

Министерство образования и науки Российской Федерации
Государственное образовательное учреждение
высшего образовательного профиля
РОССИЙСКИЙ ГОСУДАРСТВЕННЫЙ
ГИДРОМЕТЕОРОЛОГИЧЕСКИЙ
УНИВЕРСИТЕТ
Кафедра
экспериментальной физики
атмосферы
ИССЛЕДОВАНИЕ РЕГИСТРАТОРА ДАЛЬНОСТИ ВИДИМОСТИ РДВ-1
ЛАБОРАТОРНАЯ РАБОТА № 12
по дисциплине
“Методы и средства гидрометеорологических измерений”.
Направление - Гидрометеорология
Специальность - Метеорология

Санкт - Петербург
2004
УДК 551.508
«Исследование регистратора дальности видимости».
Лабораторная работа №12 по дисциплине «Методы и средства гидрометеорологических измерений».
СПб, : РГГМУ, 2004, 24 с.
Лабораторная работа составлена на основе типовой программы дисциплины, читаемой студентам – метеорологам.
Описание содержит краткие теоретические сведения и перечень операций, выполняемых студентами. В работе применяется прибор РДВ – I, который незначительно отличается от последующих модификаций РДВ – 2 и РДВ – 3.
Текст описания несколько изменен в 2004 г. Добавлены указания особенностей прибора РДВ-3 по сравнению с более ранними модификациями.
|
|
Составители - проф. Л.И. Дивинский, доц. Н.О. Григоров
Редактор - проф. А.Д. Кузнецов |
© Российский государственный гидрометеорологический университет (РГГМУ), 2004.
Цель работы: изучение конструкции и принципа действия прибора РДВ–I, методики работы с прибором, и проведение измерений дальности видимости. Студенты группы «И» дополнительно знакомятся с принципиально новой схемой усилителя сигнала разбаланса и исследуют его амплитудную и частотную характеристики.
Краткое техническое описание прибора
Регистратор дальности видимости предназначен для непрерывных дистанционных измерений и регистрации метеорологической дальности видимости в диапазоне 250 – 6000 м с погрешностью порядка 10% (погрешность зависит от диапазона измерений и при больших дальностях может доходить до 20%) .
Метеорологическая дальность видимости Sм зависит от прозрачности атмосферы. В светлое время суток под метеорологической дальностью видимости понимают наибольшее расстояние, с которого можно различить на фоне неба вблизи горизонта черный объект, угловые размеры которого превышают 15 угловых минут. В ночное время – расстояние, на котором можно было бы при существующей прозрачности воздуха видеть такой объект в светлое время суток.
Световой поток, проходя через оптически однородную атмосферу, ослабевает по экспоненциальному закону:
Ф=Ф![]() exp(-
exp(-![]() Z),
Z),
где Ф – величина светового потока, ослабленного атмосферой. Измеряется в люменах (лм);
Ф![]() - величина светового потока до его
поступления в ослабляющую среду;
- величина светового потока до его
поступления в ослабляющую среду;
![]() -
коэффициент ослабления (м
-
коэффициент ослабления (м![]() );
);
Z – длина пути светового потока в атмосфере (м).
Коэффициент ослабления
![]() =
=
![]() ( I
)
( I
)
где
![]() - длина пути, на котором световой поток
ослабевает в е раз (е = 2,718).
- длина пути, на котором световой поток
ослабевает в е раз (е = 2,718).
Метеорологическая дальность видимости зависит от способности глаза различать контраст яркости двух объектов – неба у горизонта и черного тела на его фоне. Если ε - порог чувствительности глаза, то метеорологическая дальность видимости
![]() (1)
(1)
Обычно считается, что порог контрастной чувствительности глаза
ε = 0,035 (3,5 %), т.е. что глаз может различать два соприкасающихся друг с другом объекта, если яркости их поверхностей различаются на 3,5 % и больше.
Учитывая (I) и (2), имеем:
 (3).
(3).
Если предположить, Z = I км, то зная как ослабляется поток в оптически однородной среде на этой дистанции и вводя понятие коэффициента прозрачности
![]() ,
,
где Ф ( I км) – величина светового потока, ослабленная слоем среды протяженностью в I км, получаем:
S![]() =
=![]() .ln
.ln![]() (4).
