Обусловленность матрицы. Погрешности.
Числа обусловленности матрицы определяют чувствительность решения системы линейных уравнений к погрешностям исходных данных. Следующие функции позволяют найти числа обусловленности матриц.
Значение cond(X), близкое к 1, указывает на хорошо обусловленную матрицу;
Вернемся к анализу формулы (4) для вариации решения x
![]()
Пусть матрица А известна точно (
 )
и погрешность решения связана лишь с
погрешностью
)
и погрешность решения связана лишь с
погрешностью правой части, тогда:
правой части, тогда:
![]()
Из:
![]()
Перемножая полученные неравенства, найдем:
![]()
Или
![]()
![]() =M/m
- число
обусловленности матрицы А.
=M/m
- число
обусловленности матрицы А.
![]() - всегда (в любой
норме), т.о. хорошо обусловленные матрицы
– это матрицы с малым
- всегда (в любой
норме), т.о. хорошо обусловленные матрицы
– это матрицы с малым
![]() ,
при этом относительная погрешность
решения мала.
,
при этом относительная погрешность
решения мала.
Пусть известно возмущение
 матрицыА,
при условии, что правая часть f
задана точно.
матрицыА,
при условии, что правая часть f
задана точно.
Тогда:
![]()
Или
![]()
Таким образом, чем больше число обусловленности, тем чувствительнее система к округлениям.
Системы с большим числом обусловленности называют плохо обусловленными.
В случае СЛАУ 2-го порядка понятие обусловленности матрицы допускает наглядную геометрическую интерпретацию.

Лекция №3
Метод последовательного исключения неизвестных – метод Гаусса.
Методы решения систем линейных алгебраических уравнений (СЛАУ): 1) точные (прямые) 2)приближенные ( методы последовательных приближений.)
Прямые методы : метод Крамера, метод Гаусса и его модификации: (метод главного элемента, метод квадратного корня, метод отражений и другие), метод ортогонализации. N £ 103.
Методы последовательных приближений (итерационные):
метод простой итерации,
метод Зейделя,
метод релаксаций,
градиентные методы и их модификации. N¸ 106.
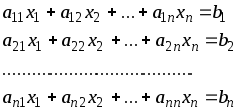
Рассмотрим систему n линейных алгебраических уравнений с n неизвестными:
 (1)
(1)
в матричном виде: Ax = b;
здесь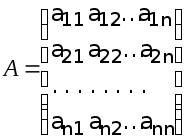 -
квадратная матрица размераn´n,
-
квадратная матрица размераn´n,
![]() ,
, ![]() -
векторы n-го порядка.
-
векторы n-го порядка.
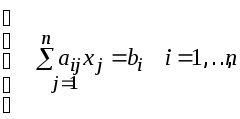
В индексной форме:
 (2)
(2)
Система линейных уравнений называется совместной, если она имеет хотя бы одно решение, и несовместной (противоречивой), если она не имеет решений.
Совместная система называется определенной, если она имеет единственное решение, и неопределенной, если более одного решения.
1. Схема единственного деления
Делим первое уравнение этой системы на коэффициент a11 ¹ 0 при неизвестном х1 (ведущий элемент).
Выполнения условия a11¹ 0 можно добиться всегда путем перестановки уравнений системы.
![]() (3) или
(3) или
Исключаем неизвестное х1 из остальных уравнений системы (для этого достаточно из каждого уравнения (i =2,3,…,n) вычесть уравнение (3), предварительно умноженное на коэффициент при х1 , т.е. на a21, a31 и т.д. ai1,
Например:
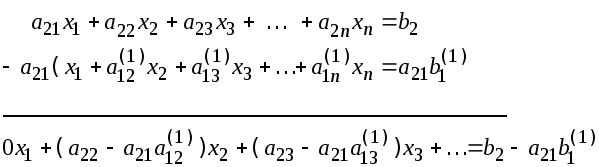
Обозначим

Преобразованные уравнения будут иметь вид:
![]()
![]()
Здесь обозначено
![]()
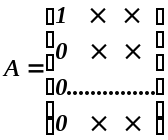
Матрица
системы имеет вид:
Вслед за этим, оставив первое уравнение в покое, над остальными уравнениями системы совершим аналогичные преобразования:
выберем из их числа уравнение с ведущим элементом a22(1)
и исключим с его помощью из остальных уравнений неизвестное х2.
Повторяя этот процесс n раз, вместо системы (2) получим равносильную ей систему с треугольной матрицей:
![]()
![]() (4)
(4)
![]()
Матрицы такого вида называются верхними треугольными матрицами.
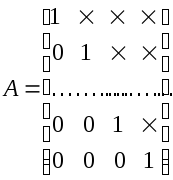
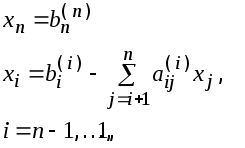
Из системы (4) последовательно находятся значения всех неизвестных xn, xn-1, ..., x1.
Таким образом, процесс решения (1) по методу Гаусса распадается на два этапа. Первый этап, состоящий в последовательном исключении неизвестных, называют прямым ходом. (число арифметических действий ¸ 2N3/3)
Обратным ходом. (число арифметических действий ¸ N2)
Общие формулы обратного хода имеют вид: