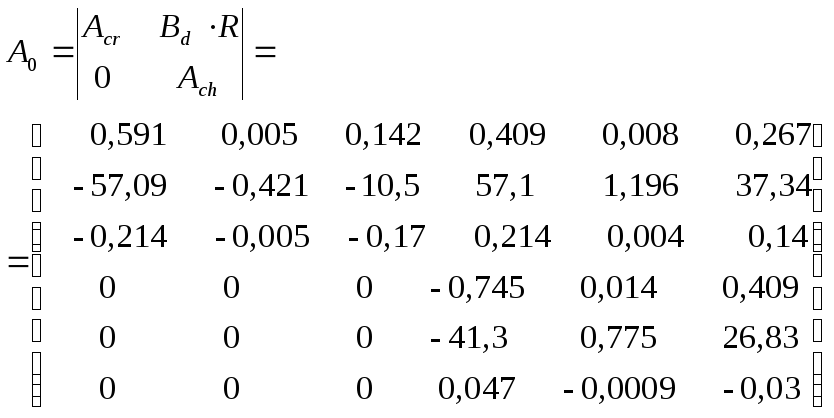
Матрица замкнутой системы с регулятором состояния:
![]()
Если посмотреть матрицу
![]() :
:
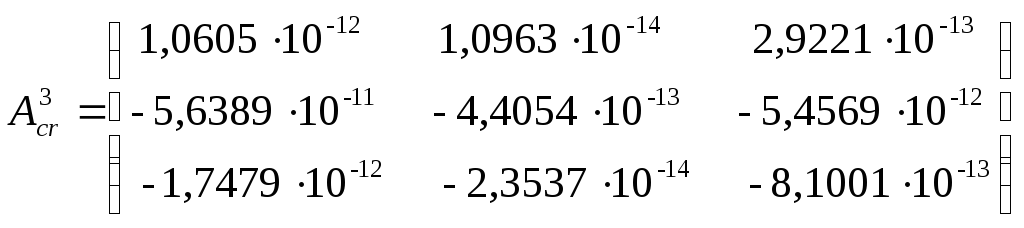
то увидим, что она очень мала, т.е. за три такта процесс полностью устанавливается.
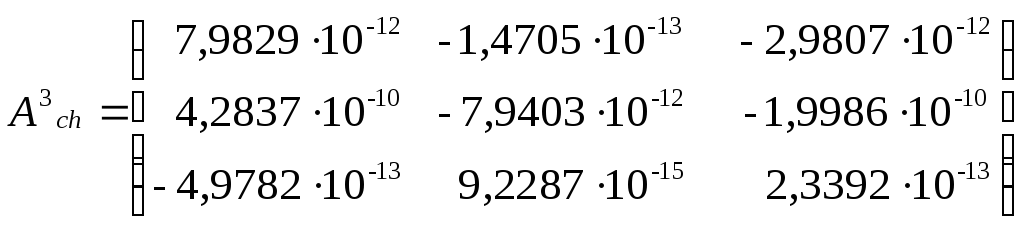
Собственная матрица наблюдателя:
![]()
Если
посмотреть матрицу
![]() то увидим, что она очень мала, т.е. за три
такта процесс полностью устанавливается.
то увидим, что она очень мала, т.е. за три
такта процесс полностью устанавливается.
Вектор состояния замкнутой системы с регулятором и наблюдателем:
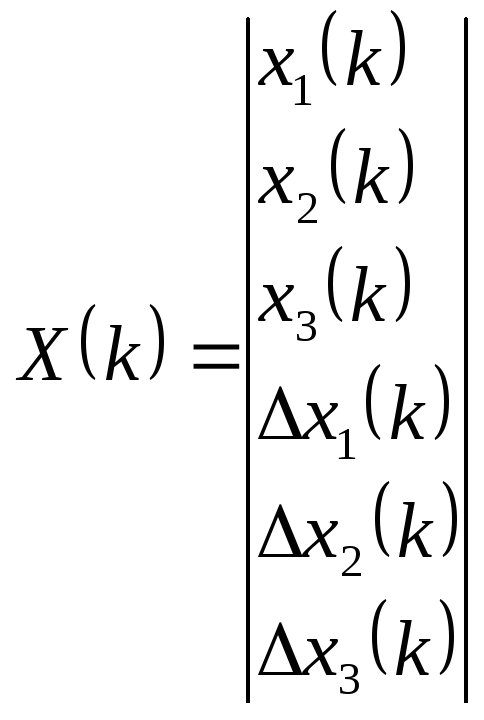
где:
![]() - переменные состояния объекта.
