Теорема об изменении кинетического момента системы относительно неподвижной оси
Формулировка
теоремы: производная по времени от
кинетического момента системы относительно
неподвижной оси ![]() равна
сумме моментов всех внешних сил
относительно этой оси, т. е.
равна
сумме моментов всех внешних сил
относительно этой оси, т. е.
![]() .
.
31. Элементарная работа силы; ее аналитическое выражение. Работа силы на конечном пути. Работа силы тяжести, силы упругости и силы тяготения. Мощность. Кинетическая энергия материальной точки.
Элементарная работа силы - работа силы при малом перемещении тела.
Введём
сначала понятие об элементарной работе
силы на бесконечно малом перемещении ds.
Элементарной работой силы ![]() (рис.16)
называется скалярная величина:
(рис.16)
называется скалярная величина:
![]() ,
,
где ![]() -
проекция силы
-
проекция силы![]() на
касательную к траектории, направленную
в сторону перемещения точки, а
на
касательную к траектории, направленную
в сторону перемещения точки, а![]() -бесконечно
малое перемещение точки, направленное
вдоль этой касательной.
-бесконечно
малое перемещение точки, направленное
вдоль этой касательной.
Данное
определение соответствует понятию о
работе, как о характеристике того
действия силы, которое приводит к
изменению модуля скорости точки. В самом
деле, если разложить силу ![]() на
составляющие
на
составляющие![]() и
и![]() ,
то изменять модуль скорости точки будет
только составляющая
,
то изменять модуль скорости точки будет
только составляющая![]() ,
сообщающая точке касательное ускорение
Составляющая же
,
сообщающая точке касательное ускорение
Составляющая же![]() или
изменяет направление вектора
скоростиv(сообщает
точке нормальное ускорение), или, при
несвободном движение изменяет
давление на связь. На модуль скорости
составляющая
или
изменяет направление вектора
скоростиv(сообщает
точке нормальное ускорение), или, при
несвободном движение изменяет
давление на связь. На модуль скорости
составляющая ![]() влиять
не будет, т.е., как говорят, сила
влиять
не будет, т.е., как говорят, сила ![]() «не
будет производить работу».
«не
будет производить работу».
Замечая,
что ![]() ,
получаем:
,
получаем:
![]() . (1)
. (1)
Таким
образом, элементарная работа силы равна
проекции силы на направление перемещения
точки, умноженной на элементарное
перемещение ![]() или
элементарная работа силы равна
произведению модуля силы на элементарное
перемещение
или
элементарная работа силы равна
произведению модуля силы на элементарное
перемещение![]() и
на косинус угла между направлением силы
и направлением перемещения.
и
на косинус угла между направлением силы
и направлением перемещения.
Если
угол ![]() острый,
то работа положительна. В частности,
при
острый,
то работа положительна. В частности,
при![]() элементарная
работа
элементарная
работа![]() .
.
Если
угол ![]() тупой,
то работа отрицательна. В частности,
при
тупой,
то работа отрицательна. В частности,
при![]() элементарная
работа
элементарная
работа![]() .
.
Если
угол ![]() ,
т.е. если сила направлена перпендикулярно
перемещению, то элементарная работа
силы равна нулю.
,
т.е. если сила направлена перпендикулярно
перемещению, то элементарная работа
силы равна нулю.
Найдем
аналитическое выражение элементарной
работы. Для этого разложим силу ![]() на
составляющие
на
составляющие![]() ,
,![]() ,
,![]() по
направлениям координатных осей (рис.17;
сама сила
по
направлениям координатных осей (рис.17;
сама сила![]() на
чертеже не показана).
на
чертеже не показана).

Рис.17
Элементарное
перемещение ![]() слагается
из перемещений
слагается
из перемещений![]() ,
,![]() ,
,![]() вдоль
координатных осей, гдеx,
y, z -
координаты точки М.
Тогда работу силы
вдоль
координатных осей, гдеx,
y, z -
координаты точки М.