(4).
Сопоставляя
( 2 ) и ( 4 ), видим, что![]()
![]() =
- ln
=
- ln![]() .
.
Вышеприведенные закономерности распространения световых потоков в атмосфере явились основополагающими при разработке РДВ–I.
Метод определения метеорологической дальности видимости, используемый в РДВ–I, основан на сопоставлении двух световых потоков: Ф – ослабленного атмосферой, в которой он проходит фиксированный ( в данном приборе двухсотметровый) путь, и исходного светового потока Ф0 .
Для более точного измерения соотношения двух потоков Ф /Ф0 в приборе использован компенсационный нулевой метод, сущность которого заключается в следующем: от лампы накаливания с помощью оптической системы формируются два световых потока. Один, называемый измерительным, проходит через двухсотметровый слой атмосферы, ослабляется аэрозолями и возвращается в прибор на фотоэлемент. Второй, называемый опорным, или потоком сравнения, проходит на фотоэлемент внутри прибора. Кроме того, на фотоэлемент в светлое время суток попадает дневной свет. Для того, чтобы избавиться от его влияния на работу прибора, оба световых потока (измерительный и сравнения) сделаны прерывистыми и имеют частоты прерывания 1780 Гц при скважности равной 2 (длительность светового импульса в 2 раза меньше периода их повторения, т.е. равна длительности паузы). Поскольку фотоэлемент один, то сравнение потоков осуществляется путем их поочередной коммутации – часть времени (1/297 с) фотоэлемент освещается измерительным потоком, а затем в течение того же времени - потоком сравнения.
Поступающий на фотоэлемент поток сравнения может регулироваться по интенсивности. Первая регулировка, называемая установочной, осуществляется однократно при настройке прибора после его размещения на позиции и эпизодически после ремонтных работ. Для этого в оптическую схему прибора (см. рис.1) включены установочные клинья. При этой регулировке поток сравнения, поступающий на фотоэлемент, устанавливается равным максимально возможному значению интенсивности измерительного потока, которое наблюдается при отсутствии ослабления в атмосфере. Практически такую установку производят, дождавшись ситуации, при которой высока прозрачность воздуха и дальность видимости оказывается не менее 30 км.
Второй вариант регулировки потока сравнения осуществляется оперативно в процессе работы прибора для того, чтобы сделать его интенсивность равной интенсивности ослабленного атмосферой измерительного потока. Для этого поток сравнения проходит через измерительную диафрагму, которая частично перекрывает его. Зная, насколько оказалось необходимо перекрыть поток сравнения, чтобы сравнять его интенсивность с интенсивностью измерительного потока, можно судить о метеорологической дальности видимости.
Такой метод сравнения двух потоков исключает влияние возможной нестабильности параметров элементов прибора на точность измерения дальности Sм , в частности, нестабильности яркости свечения лампы накаливания, коэффициента усиления усилительного тракта, чувствительности фотоэлемента.
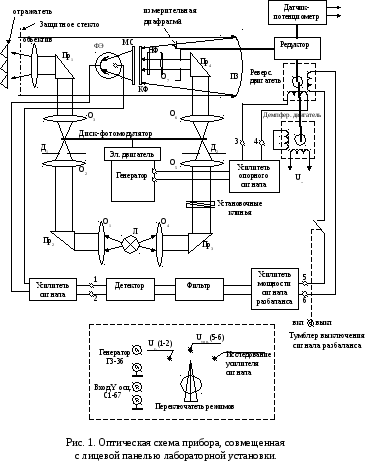
Для реализации подобного принципа измерения Sм в приборе РДВ-1 имеется специальная система формирования двух поочередно поступающих на фотоэлемент прерывистых световых потоков (измерительного и потока сравнения), схема которого представлена на рис 1.
На рис. 2 показан диск-фотомодулятор. Он предназначен для прерывания световых пучков мелкими зубьями, а также для пропускания по очереди измерительного светового пучка и пучка сравнения.
