

детали машин / ргр1 моя / решение
.docxФ Г Б О У В П О «СПбГТИ(ТУ)»
КАФЕДРА МЕХАНИКИ
РГР 1
“Кинематический расчёт привода”
Вариант 132.
Студент гр. № 312
Чумаков С.В.
Преподаватель:
Телепнев М. Д.
Санкт-Петербург
2013
Задание на РГР
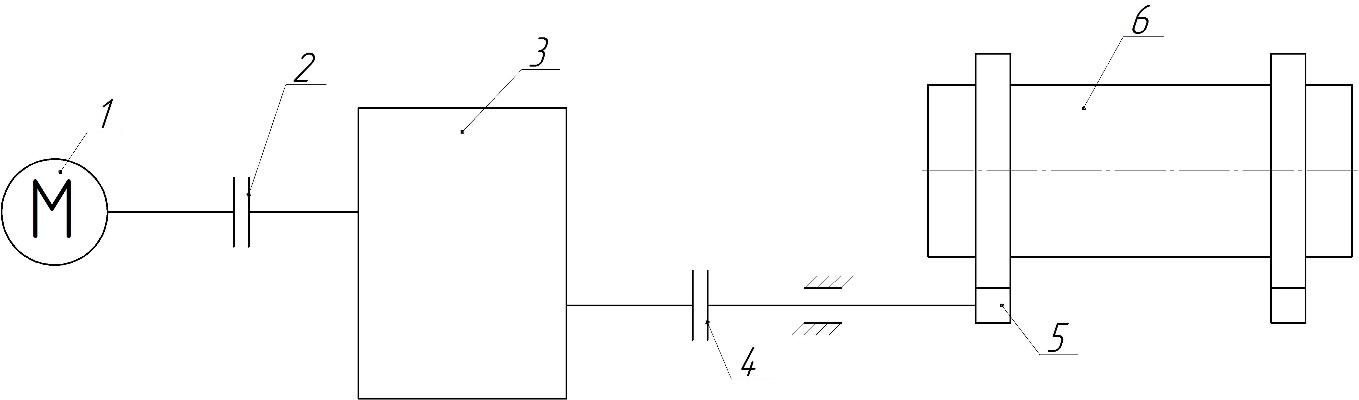
Рис. 1. Барабанный смеситель типа СБК-6000.
1 – Электродвигатель.
2 – Муфта.
3 – Горизонтальный цилиндрический редуктор.
4 – Муфта.
5 – Ролик.
6 – Рабочий орган (барабан).
Барабанный смеситель типа СБК предназначен для смешения сухих материалов.
Смеситель состоит из горизонтального цилиндрического барабана внутри которого расположены винтовые и лопастные насадки.
Барабан установлен на четырёх родниковых опорах, смонтированных на раме. Два ролика приводятся во вращение от привода, состоящего из электродвигателя и редуктора. Привод барабана реверсивный режим.
Nр.о.
= 0,8кВт; nр.о.
= 58
1. Кинематический расчёт привода.
Начальные данные:
![]()
![]()
![]()
![]()
1.1 Разбивка передаточного отношения привода по ступеням.
Предварительно выбираем двигатель с номинальной мощностью:
![]()
![]()
![]()
![]()
![]()
Синхронная частота вращения вала двигателя (при работе без нагрузки) определяется частотой переменного тока f и числом пар полюсов статора p:
![]()
![]()
![]()
![]()
Частота вращения вала двигателя под нагрузкой:
![]()
![]()
Общее передаточное отношение привода с учётом его структуры:
![]()
Расчётное значение передаточного отношение привода:
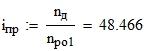
Предварительное значение передаточного отношения редуктора:
![]()
Тип редуктора: горизонтально - цилиндрический, трёх ступенчатый.
Определяем передаточные числа ступеней:
![]()
![]()

Окончательные передаточные числа:
![]()
![]()
![]()
Окончательное значение передаточного отношения редуктора:
![]()
1.2 Выбор типоразмера электродвигателя.
Перед выполнением расчётов составил полную кинематическую схему привода с нумерацией валов от двигателя к рабочему органу Рис. 2.
