

3. Дополнительные каналы приема
Причиной появления дополнительных каналов являются высшие гармоники крутизны электронного прибора смесителя. По этим каналам возможно прохождение помех и шумов, поступающих как от антенно-фидерного устройства, так и от гетеродина.
Для ослабления влияний этих каналов:
— используют участки с линейной зависимостью крутизны электронного прибора смесителя от гетеродинного напряжения;
— повышают избирательность преселектора.
29. Двухдетекторный приемник
30. Схема комбинированной системы ару
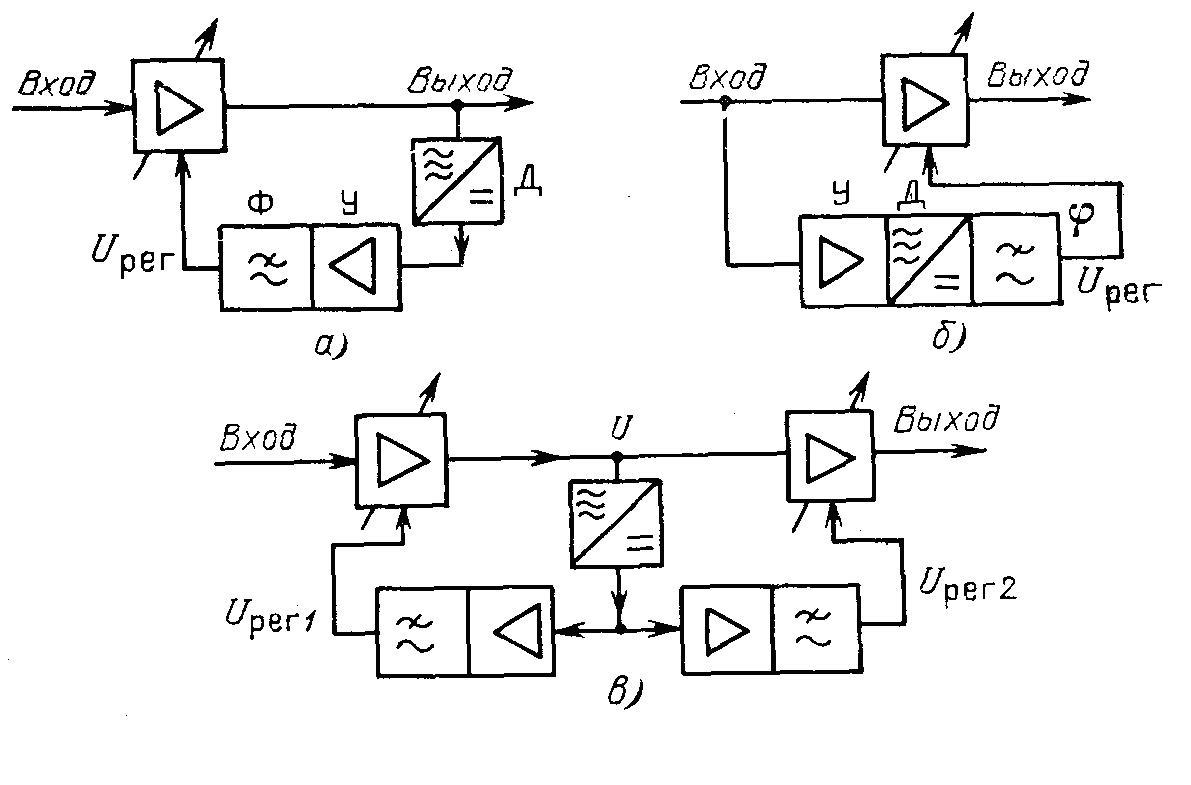
Основная регулировка — обратная. Регулируемый усилитель делится на две секции, причем усиление сосредоточено в основном в каскадах первой секции, усиление же второй секции невелико. В эту секцию может быть выделен, например, последний усилительный каскад.
Регулирующее напряжение Uрег1 формируется путем выпрямления напряжения с выхода первой секции и осуществляет обратную регулировку усиления. Требования к качеству регулировки здесь не очень высоки, т. е. допускается сравнительно сильное (например, в несколько раз) изменение напряжения U на выходе первой секции. Это упрощает реализацию регулировки. В то же время напряжение U используется для создания второго регулирующего напряжения Uрег2 и служит для прямой регулировки усиления второй секции. Поскольку на нее возлагается задача изменять усиление лишь в несколько раз, расхождение теоретического и реального законов регулирования не приведет к сильному непостоянству напряжения сигнала на выходе второй секции. Кроме того, в цепи АРУ используется сигнал, уже усиленный в первой секции, т. е. не требуется дополнительного усилителя с большим коэффициентом усиления, который необходим в предыдущем случае.
