

4. Разработайте структурную схему усо автоматической системы управления роботом -манипулятором с 4-мя степенями свободы.


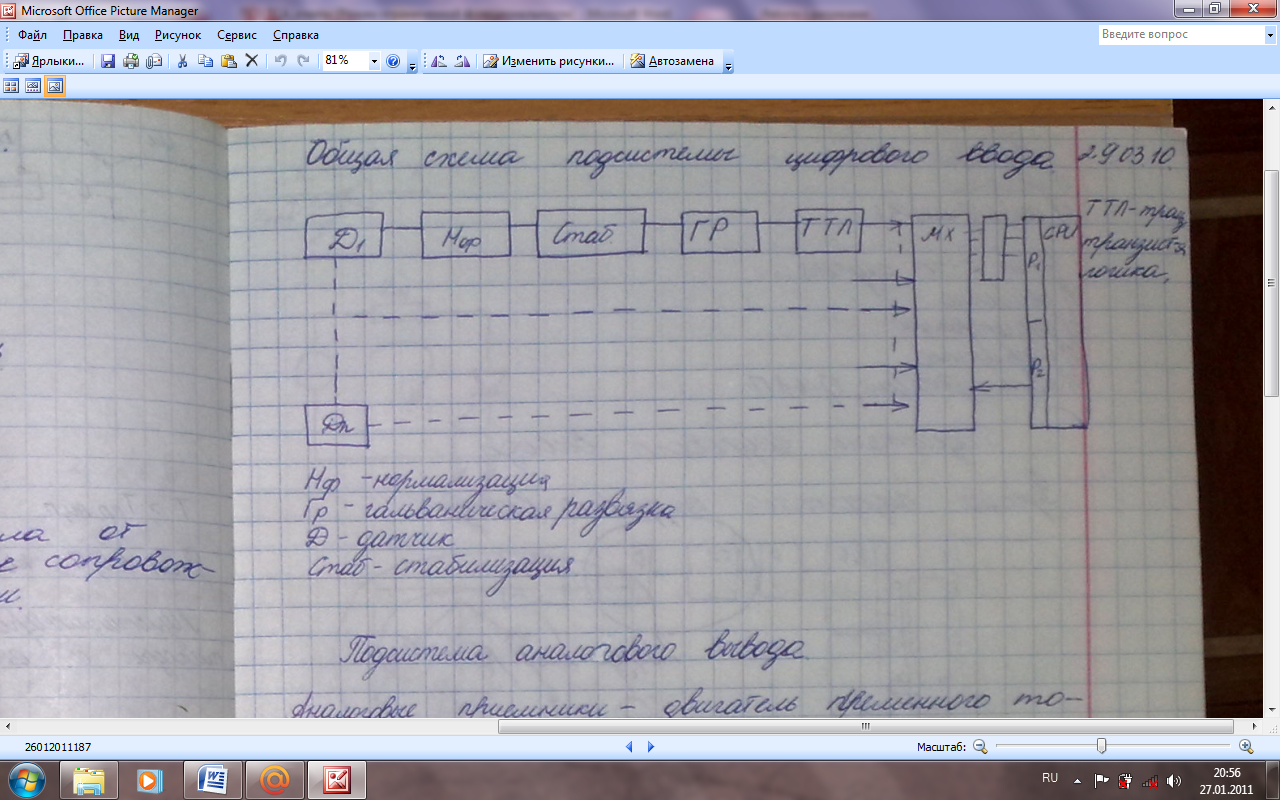


5. Реализуйте программный асинхронный ввод данных с индуктивного датчика малых линейных перемещений для омэвм мк51.

Программа обслуживания прерываний находится вне тела основной процедуры.



Блокировка
приоритетов равного и низкого уровня
Задать
номер канала МХ
Ввод
1го байта

Задание
2го байта

Ввод
2го байта


Формирование
сигнала Start
НЕТ

Вывод
Start
ДА

Выход
из подпрограммы
∆Tmax
= 0.5ms
время
преобразования
6. Разработайте функциональную схему, алгоритм и подпрограмму обмена данными локальной мпсу на базе омэвм мк51 с эвм высшего ранга.


\
MAIN: ввод данных в порт
mov p1, #FFh ; установка порта P1
Read_info:
clr p2.0 ; устанавливаем на выходе порта p2.0 ноль.
clr p2.1 ; устанавливаем на выходе порта p2.1 ноль.
clr p2.2 ; разрешаем считывание со всех мультиплексоров первые биты
mov a, p1 ; передаем этот байт в Акк из порта р1
mov 20h, a ; записываем полученный байт в РПД с адресом 20h
setb p2.3 ; запрещаем считывание со всех мультиплексоров
clr p2.0 ; устанавливаем на выходе порта p2.0 ноль.
setb p2.1 ; устанавливаем на выходе порта p2.1 1.
clr p2.2 ; разрешаем считывание со всех мультиплексоров 2 биты
mov a, p1 ; передаем этот байт в Акк из порта р1
mov 21h, a ; записываем полученный байт в РПД с адресом 21h
setb p2.3 ; запрещаем считывание со всех мультиплексоров
Write_info ; Вывод данных через регистры
;Схема выбора регистров по порту Р2
; 00001001 RG1
; 00001010 RG2
; 00001100 RG3
clr p2.0
clr p2.1
setb p2.2 ; С помощью дешифратора запись разрешается только в 1 регистр
out p0, 25h ; вывод на р0 байт управляющих сигналов 25h
setb p3.6 ; Подается сигнал на тактовый вход регистра - производится запись в 1 регистр.
clr p2.0
setb p2.1
clr p2.2 ; С помощью дешифратора запись разрешается только во 2 регистр
out p0, 26h ; вывод на р0 байт управляющих сигналов 26h
setb p3.6 ; Подается сигнал на тактовый вход регистра - производится запись в 2 регистр.
clr p2.0
setb p2.1
setb p2.2 ; С помощью дешифратора запись разрешается только в 3 регистр
out p0, 27h ; вывод на р0 байт управляющих сигналов 27h
setb p3.6 ; Подается сигнал на тактовый вход регистра - производится запись в 3 регистр.