Тогда работу силы ![]() на
перемещении
на
перемещении![]() можно
вычислить как сумму работ её
составляющих
можно
вычислить как сумму работ её
составляющих![]() ,
,![]() ,
,![]() на
перемещениях
на
перемещениях![]() ,
,![]() ,
,![]() .
.
Но
на перемещении ![]() совершает
работу только составляющая
совершает
работу только составляющая![]() ,
причем её работа равна
,
причем её работа равна![]() .
Работа на перемещениях
.
Работа на перемещениях![]() и
и![]() вычисляется
аналогично. Окончательно
находим:
вычисляется
аналогично. Окончательно
находим:![]() .
.
Формула дает аналитическое выражение элементарной работы силы.
Работа силы тяжести

![]()
Работа силы упругости — работа, совершаемая силой упругости при изменении деформации пружины от некоторого начального значения x1 до конечного значения x2
![]()
Вывод формулы работы силы упругости ( через интеграл )
Коэффициент жесткости пружины k называется жесткостью тела, он зависит от материала, из которого тело изготовлено, а также от его геометрических размеров и формы. Жесткость выражается в ньютонах на метр (Н/м). Сила упругости зависит только от изменения расстояний между взаимодействующими частями данного упругого тела. Работа силы упругости не зависит от формы траектории и при перемещении по замкнутой траектории равна нулю. Поэтому силы упругости является потенциальными силами.
Мо́щность — физическая величина, равная в общем случае скорости изменения, преобразования, передачи или потребления энергии системы. В более узком смысле мощность равна отношению работы, выполняемой за некоторый промежуток времени, к этому промежутку времени
Тензор момента инерции системы и твердого тела. Главные оси инерции. Радиус инерции. Теорема о моментах инерции относительно параллельных осей. Основные моменты инерции некоторых тел.
Если два центробежных момента инерции , содержащие в обозначениях общий индекс некоторой оси , равны нулю , то эта ось называется главной осью инерции тела. Например , если имеем
Jxz = Jyz = 0, то ось z является главной осью инерции в точке O. Если равны нулю все три центробежных момента инерции , то все три оси являются главными.
Существует теорема , которая устанавливает , что в каждой точке тела можно найти как минимум три главные оси инерции. Главные оси , построенные в центре масс тела , называются главными центральными осями инерции , а моменты инерции относительно этих осей - главными центральными моментами инерции.
Теорема о моментах инерции твёрдого тела относительно параллельных осей.
Момент инерции твердого тела относительно некоторой оси равен моменту инерции тела относительно параллельной оси проходящей через его центр масс, сложенному с произведением массы тела на квадрат расстояния между осями. Допустим, что задана осьOz1. Для доказательства теоремы проведём через центр масс тела С три взаимно перпендикулярные оси, из которых ось Сz параллельна заданной оси Oz1, а ось Су лежит в плоскости параллельных осей Сz и Oz1 (рис а, в). Обозначим d – расстояние между осямиCz и Oz1. для вычисления моментов инерции тела относительно осей Cz и Oz1 опустим из каждой точки Mi рассматриваемого тела перпендикуляры ri и hi на оси Cz и Oz1. Выразим длины этих перпендикуляров через координаты этих точек:
ri2 = xi2 + yi2, hi2 = xi2 + (yi – d)2 = xi2 + yi2 + d2 – 2yid = ri2 + d2 – 2yid. (a)
Определим моменты инерции тела относительно осей Cz и Oz1:
JCz = ∑ miri2, Jz1 = ∑ mihi2.
Применив зависимость (а): Jz1 = ∑ miri2 + ∑ mid2 – 2∑miyid. (в)
Здесь ∑ mi = m. – масса тела. Из формулы yc = ∑ miyi/m, получим:
∑ miyi = myc, так как yc = 0, то ∑miyi = 0. Подставляя это значение в равенство (в), получаем зависимость, установленную теоремой:
Jz1 = Jcz + md2 . (г). Формула (г) показывает, что из совокупности паралельных осей ось, проходящая через центр масс тела, характеризуется наименьшим моментом инерции. Полярный момент тв. тела относительно центра масс: Jc = ½ * (Jcx + Jcy + Jcz). Отсюдаследут, что ценр масс тела явл. полюсом, относительно которго полярный момент инерции тела имеет наименьшее возможное значение.