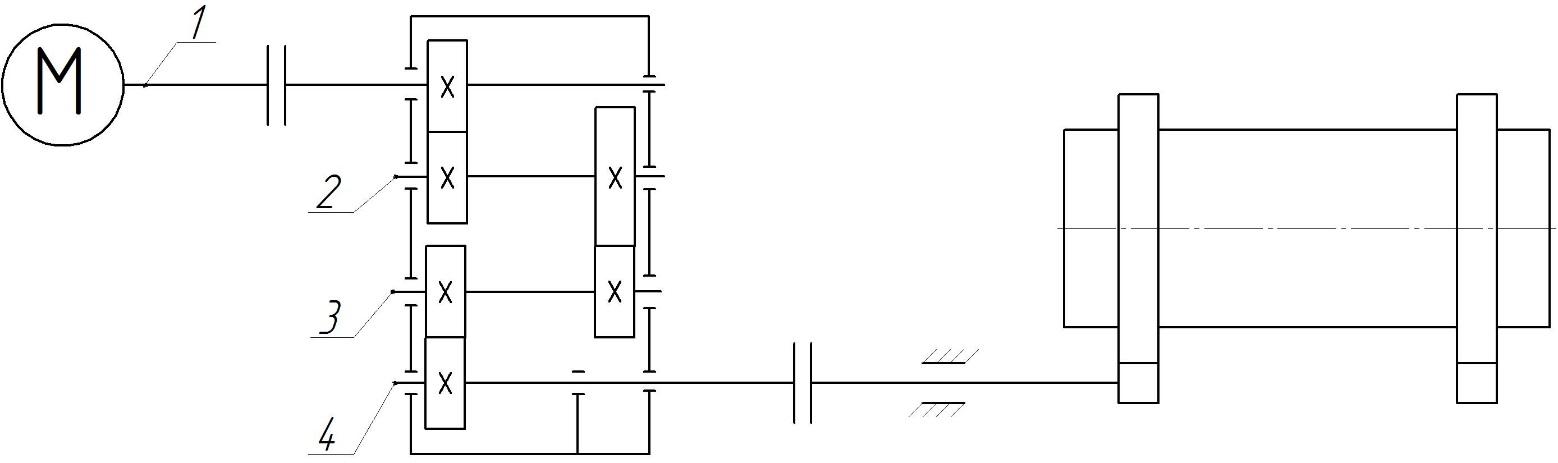
Рис. 2. Кинематическая схема привода.
Общий КПД привода:
![]()
Где:
![]()
![]()
![]()
![]()
![]()
Определяем потребляемую мощность электродвигателя:
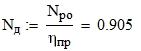
![]()
Выбрали двигатель 4А71В2 с параметрами:
![]()
![]()
![]()
![]()
![]()
![]()
1.3 Определение угловых скоростей и моментов на валах привода.
Угловая скорость первого вала (вала двигателя):
![]()
![]()
Угловые скорости второго и следующих валов:
![]()

![]()
![]()
Т. е. расчётное значение n рабочего органа:
![]()
![]()
![]()
Отклонение от заданного - 3%, что меньше допустимого 4%.
(Разбивка по i привода по ступеням принимается)
Крутящий момент первого вала (вала двигателя):
![]()
Крутящие моменты для второго и следующих валов:
![]()
![]()
![]()
![]()
![]()
![]()
2. Кинематический расчёт привода.
Начальные данные:
![]()
![]()
![]()
![]()
2.1 Разбивка передаточного отношения привода по ступеням.
Предварительно выбираем двигатель с номинальной мощностью:
![]()
![]()
![]()
![]()
![]()
Синхронная частота вращения вала двигателя (при работе без нагрузки) определяется частотой переменного тока f и числом пар полюсов статора p:
![]()
![]()
![]()
![]()
Частота вращения вала двигателя под нагрузкой:
![]()
![]()
Общее передаточное отношение привода с учётом его структуры:
![]()
Расчётное значение передаточного отношение привода:
Предварительное значение передаточного отношения редуктора:
![]()
Тип редуктора: горизонтально - цилиндрический, двух ступенчатый.
Определяем передаточные числа ступеней:
![]()
Окончательные передаточные числа:
![]()
![]()
Окончательное значение передаточного отношения редуктора:
![]()
2.2 Выбор типоразмера электродвигателя.
Перед выполнением расчётов составил полную кинематическую схему привода с нумерацией валов от двигателя к рабочему органу Рис. 3.
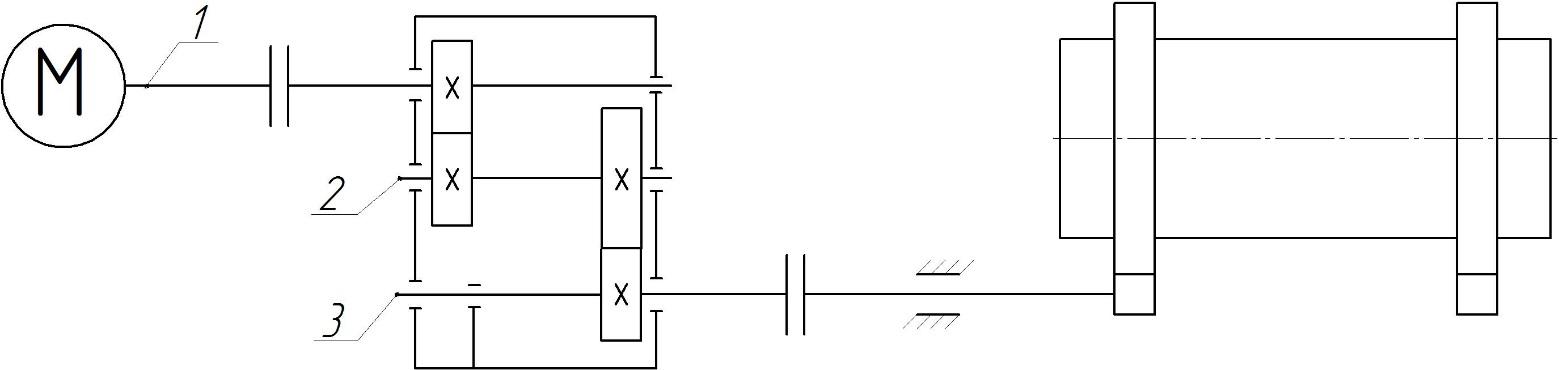
Рис. 2. Кинематическая схема привода.
