

Оглавление
ТЕХНИЧЕСКОЕ ЗАДАНИЕ НА ПРОЕКТ 2
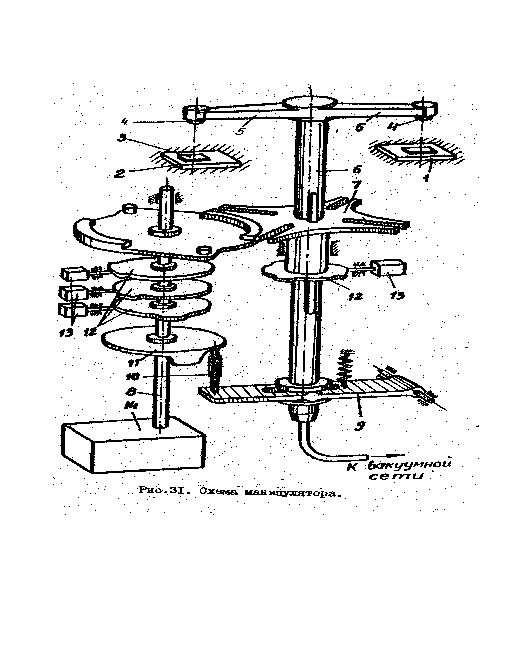
Рабочие позиции расположены равномерно по окружности. Перенос изделия с одной позиции на другую осуществляется с помощью рычагов 5 с вакуумными захватами 4. По окончании очередной технологической операции включается электродвигатель привода 14, и распределительный вал 8 начинает равномерно вращаться. Кулачок 11, воздействуя через толкатель 10 на рычаг 9, опускает штангу 6. Движение штанги прекращается, когда между захватами 4 и изделием 3 остается небольшой зазор. Величину зазора можно регулировать изменением длины толкателя 10. После остановки штанги один из кулачков системы управления дает сигнал на подключение к вакуумной системе. Вакуумные захваты притягивают микросхемы. Штанга 6 поднимается и с помощью мальтийского механизма 7 поворачивается на 90°. При этом микросхемы перемещаются с одной позиции на другую. Одновременно могут быть перенесены две микросхемы. Затем штанга 6 вновь опускается, захваты отключаются от вакуумной сети и микросхемы освобождаются. Штанга 6 с рычагами 5 и схватами 4 поднимается и поворачивается на 90°; электродвигатель привода отключается. На этом цикл работы манипулятора заканчивается. 3
Кинематический расчет привода 7
Расчет зубчатых передач редуктора 8
Закрытая цилиндрическая зубчатая передача (колеса 1-2) 8
Исходные данные для расчета: крутящий момент на ведомом колесе 2 равный моменту на втором валу редуктора, Т2=0,33 Н*м; w2=62,8 с-1; uцил.зак.(1-2)=6. 8
Для шестерни 8
Для колеса 8
Для прямозубой передачи Ka=495. Приняв ψba=0,2; 8
ψbd=ψba*(u+1)/2=0,2*(6+1)/2=0,7; Kβ=1,3; получим 8
Расчетная ширина колеса 8
Проверку ведем по материалу шестерни 9
Закрытая цилиндрическая зубчатая передача (колеса 3-4) 9
Исходные данные для расчета: крутящий момент на ведомом колесе 4 равный моменту на третьем валу редуктора, Т4=1,56 Н*м; w4=12,56 с-1; uцил.зак.(3-4)=5. 9
Для шестерни 9
Для колеса 9
9
Для прямозубой передачи Ka=495. Приняв ψba=0,3; 9
ψbd=ψba*(u+1)/2=0,3*(5+1)/2=0,9; Kβ=1,15, получим а3-4>=34,49 мм 9
Расчетная ширина колеса 10
Проверку ведем по материалу колеса 10
Открытая цилиндрическая передача (колеса 5-6) 10
Исходные данные для расчета: крутящий момент на ведомом колесе Т6=8,6 Н*м; w6=2,09 с-1; uцил.отк.(5-6)=6. 10
Допускаемые контактные напряжения σНР для зубьев открытой передачи меньше, чем для закрытых передач, в KL раз. Коэффициент KL, зависящий от условий смазки, принимаем равным KL=0,9, тогда 10
Для прямозубой передачи Ka=495. Приняв ψba=0,3; 11
ψbd=ψba*(u+1)/2=0,3*(6+1)/2=1,05; Kβ=1,2; получим а5-6>=66,35 мм 11
Расчетная ширина колеса 11
Проверку ведем по материалу колеса 11
Проектный расчет валов 12
Проверочный расчет валов на статическую прочность 13
Подбор подшипников и проверка их на долговечность 16
Список литературы 17
Приложение 18
Техническое задание на проект
Манипулятор
Манипулятор предназначен для транспортировки микросхем о одной рабочей позиции на другую. Схема манипулятора показана на рис.31, где 1-позиция загрузки-выгрузки; 2-одна из рабочих позиций; 3-обрабатываемая микросхема; 4-вакуумные захваты; 5-рычаги манипулятора; 6-штанга; 7-мальтийский механизм; 8-распределительный вал; 9-рычаг подъема штанги; 10-толкатель; 11-кулачок механизма подъема штанги; 12-кулачки системы управления; 13-микропереключатели; 14-электромеханический привод.