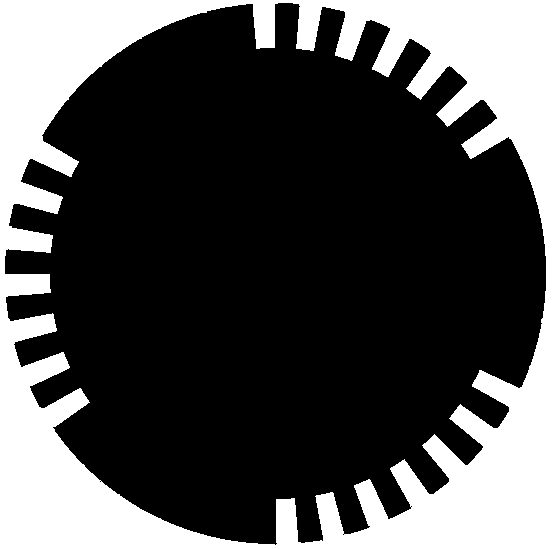
Рис. 2. Диск-фотомодулятор
Оптическая схема содержит источник света Л, который является общим для двух световых потоков. Измерительный поток формируется, проходя через объектив О1, призму ПР2, объектив О2, диафрагму Д1, отверстия диска фотомодулятора, призму ПР1, объектив О3, защитное стекло прибора, стометровый слой атмосферы, отражается от специального отражателя, представляющего собой набор из девяти угловых отражающих устройств, возвращаясь, еще раз проходит стометровый слой атмосферы; через защитное стекло прибора поступает на параболический отражатель (приемное зеркало ПЗ) и, отражаясь от него, через фильтр КФ и молочное стекло МС поступает на фотоэлемент ФЭ.
Световой поток сравнения формируется, проходя через объектив О4, призму ПР3, установочные клинья, объектив О5 , диафрагму Д2, отверстия диска фотомодулятора, объектив О6, призму ПР4, измерительную диафрагму ИД, объектив О7 , нейтральный фильтр НФ, светофильтр КФ, молочное стекло МС и попадает на фотоэлемент. Для начальной установочной регулировки светового потока сравнения используются установочные клинья. Световые потоки (измерительный и сравнения) проходят через диаметрально противоположные точки диска фотомодулятора, вращаемого электродвигателем со скоростью 2965 об/мин. Если на выходе диафрагмы Д1 и Д2 световые потоки непрерывны, то после диска-фотомодулятора они становятся прерывистыми и появляющимися поочередно.
При указанной скорости вращения диска частота прерывания каждого потока равна 1780 Гц, частота чередований измерительного и потока сравнения в 12 раз меньше – 148 Гц.
Для
того, чтобы можно было судить о том,
какой световой поток в данный момент
времени поступает на фотоэлемент –
сравнения или измерительный, специальным
генератором вырабатывается синусоидальное
опорное напряжение U![]() (рис. 3а),
частота которого равна частоте коммутации
световых потоков – 148 Гц. Генератор
опорного напряжения (ГОН)
– электромеханический.
Его ротор – шестиполюсный постоянный
магнит, который находится на одном валу
с ротором электродвигателя
и диском
модулятора ДМ
световых
потоков (рис.1). При настройке РДВ–I
фаза опорного напряжения устанавливается
такой, что каждому
световому потоку соответствует
свой характер изменения опорного
напряжения U
(рис. 3а),
частота которого равна частоте коммутации
световых потоков – 148 Гц. Генератор
опорного напряжения (ГОН)
– электромеханический.
Его ротор – шестиполюсный постоянный
магнит, который находится на одном валу
с ротором электродвигателя
и диском
модулятора ДМ
световых
потоков (рис.1). При настройке РДВ–I
фаза опорного напряжения устанавливается
такой, что каждому
световому потоку соответствует
свой характер изменения опорного
напряжения U![]() ,
а именно, при прохождении светового
потока сравнения генерируется
положительная полуволна опорного
напряжения, а при прохождении измерительного
потока – отрицательная.
,
а именно, при прохождении светового
потока сравнения генерируется
положительная полуволна опорного
напряжения, а при прохождении измерительного
потока – отрицательная.