Общий КПД привода:
![]()
Где:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Определяем потребляемую мощность электродвигателя:
![]()
Выбрали двигатель 4А90LB с параметрами:
![]()
![]()
![]()
![]()
![]()
![]()
2.3 Определение угловых скоростей и моментов на валах привода.
Угловая скорость первого вала (вала двигателя):
![]()
![]()
Угловые скорости второго и следующих валов:
![]()
![]()
Т. е. расчётное значение n рабочего органа:
![]()
![]()
![]()
Отклонение от заданного - 3%, что меньше допустимого 4%.
(Разбивка по i привода по ступеням принимается)
Крутящий момент первого вала (вала двигателя):
![]()
Крутящие моменты для второго и следующих валов:
![]()
![]()
![]()
![]()
3. Анализ вариантов кинематических схем.
Получить требуемые параметры рабочего органа можно используя различные передачи и двигатели с различной частотой вращения вала. При этом варианты схем привода будут отличаться по стоимости изготовления, стоимости эксплуатации (из-за разницы в общем КПД), массе и габаритам. Снижению габаритов и стоимости понижающих механических передач способствует использование низкоскоростных двигателей. Однако, при снижении частоты вращения вала, у двигателей растут относительные показания по габаритам, массе, стоимости и падения КПД.
|
Типо-размер двигателя |
р |
Усл. обознач. |
КПД % |
|
Габариты |
Масса |
Сто-им. |
|||
|
L,мм |
D,мм |
D0, |
m, |
M0, |
C0 |
|||||
|
4А71В2 |
1 |
EM1 |
77,5 |
2,0 |
395 |
235 |
1,00 |
42,0 |
1,00 |
1,00 |
|
4А90LB |
4 |
EM2 |
70 |
1.9 |
580 |
302 |
1.96 |
93,0 |
2.22 |
1.84 |

|
Элементы привода |
Параметры |
Коэфф. Кач. СQ |
||||||||||
|
Наименование |
Усл. обознач. |
p; i |
СE |
Do |
Mo |
Co |
|
|||||
|
1. Электро-двигатель |
EM1 |
1 |
0,78 |
1,0 |
1,0 |
1,0 |
|
|||||
|
2. Муфта компенсирующая |
CF |
- |
0.98 |
- |
- |
- |
||||||
|
3. Редуктор гориз.-цилиндр. |
RC3 |
50,3 |
0.91 |
1,8 |
0,8 |
0,5 |
||||||
|
4. Муфта компенсирующая |
CF |
- |
0.98 |
- |
- |
- |
||||||
|
Произведение параметров |
50,3 |
0,68 |
1,8 |
0,8 |
0,5 |
1,06 |
||||||
EM1 – CF – RC3 – CF - WT
Определение коэффициента качества привода со структурной схемой:
EM2 – CF – RC2 – CF – WT
|
Элементы привода |
Параметры |
Коэфф. Кач. СQ |
||||||||||
|
Наименование |
Усл. обознач. |
p; i |
СE |
Do |
Mo |
Co |
|
|||||
|
1. Электро-двигатель |
EM2 |
4 |
0.89 |
1.96 |
2.22 |
1.84 |
|
|||||
|
2. Муфта компенсирующая |
CF |
- |
0.98 |
- |
- |
- |
||||||
|
3. Редуктор конически - цилиндрический |
RC2 |
14,2 |
0,9 |
1,6 |
0,85 |
0,56 |
||||||
|
4. Муфта компенсирующая |
CF |
- |
0.98 |
- |
- |
- |
||||||
|
Произведение параметров |
56,8 |
0,77 |
3,136 |
1,887 |
1,03 |
7,919 |
||||||
Коэффициент качества:
Контроль результатов кинематического расчёт:
Коэффициенты качества привода по схеме EM – CF – RC – CF – WT с различными двигателями серии 4А при N = 18,5кВт
|
Число пар полюсов двигателя, р |
1 |
4 |
|
Коэффициент качества привода, СQ |
1,06 |
7,919 |
Таким
образом, лучший показатель СQ=
1,06имеет привод со структурной схемой
EM1
– CF
– RC3
– CF
– WT
с двигателем 4А71В2
(N
= 1,1кВт; S
= 6,3%, КПД = 77,5%.)
для режима S1
и горизонтально-цилиндрическим
трёхступенчатым редуктором ( ).
).