31. Упч: общие сведения
Усилитель промежуточной частоты (УПЧ) – каскад радиоприемника, расположенный между преобразователем частоты и детектором и предназначенный для усиления сигналов на промежуточной частоте до уровня, обеспечивающего нормальную работу детектора, а также для осуществления окончательной селекции принимаемого радиосигнала. УПЧ определяет полосу пропускания додетекторного тракта и обеспечивает избирательность приемника по соседнему каналу приема. Задачи, решаемые УПЧ:
основное усиление сигнала в РПМУ;
обеспечение избирательности по соседнему каналу;
снижение коэффициента шума РПМУ, при отсутствии УРЧ;
Подавление комбинационных частот на выходе преобразователя частоты и гармоник частоты гетеродина.
В супергетеродинных приемниках в качестве усилителей промежуточной частоты применяются неперестраиваемые резонансные усилители, называемые полосовыми, и в ряде случаев, апериодические усилители. Полосовой усилитель – усилитель с АЧХ близкой по форме к прямоугольной, работающий на фиксированной частоте и имеющий в качестве нагрузки систему связанных или одиночных, соответствующим образом настроенных контуров
Классификация УПЧ проводится по следующим признакам:
По типу УП – ламповые, транзисторные, на ИМС;
По относительной ширине полосы пропускания – узкополосные (П<0.05 – 0.07fпр) и широкополосные (П> 0.07fпр);
По способу обеспечения избирательности – с распределенной или с сосредоточенной избирательностью;
По виду избирательной системы- с одиночными контурами (настроенными или расстроенными), со связанными контурами, со смешанными контурами и с фильтрами сосредоточенной селекции ФСС.
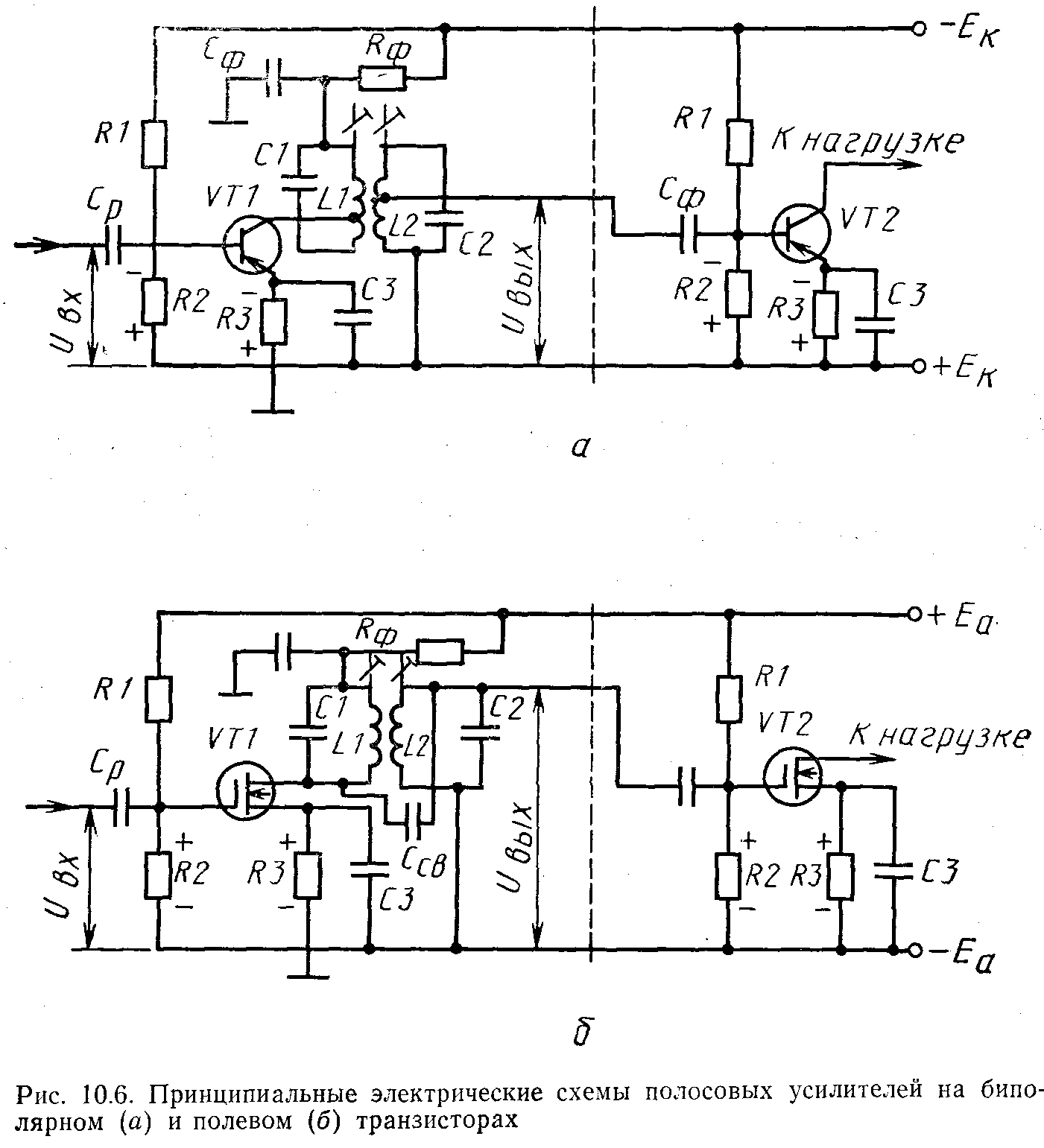
Рис. 3.40. Принципиальные схемы полосовых усилителей на биполярном (а) и полевом (б) транзисторах
. Представим полосовой
усилитель, показанный на рис. 3.40, а,
в виде
эквивалентной схемы (рис. 3.41, а).