Величина
тока, протекающего через фотоэлемент,
зависит от величины светового потока,
падающего на него. На рис.3 б–г представлены
временные зависимости тока через
фотоэлемент I![]() для некоторых
ситуаций, возникающих при работе РДВ –
I.
На рис.3б зависимость I
для некоторых
ситуаций, возникающих при работе РДВ –
I.
На рис.3б зависимость I![]() (t)
при измерении, производимом в светлое
время суток, в случае неравенства
интенсивности измерительного потока
и потока сравнения. Чем больше постоянный
световой поток (чем светлее), тем
значительнее величина тока I
(t)
при измерении, производимом в светлое
время суток, в случае неравенства
интенсивности измерительного потока
и потока сравнения. Чем больше постоянный
световой поток (чем светлее), тем
значительнее величина тока I![]() , наблюдаемого в моменты отсутствия
потока от лампы Л.
На рис.3в представлена зависимость I
, наблюдаемого в моменты отсутствия
потока от лампы Л.
На рис.3в представлена зависимость I![]() от времени в темное время суток. В обоих
случаях световой поток сравнения
превышает измерительный, на рис.3г
изображен ток I
от времени в темное время суток. В обоих
случаях световой поток сравнения
превышает измерительный, на рис.3г
изображен ток I![]() (
t
) в светлое
время суток при равенстве измерительного
потока и потока сравнения.
(
t
) в светлое
время суток при равенстве измерительного
потока и потока сравнения.
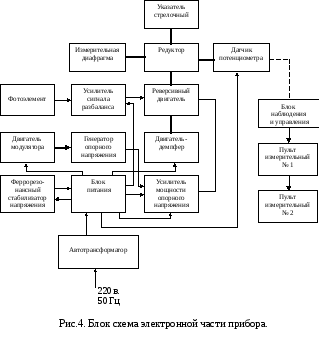
Сигналы с выхода фотоэлемента, осуществляющего преобразование оптических сигналов в электрические, поступают на электронную часть прибора, блок – схема которой приведена на рис.4.
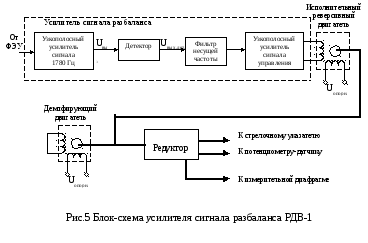
Импульсы напряжения на фотоэлементе имеют очень малую амплитуду. Поэтому они поступают на схему, называемую усилителем сигнала разбаланса. Эта схема усиливает сигнал, поступающий от фотоэлемента, и формирует управляющий сигнал, отличающийся от нуля, если световой поток сравнения не равен измерительному световому потоку. Функциональная схема усилителя сигнала разбаланса и исполнительных устройств представлена на рис.5.
