Курсовые / TM курсовик 2 / Мой курсач / Мой курсач / Манипулятор
.docМанипулятор
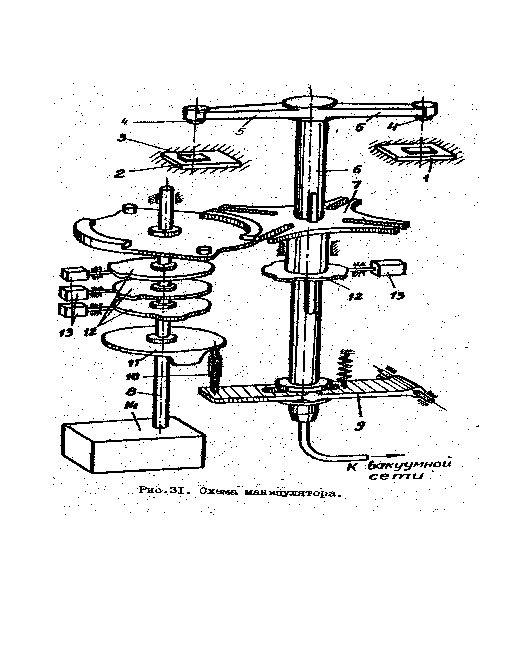
Манипулятор предназначен для транспортировки микросхем о одной рабочей позиции на другую. Схема манипулятора показана на рис.31, где 1-позиция загрузки-выгрузки; 2-одна из рабочих позиций; 3-обрабатываемая микросхема; 4-вакуумные захваты; 5-рычаги манипулятора; 6-штанга; 7-мальтийский механизм; 8-распределительный вал; 9-рычаг подъема штанги; 10-толкатель; 11-кулачок механизма подъема штанги; 12-кулачки системы управления; 13-микропереключатели; 14-электромеханический привод.
Рабочие
позиции расположены равномерно по
окружности. Перенос изделия с одной
позиции на другую осуществляется с
помощью рычагов 5 с вакуумными захватами
4. По окончании очередной технологической
операции включается электродвигатель
привода 14, и распределительный вал 8
начинает равномерно вращаться. Кулачок
11, воздействуя через толкатель 10 на
рычаг 9, опускает штангу 6. Движение
штанги прекращается, когда между
захватами 4 и изделием 3 остается небольшой
зазор. Величину зазора можно регулировать
изменением длины толкателя 10. После
остановки штанги один из кулачков
системы управления дает сигнал на
подключение к вакуумной системе.
Вакуумные захваты притягивают микросхемы.
Штанга 6 поднимается и с помощью
мальтийского механизма 7 поворачивается
на 90°. При этом микросхемы перемещаются
с одной позиции на другую. Одновременно
могут быть перенесены две микросхемы.
Затем штанга 6 вновь опускается, захваты
отключаются от вакуумной сети и микросхемы
освобождаются. Штанга 6 с рычагами 5 и
схватами 4 поднимается и поворачивается
на 90°; электродвигатель привода
отключается. На этом цикл работы
манипулятора заканчивается.