На этой схеме
Y21Uвх
– генератор тока эквивалентный УШ; C1,
g1,
L1
– собственные параметры первого контура;
С2,
g2,
L2
– собственные параметры второго контура;
 – выходные проводимость и емкость УШ;
– выходные проводимость и емкость УШ; – входные проводимость и емкость УП2;p1,
p2
— коэффициенты включения.
– входные проводимость и емкость УП2;p1,
p2
— коэффициенты включения.

Рис. 3.41. Эквивалентные схемы полосового усилителя (а – г) и д - его амплитудно-частотная характеристика.
32. Балансный детектор: общие сведения
 Балансный
детектор представляет соединение
небалансных, так что выходные напряжения
образуют разность продетектированных
сигналов.
Балансный
детектор представляет соединение
небалансных, так что выходные напряжения
образуют разность продетектированных
сигналов.
33. Методика исследования динамического диапазона УРЧ
Где min - чувствительность
Max – граница линейного участка
34. ФСС: назначение, типы, параметры, характеристики
В современных приемниках для улучшения избирательности по соседнему каналу часто применяют фильтры сосредоточенной селекции (ФСС). В качестве ФСС используются:
– многозвенные LC–фильтры;
– пьезоэлектрические фильтры;
– электромеханические фильтры;
– пьезомеханические фильтры;
– акустоэлектронные фильтры.
Фильтр включают между преобразователем частоты и первым каскадом УПЧ, что улучшает многосигнальную избирательность приемника, снижая вероятность возникновения в УПЧ нелинейных явлений (блокирование, перекрестная и взаимная модуляции).
Рассмотрим основные качественные показатели преобразователя частоты с ФСС.
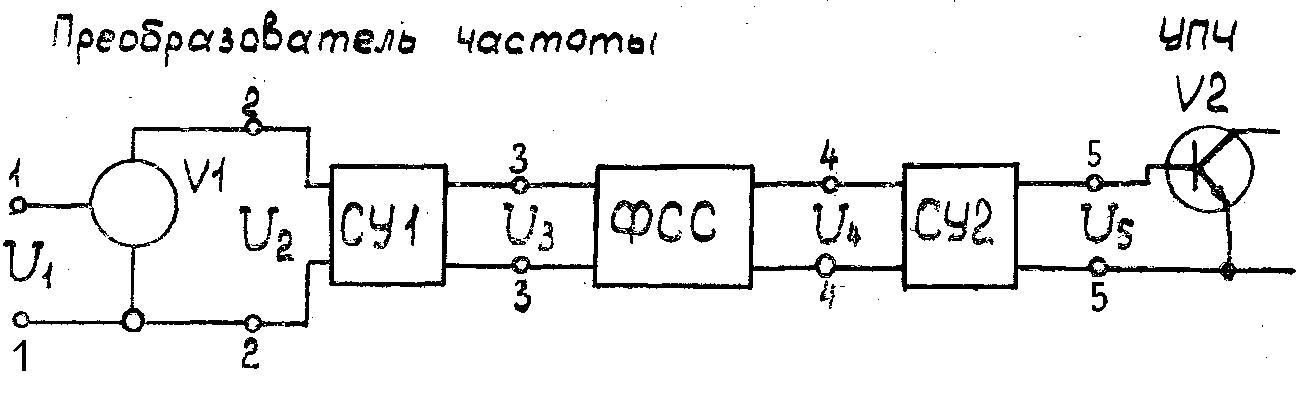
Рис. 3.19. Обобщенная схема преобразователя частоты с фильтром сосредоточенной селекции
Обобщенная схема преобразователя частоты с ФСС показана на рис. 3.19. Она состоит из электронного прибора смесителя V1, собственно ФСС, входного (СУ1) и выходного (СУ2) согласующих устройств. СУ1 служит для согласования выходной проводимости g22п преобразователя частоты с входным характеристическим сопротивлением ρl ФСС и входной проводимости УПЧ g11c с выходным характеристическим сопротивлением ρi фильтра. Согласование необходимо для нормального функционирования ФСС и для оптимальной передачи сигнала с выхода преобразователя частоты на вход УПЧ. Способы согласования определяются величиной произведений ρlg22п, ρig11c, шириной полосы пропускания фильтра Пф и необходимой точностью согласования.