Воспользуемся формулой (г) для установления зависимости между радиусами инерции твёрдого тела icz и iz1 относительно осей Cz и Oz1.
Jz1 = miz12, Jcz = micz2, тогда miz12 = mcz2 + md2, откуда iz12 = icz2 + d2.
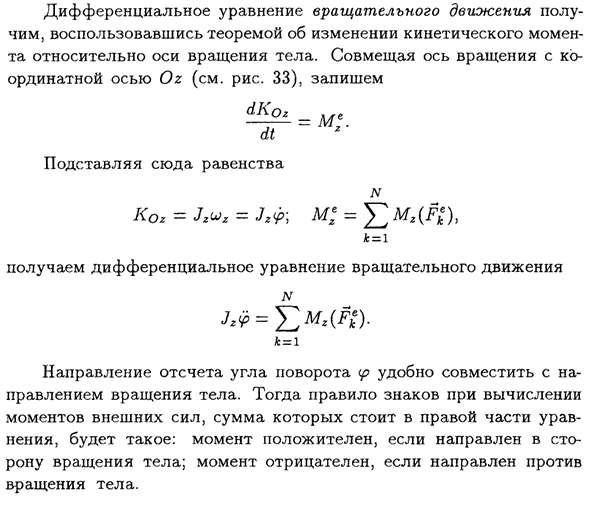
Дифференциальное уравнение вращательного движения твердого тела вокруг неподвижной оси.

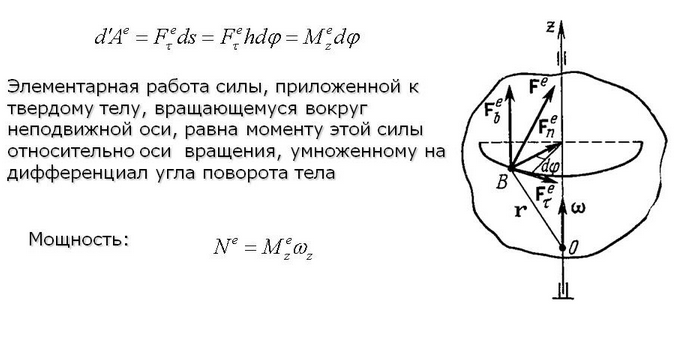
Кинетическая энергия механической системы. Вычисление кинетической энергии твердого тела в различных случаях его движения. Работа и мощность сил, приложенных к твердому телу, вращающемуся вокруг неподвижной оси.
КИНЕТИЧЕСКАЯ ЭНЕРГИЯ МЕХАНИЧЕСКОЙ СИСТЕМЫ
Кинетическая энергия системы складывается из кинетических энергий точек и тел, входящих в эту систему.
Кинетическая
энергия точки массы m,
движущейся со скоростью ![]() ,
,
 .
(1)
.
(1)
Кинетическая энергия твердого тела вычисляется по формулам:
– при поступательном движении
 ,
(2)
,
(2)
где M – масса тела; V – скорость какой-либо точки тела (напомним, что при поступательном движении тела скорости всех точек одинаковы);
– при вращении вокруг неподвижной оси z
 ,
(3)
,
(3)
где Jz – момент инерции массы тела относительно оси вращения; – угловая скорость тела;
– при плоскопараллельном движении
 ,
(4)
,
(4)
где M –
масса тела; VC –
скорость центра масс; ![]() –
момент инерции массы тела относительно
осиzC,
проходящей через центр масс C
перпендикулярно
плоскости движения; –
угловая скорость тела.
–
момент инерции массы тела относительно
осиzC,
проходящей через центр масс C
перпендикулярно
плоскости движения; –
угловая скорость тела.
В системе с одной степенью свободы скорости разных точек и угловые скорости тел в формулах (1)…(4) выражаются через одну какую-либо скорость. Для этого надо учитывать известные кинематические зависимости между скоростями в движущихся системах [2].