Рабочие позиции расположены
равномерно по окружности. Перенос
изделия с одной позиции на другую
осуществляется с помощью рычагов 5 с
вакуумными захватами 4. По окончании
очередной технологической операции
включается электродвигатель привода
14, и распределительный вал 8 начинает
равномерно вращаться. Кулачок 11,
воздействуя через толкатель 10 на рычаг
9, опускает штангу 6. Движение штанги
прекращается, когда между захватами 4
и изделием 3 остается небольшой зазор.
Величину зазора можно регулировать
изменением длины толкателя 10. После
остановки штанги один из кулачков
системы управления дает сигнал на
подключение к вакуумной системе.
Вакуумные захваты притягивают микросхемы.
Штанга 6 поднимается и с помощью
мальтийского механизма 7 поворачивается
на 90°. При этом микросхемы перемещаются
с одной позиции на другую. Одновременно
могут быть перенесены две микросхемы.
Затем штанга 6 вновь опускается, захваты
отключаются от вакуумной сети и микросхемы
освобождаются. Штанга 6 с рычагами 5 и
схватами 4 поднимается и поворачивается
на 90°; электродвигатель привода
отключается. На этом цикл работы
манипулятора заканчивается.
Кинематический расчет привода
Мощность на выходном валу редуктора
Nвых=N=18 Вт
Выбираем передаточные числа и рассчитываем n дв
uцил.зак.=5
uцил.отк.=6
uобщ.=uцил.отк.*uред.=5*5*6=150
uобщ.=n дв/n вых => n дв=uобщ.*n вых
n вых=n =20 об/мин
n дв=150*20=3000 об/мин
КПД привода
ηобщ=ηмуфты*η2цил.зак.*ηцил.отк.*η4подш.=0,93*(0,96)2*(0,99)4=0,82
Требуемая мощность электродвигателя
Nдв=Nвых/ ηобщ=18/0,82=21,95 Вт
Выбираем электродвигатель СЛ – 261
Nдв=24 Вт
n дв=3600 об/мин
Разбиваем передаточное число по ступеням в соответствии с рекомендациями
uобщ.=n дв/n вых=3600/20=180
uцил.зак.(1-2)=6
uцил.зак.(3-4)=5
uред.=5*4=30
uцил.отк.(5-6)=uобщ./uред.=180/30=6
Угловая скорость вращения всех валов
w1=wдв=π* n дв/30=3,14*3600/30=376,8 с-1
w2=w1/uцил.зак.(1-2)=376,8/6=62,8 с-1
w3=w2/uцил.зак.(3-4)=62,8/5=12,56 с-1
w4=wвых=w3/uцил.отк.(5-6)=12,56/6=2,09 с-1
Крутящие моменты на валах
Твых=Nвых*60/2*π*n вых=18*60/2*3,14*20=8,6 Н*м
Т4=Твых=8,6 Н*м
Т3=Т4/uцил.отк.(5-6)* ηцил.отк.* ηподш.=8,6/6*0,93*0,99=1,56 Н*м
Т2=Т3/uцил.зак.(3-4)* ηцил.зак.* ηподш.=1,56/5*0,96*0,99=0,33 Н*м
Т1=Т2/uцил.зак.(1-2)* ηцил.зак.* ηподш.=0,33/6*0,96*0,99=0,06 Н*м