Рассмотрим согласующие устройства для наиболее распространенных случаев. У электронных ламп и полевых транзисторов проводимости g22п, g11с малы (ρlg22п«1, ρig11п«1). В качестве согласующих устройств применяются резисторы Ri, Rl (рис. 3.20,а). Условия согласования имеют вид:


Отсюда
 ;
; .
.
У биполярных транзисторов проводимости g22п, g11c велики и обычно ρlg22п>1, ρig11п>1.
Методика согласования
зависит от ширины полосы пропускания
фильтра Пф.
При
 в качестве согласующих устройств
используют широкополосные трансформаторы
сопротивлений (рис. 3.20,б),
параллельные колебательные контуры
(рис. 3.20,в)
и несимметричные трансформаторные Т
или П-образные полузвенья LC-фильтров.
Последний способ характерен для случая
в качестве согласующих устройств
используют широкополосные трансформаторы
сопротивлений (рис. 3.20,б),
параллельные колебательные контуры
(рис. 3.20,в)
и несимметричные трансформаторные Т
или П-образные полузвенья LC-фильтров.
Последний способ характерен для случая
 .
.
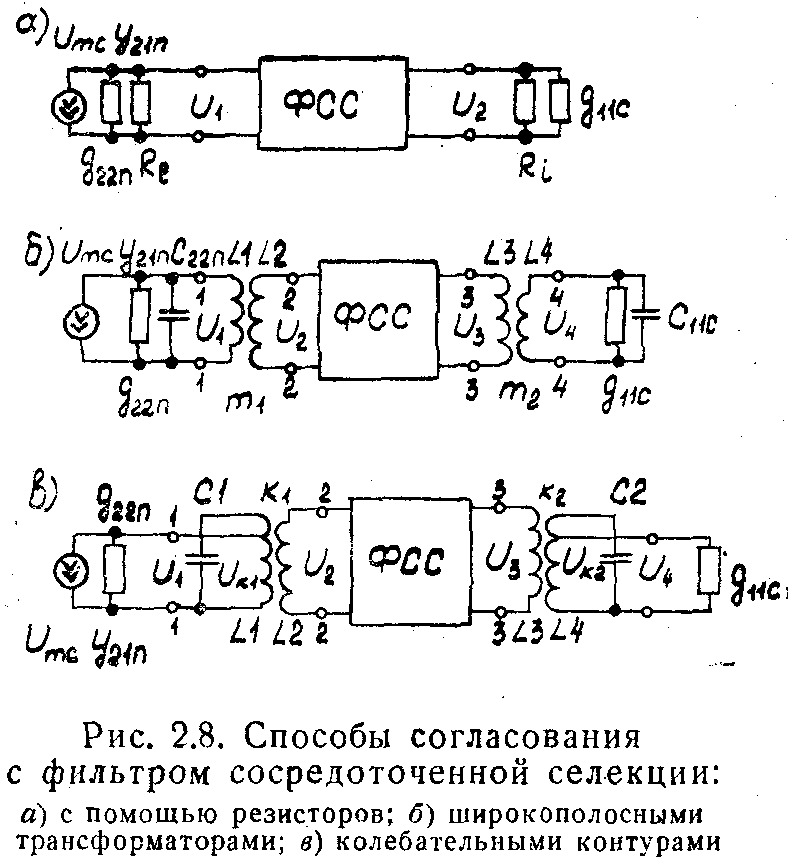
Рис. 3.20. Способы согласования с фильтром сосредоточенной селекции: а) с помощью резисторов; б) широкополосными трансформаторами; в) колебательными контурами.
Коэффициенты трансформации широкополосных трансформаторов (рис. 3.20,б) определяются из условий согласования:


откуда:

 .
.
Коэффициент усиления напряжения преобразователя частоты
 ,
,
где
 –
коэффициент передачи фильтра;
–
коэффициент передачи фильтра;
 –усилительный
потенциал преобразователя частоты.
–усилительный
потенциал преобразователя частоты.