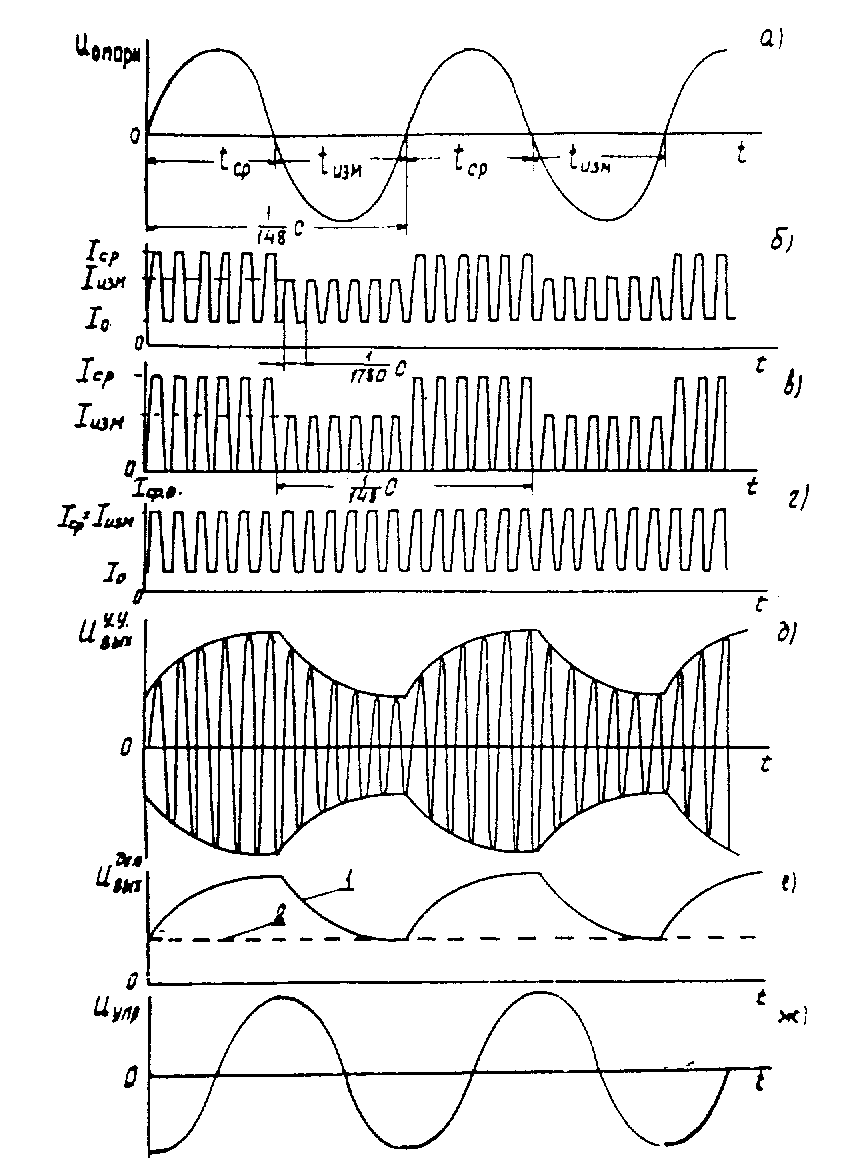
Рис.3. Эпюры
напряжений в различных точках прибора
РДВ-1
Узкополосный
усилитель, на вход которого поступает
напряжение с фотоэлемента, двухкаскадный,
настроенный на частоту 1780 Гц. Если
световой поток сравнения не равен
измерительному световому потоку, то
(рис.3б или 3в) на выходе узкополосного
усилителя напряжение U![]()
![]() будет иметь форму, представленную на
рис.3д. Постоянная составляющая через
узкополосный усилитель не проходит и
поэтому сигнал на выходе не будет
зависеть от величины I
будет иметь форму, представленную на
рис.3д. Постоянная составляющая через
узкополосный усилитель не проходит и
поэтому сигнал на выходе не будет
зависеть от величины I![]() ,
протекающего через фотоэлемент в светлое
время суток. Если световой поток сравнения
равен измерительному, то на выходе
узкополосного усилителя будет наблюдаться
синусоидальное напряжение с постоянной
амплитудой.
,
протекающего через фотоэлемент в светлое
время суток. Если световой поток сравнения
равен измерительному, то на выходе
узкополосного усилителя будет наблюдаться
синусоидальное напряжение с постоянной
амплитудой.
С
выхода узкополосного усилителя сигнал
U![]()
![]() поступает на детектор. При детектировании
выделяется верхняя огибающая сигнала
U
поступает на детектор. При детектировании
выделяется верхняя огибающая сигнала
U![]()
![]() , т.е. сигнал на выходе детектора имеет
форму, представленную на рис. 3е. Если
J
, т.е. сигнал на выходе детектора имеет
форму, представленную на рис. 3е. Если
J![]()
![]() J
J![]() ,
то U
,
то U![]() меняется по величине с периодом (1/148
с) (кривая 1, рис.3е). Если световые потоки
измерительный и сравнения одинаковые,
то U
меняется по величине с периодом (1/148
с) (кривая 1, рис.3е). Если световые потоки
измерительный и сравнения одинаковые,
то U
![]() =U
=U![]() =const
(пунктирная
прямая -, рис.3е).
=const
(пунктирная
прямая -, рис.3е).