- переменные состояния объекта.
![]() - переменные состояния наблюдателя.
- переменные состояния наблюдателя.
![]()
Матрица замкнутой системы с регулятором состояния и наблюдателем:
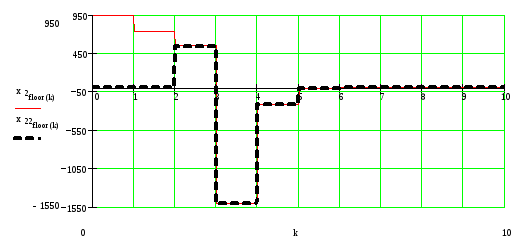
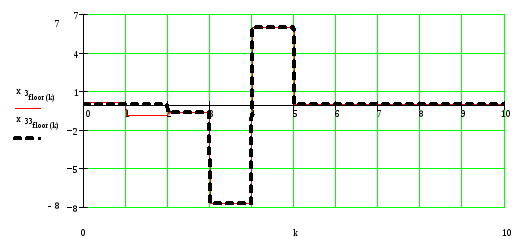
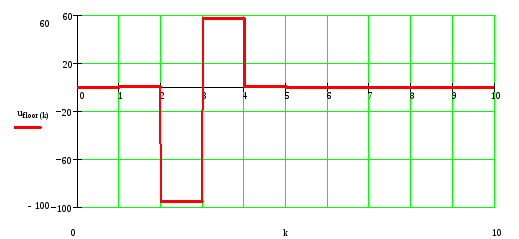
Расчет и построение графиков сигналов в цифровой системе с наблюдателем и регулятором состояния
Вектор начальных условий:
![]()
![]()
![]()
![]()
_
x1(0)=0
_
x2(0)=0
_
x3(0)=0
Решение уравнений состояния
|
k |
x1(k) |
x1(k) |
x2(k) |
x2(k) |
x3(k) |
x3(k) |
u(k) |
|
0 |
0,0E+00 |
0,0E+00 |
9,4E+02 |
0,0E+00 |
1,3E-01 |
0.0E+00 |
0.0E+00 |
|
1 |
1,3E+01 |
0,0E+00 |
7,3E+02 |
0,0E+00 |
-8,4E-01 |
-6,4E-12 |
1.2E-11 |
|
2 |
2,3E+01 |
2,3E+01 |
5,5E+02 |
5,4E+02 |
-6,2E-01 |
-6,2E-01 |
-9,5E+01 |
|
3 |
1,6E+01 |
1,6E+01 |
-1,5E+03 |
-1,5E+03 |
-7,7E+00 |
-7,7E+00 |
5,7E+01 |
|
4 |
5,0E-01 |
5,0E-01 |
-2,1E+02 |
-2,1E+02 |
6,0E+00 |
6,0E+00 |
2,3E-01 |
|
5 |
1,9E-03 |
1,9E-03 |
-9,4E-01 |
-9,4E-01 |
2,7E-02 |
2,7E-02 |
-1,5E-04 |
|
6 |
-6,9E-12 |
-6,9E-12 |
2,1E-09 |
2.1E-09 |
-5,2E-11 |
-5,2E-11 |
-1.1E-11 |
|
7 |
-8,9E-14 |
-8,9E-14 |
4,0E-11 |
4,0E-11 |
-1.1E-12 |
-1.1E-12 |
-2.5E-14 |
|
8 |
-2,3E-16 |
-2,3E-16 |
1,1E-13 |
1,1E-13 |
-3.2E-15 |
-3.2E-15 |
1,8E-17 |
|
9 |
8,9E-25 |
8,9E-25 |
-2,9E-22 |
-2,9E-22 |
7,1E-24 |
7,1E-24 |
1.3E-24 |
|
10 |
1,1E-26 |
1,1E-26 |
-4,9E-24 |
-4,90E-24 |
1.4E-25 |
1.4E-25 |
2.2E-27 |
¦Umax¦ = 94,527 B.
Графики сигналов в цифровой системе с наблюдателем

Литература
-
Иванов Е.А., Сильченкова В.В. Линейные системы автоматического управления.- М.: МИЭТ,1980.
-
Иванов Е.А. Метод пространства состояний в теории линейных непрерывных и цифровых систем управления.- М.:МИЭТ,1990.
-
Изерман Р. Цифровые системы управления. – М.: Мир,1984.
-
Волков И.И., Миловзоров В.П. Электромашинные устройства автоматики. – М.: Высшая школа,1986.