Индуктивности L1, L4 выбираются так, чтобы контуры L1, C22п, L4, C11c были настроены на промежуточную частоту fп. Колебательные контуры L1C1, L2C2 (рис. 3.20,в) также настроены на частоту fп (емкости С22п, С11с учтены в С1 и С2) и обеспечивают дополнительную избирательность УПЧ на частоте гетеродина, что важно при использовании пьезоэлектрических фильтров и акустоэлектронных фильтров.
Эквивалентные затухания контуров
 ,
,
где fг, σг – частота гетеродина и необходимая избирательность на этой частоте до ФСС.
36. РПУ с двойным ПЧ (для устранения зеркального канала)
37. Методика исследования АЧХ преселектора
38. Детекторы: общие сведения
Детектор – каскад радиоприемника, в котором осуществляется преобразование (детектирование) входных модулированных колебаний в колебания модулирующего сигнала. В зависимости от вида модуляции в радиоприемнике осуществляется амплитудное, частотное или фазовое детектирование.
Детекторы широко используются в приемниках различного назначения, в средствах измерений, в системах автоматической регулировки усиления и автоматической подстройки частоты гетеродинов и других электронных устройствах.
Для детектирования применяются транзисторы (биполярные, полевые) и полупроводниковые диоды. Если ко входу амплитудного детектора подвести сигналы высокой частоты, модулированные по амплитуде, то на выходе устройства возникнут колебания низкой частоты, форма которых будет повторять форму огибающей модулированного колебания (рис. 4.1, а). При приеме сигналов радиовещательной станции на выходе детектора возникнут колебания низкой частоты, которые в конце приемного тракта с помощью телефона или громкоговорителя будут преобразовываться в звуковые колебания. В приемниках, работающих в телеграфном режиме, на выходе детектора получаются телеграфные сигналы, которые после усиления поступают на оконечное устройство для воспроизведения.
В современных приемниках чаще всего применяется диодное детектирование. Основы теории детектирования АМ сигналов изучались в курсе «Теория электрической связи», поэтому здесь ограничимся изложением кратких результатов. Фундаментальный аналитический анализ режимов работы АМ детектора приведен в базовом учебнике [1], который рекомендуется всем студентам как основной источник для самостоятельной работы.
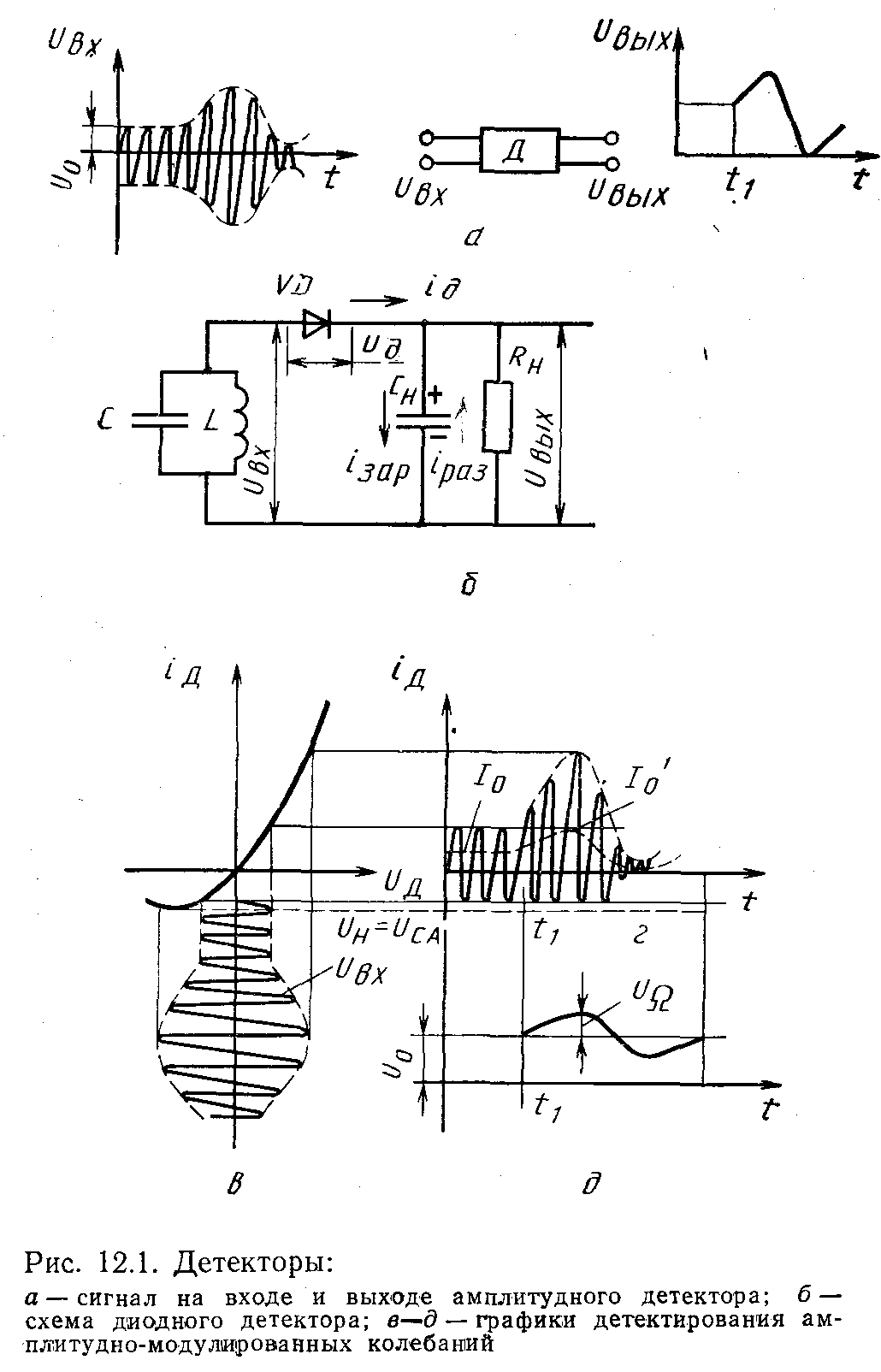
Рис. 4.1. Детекторы: а – сигнал на входе и выходе амплитудного детектора; б – схеме диодного детектора; в,г, д – графики детектирования амплитудно-модулированных колебаний.