Как известно, периодически меняющийся сигнал может быть представлен в виде суммы постоянной составляющей и синусоидальных составляющих, частоты которых в n раз отличаются от частоты изменения сигнала, где n =1,2…С выхода детектора сигнал поступает на фильтр, который задерживает несущую частоту 1780 Гц и пропускает первую гармонику огибающей, имеющую частоту 148 Гц.
Первая
гармоника проходит через фильтр,
задерживаясь на четверть периода. Таким
образом, синусоидальное напряжение,
имеющее частоту 148 Гц, оказывается на
90![]() запаздывающим относительно опорного
напряжения (рис.3ж), если световой поток
сравнения превышает измерительный
световой поток, или на 90
запаздывающим относительно опорного
напряжения (рис.3ж), если световой поток
сравнения превышает измерительный
световой поток, или на 90![]() опережающим опорное при противоположном
соотношении интенсивностей световых
потоков.
опережающим опорное при противоположном
соотношении интенсивностей световых
потоков.
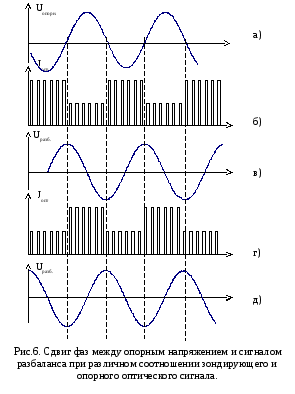
Эти различные соотношения между опорным напряжением (рис.6а ) и сигналом разбаланса (рис 6в и 6д) показаны на рис.6. Чертежи (б-в) и (г-д) показывают, что при обратном соотношении между опорным и зондирующим световыми потоками происходит инверсия сигнала разбаланса.
Это синусоидальное напряжение, возникающее на выходе фильтра, называется управляющим сигналом или сигналом разбаланса. Амплитуда управляющего сигнала отлична от нуля, если поток сравнения не равен измерительному; и равна нулю в противном случае. На выходе фильтра сигнал разбаланса слаб, и он для усиления поступает на узкополосный усилитель, частота максимального усиления которого 148 Гц. Узкополосный усилитель сигнала управления доводит мощность сигнала до величины, достаточной для управления исполнительным реверсивным двигателем (ротор реверсивного двигателя может под воздействием входных сигналов вращаться в обоих направлениях).
Исполнительный электродвигатель имеет две обмотки – управляющую, на которую поступает сигнал с усилителя сигнала управления, и обмотку возбуждения. На обмотку возбуждения постоянно поступает опорное напряжение. Поскольку генератор опорного напряжения имеет малую мощность, то сигнал, вырабатываемый им, поступает на усилитель мощности опорного напряжения и затем на обмотку возбуждения исполнительного электродвигателя.
Направление вращения ротора исполнительного электродвигателя зависит от соотношения фаз между опорным напряжением и сигналом разбаланса. Эти сигналы могут иметь угол сдвига фаз 900, если световой поток сравнения больше измерительного (как это показано на рис.6 б,в), или –900 при противоположном соотношении интенсивностей световых потоков (рис 6 г,д).
Ротор исполнительного двигателя непосредственно связан с редуктором и ротором демпфирующего двигателя. Последний предназначен для создания тормозящего момента, пропорционального скорости вращения ротора. Такое включение демпфирующего двигателя повышает устойчивость работы системы, предотвращая возможность ее перехода в автоколебательный режим. (Для автоколебательного режима характерно периодическое изменение направления вращения ротора исполнительного двигателя, происходящее с частотой, измеряемой десятыми долями или единицами Гц).
Ротор исполнительного двигателя приводит в движение:
1. Измерительную диафрагму, в результате чего меняется величина светового потока сравнения.
2.Стрелочный указатель, перемещающийся вдоль шкалы, проградуированной в единицах метеорологической дальности видимости (километрах) и в процентах ослабления светового потока, проходящего двухсотметровый слой атмосферы.
Ползунок потенциометра датчика, предназначенного для дистанционного измерения и регистрации метеорологической дальности видимости.
Вращение ротора реверсивного электродвигателя происходит до тех пор, пока световой поток сравнения не станет равным измерительному потоку. При равенстве этих потоков управляющих напряжение станет равным нулю и двигатель остановится.