Схема диодного детектора (рис. 4.1, б) состоит из полупроводникового диода VD, нагрузки Rн и конденсатора Сн. При подаче на вход детектора, как нелинейного элемента, напряжения высокой частоты с постоянной амплитудой Umωcos ωt, в цепи диода возникает пульсирующий ток, высота импульсов которого будет постоянной во времени.
Последовательность импульсов тока детектора можно представить рядом Фурье в виде суммы постоянной и переменной составляющих
i = I0 + Im1cos ωt + Im2cos 2ωt+ Im3cos 3ωt+…+ Imncos nωt (4.1)
Известно также, что i = gu, причем g = gпр – gобр, т.е. ток диода зависит от напряжения на нем: uω = Uω + U0. Изменение напряжения u, приложенного к диоду, будет вызывать соответствующие изменения его тока i.
При подаче на вход
детектора (рис. 4.1, в)
напряжения
модулированного сигнала, амплитуда
которого изменяется по закону Umω(1+m
sin
Ωt),
пульсирующий ток i
детектора также будет изменяться с
частотой Ω
(рис. 4.1, г).
Увеличение
амплитуды входного напряжения вызовет
соответствующее увеличение импульсов
тока и, как следствие, увеличение
постоянной составляющей тока до величины
 .
Приращение постоянной составляющей
.
Приращение постоянной составляющей является проявлением полезного эффекта
детектирования. Изменение постоянной
составляющей дает соответствующее
изменение выпрямленного напряжения на
конденсатореCн
и, следовательно, на резонаторе Rн.
При изменении амплитуды по закону низкой
частоты Ω
по такому же закону будет изменяться и
приращение постоянной составляющей
тока ∆I0,
которое и обусловит ток частоты модуляции
IΩ.
Напряжение на нагрузке детектора uн
= uc
также будет отражать закон модуляции
входного сигнала (рис. 4.1, д).
uн
= U0
+ uΩ.
является проявлением полезного эффекта
детектирования. Изменение постоянной
составляющей дает соответствующее
изменение выпрямленного напряжения на
конденсатореCн
и, следовательно, на резонаторе Rн.
При изменении амплитуды по закону низкой
частоты Ω
по такому же закону будет изменяться и
приращение постоянной составляющей
тока ∆I0,
которое и обусловит ток частоты модуляции
IΩ.
Напряжение на нагрузке детектора uн
= uc
также будет отражать закон модуляции
входного сигнала (рис. 4.1, д).
uн
= U0
+ uΩ.
Емкость конденсатора Cн выбирается такой, чтобы сопротивление конденсатора Cн токам высокой частоты было во много раз меньше сопротивления нагрузки детектора Rн, а его сопротивление токам низкой частоты значительно больше сопротивления Rн:1/ωC << Rн; 1/ΩC >> Rн.
Следует помнить, что ток i – пульсирующий. Амплитуда пульсаций будет тем меньше, чем больше постоянная времени цепи разряда конденсатора τраз по сравнению с периодом несущей частоты T0 = 1/f0, т.е. τраз > T0.
В то же время должны сохраняться пульсации, частота которых равна наибольшей частоте модуляции Fв и всех более низких частот модуляции, т.е. τраз < TΩmin – 1/F, где TΩmin – минимальный период колебаний модулирующего сигнала. Следовательно, необходимо выполнять условие T0 < τраз < TΩmin. Выделенное на нагрузке Rн напряжение низкой частоты через разделительный конденсатор Cp передается во входную цепь последующего каскада. Чтобы потери при передаче были минимальными, необходимо придерживаться следующего соотношения 1/ΩC << Rвх.
Требования, предъявляемые к детектору:
напряжение модулирующего сигнала на выходе детектора должно быть возможно больше;
влияние детектора на усилительные и избирательные свойства предыдущего и последующего каскада должно быть минимальным;
напряжение высоких частот (несущей и промежуточной) на выходе детектора должно быть минимальным;
искажения при детектировании (частотные и нелинейные) должны быть возможно меньшими.
Электрические свойства детектора оцениваются следующими основными качественными показателями: формой детекторной характеристики, коэффициентом передачи напряжения, коэффициентом гармоник, коэффициентом частотных искажений и коэффициентом фильтрации. Важный качественный показатель – входное сопротивление детектора.
Детекторная характеристика – это зависимость приращения постоянной составляющей тока ∆I0 в цепи нагрузки детектора от амплитуды входного напряжения Uвх (рис. 4.2). Начальный участок характеристики криволинейный. Он соответствует сравнительно малым значениям входного напряжения (до 0,3 – 0,5 В).
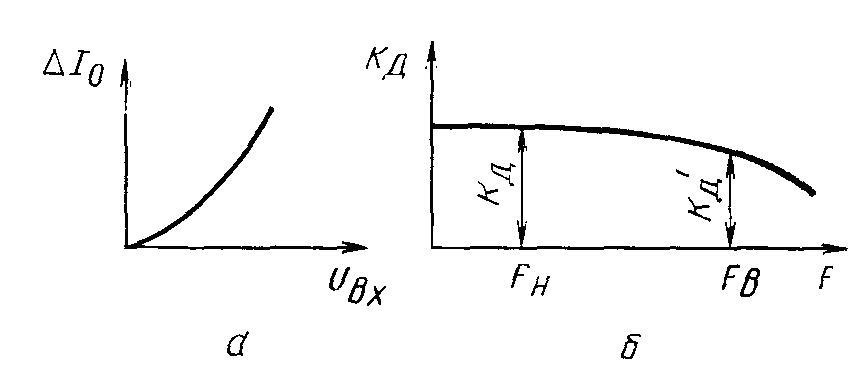
Рис.4.2. Характеристика диодного детектора:
а – детекторная; б – частотная.
Далее характеристика становится прямолинейной, что говорит о том, что коэффициент передачи напряжения за пределами Uвх > 0,3 – 0,5 В почти не зависит от амплитуды входного напряжения.
Коэффициент передачи напряжения – это отношение амплитуды напряжения низкой частоты на выходе детектора UmΩ к амплитуде высокочастотного промодулированного напряжения на его входе mUmω
KД = UmΩ/mUmω, (4.2)
где m – коэффициент амплитудной модуляции. Чем больше значение коэффициента KД, тем больше напряжение низкой частоты на выходе детектора при неизменных напряжении высокой частоты и коэффициенте модуляции.
Коэффициент гармоник КГ позволяет оценивать степень нелинейных искажений, которым подвергается сигнал, проходя через детектор. КГ – это отношение эффективного значения напряжения всех гармоник (в %), входящих в спектр сигнала, за исключением первой, к эффективному значению напряжения первой гармоники
 (4.3)
(4.3)
Коэффициент гармоник измеряется измерителями нелинейных искажений, например, типа С6-5.
Коэффициент частотных искажений
 (4.4)
(4.4)
где KД
и
 – коэффициент передачи напряжения для
более низких и более высоких частот
соответственно. Зависимость модуля
коэффициента передачи напряженияKД
от частоты дает частотную
характеристику детектора,
которая позволяет оценивать частотные
искажения сигнала.
– коэффициент передачи напряжения для
более низких и более высоких частот
соответственно. Зависимость модуля
коэффициента передачи напряженияKД
от частоты дает частотную
характеристику детектора,
которая позволяет оценивать частотные
искажения сигнала.
Коэффициент фильтрации – это отношение напряжения Umω вых высокой частоты на выходе к напряжению Umω вх той же частоты на входе
Кф = Umω вых/ Umω вх (4.5)
Значение Кф,
должно быть минимальным. Требование
минимального значения напряжения
высокой частоты на выходе детектора
связано с нарушением режима работы
последующего каскада вследствие
попадания высокочастотных токов в его
усилительные элементы. Чем меньше
коэффициент фильтрации, тем меньше
высокочастотное напряжение на выходе
детектора. Достаточным считается

Входное сопротивление шунтирует контур предыдущего каскада (усилителя высокой частоты в приемниках прямого усиления или усилителя промежуточной частоты в супергетеродинных приемниках). Это своеобразный шунт, через который ответвляется часть энергии сигнала. Если допустить, что входное сопротивление детектора равно нулю, то сигнал «замкнется накоротко» и не выделится в его нагрузке.
С увеличением входного сопротивления (уменьшением входной проводимости) шунтирующее действие детектора уменьшается, что равносильно сохранению избирательных свойств контура предыдущего каскада, уменьшению потребляемой детектором мощности.
Входное сопротивление
Rвх = 1/gвх = Umω вх/IДω (4.6)
Входная потребляемая детектором мощность это активная мощность, выделяемая на входном сопротивлении детектора:
Рвх = (1/2) U2mω вх/Rвх = (1/2) U2mω вхgвх (4.7)
39. Нелинейные эффекты в радиоприемниках
Интерференционные свисты
возникают, если сигнал, подлежащий
преобразованию ,
имеет чрезмерно большую амплитуду и
по отношению к нему начинают проявляться
нелинейные свойства электронного
прибора. По отношению, к такому сигналу
смеситель ведет себя как умножитель
частоты. Принимая во внимание, что
,
имеет чрезмерно большую амплитуду и
по отношению к нему начинают проявляться
нелинейные свойства электронного
прибора. По отношению, к такому сигналу
смеситель ведет себя как умножитель
частоты. Принимая во внимание, что
 (3.9)
(3.9)
из третьего и четвёртого слагаемых выражения (3.8) видим, что в выходном токе появятся компоненты:
– из третьего слагаемого
 (3.10)
(3.10)
– из четвертого слагаемого
 (3.11)
(3.11)
Очевидно, что в полосу пропускания УПЧ
могут попасть лишь составляющие с
частотами
 и
и .
Компонент с частотой
.
Компонент с частотой приn=lдает сигнал промежуточной частоты.
Указанные компоненты соответственно
будут равны:
приn=lдает сигнал промежуточной частоты.
Указанные компоненты соответственно
будут равны:
 (3.12)
(3.12)
 (3.13)
(3.13)
 (3.14)
(3.14)
Если частоты
 ,
, лежат в пределах полосы пропускания
УПЧ-П, то они усиливаются им и наряду с
основным сигналом поступают на детектор,
который работает как преобразователь
частоты. В результате на нагрузке
детектора выделяются разностные по
частоте напряжения, представляющие
собой помехи основному полезному
сигналу. Если частоты последних лежат
в пределах полосы пропускания тракта
звуковой частоты радиовещательного
или связного приемника, то они
прослушиваются в виде звуковых
сигналов-свистов, что определило название
этой разновидности нелинейных явлений.
лежат в пределах полосы пропускания
УПЧ-П, то они усиливаются им и наряду с
основным сигналом поступают на детектор,
который работает как преобразователь
частоты. В результате на нагрузке
детектора выделяются разностные по
частоте напряжения, представляющие
собой помехи основному полезному
сигналу. Если частоты последних лежат
в пределах полосы пропускания тракта
звуковой частоты радиовещательного
или связного приемника, то они
прослушиваются в виде звуковых
сигналов-свистов, что определило название
этой разновидности нелинейных явлений.
Интерференционные свистыпредставляют собой помехи, возникающие внутри приемника. Они ухудшают отношение сигнал/шум и чувствительность радиоприемного устройства.
Из соотношений (3.12) и (3.14) вытекают способы уменьшения помехи:
1) уменьшение уровня сигнала на входе электронного прибора за счет регулировки усиления (ручной и автоматической) в УВЧ;
2) использование двухсеточного или
двухзатворного смесителя. Режим
электронного прибора по управляющей,
сигнальной сетке или по сигнальному
затвору выбирается так, чтобы рабочий
участок проходной характеристики f(u)
по этому электроду был линейным
(i=i0+SΔu).
Тогда ,
, ,
, .
.
Нелинейные искажения огибающей
амплитудно-модулированного
сигнала определяются нелинейными членами
выражения (3.8), имеющими промежуточную
частоту ωп. Компонент частоты ωп,
как видно из выражений (3.10) и (3.11), дает
только четвертое слагаемое (3.11) приn=1
и он определяется выражением (3.14).
определяются нелинейными членами
выражения (3.8), имеющими промежуточную
частоту ωп. Компонент частоты ωп,
как видно из выражений (3.10) и (3.11), дает
только четвертое слагаемое (3.11) приn=1
и он определяется выражением (3.14).
Таким образом, полезная составляющая выходного тока смесителя будет
 .
.
Пусть амплитуда Umc(t)
изменяется по косинусоидальному закону.
Подставляя сюда вместоUmcвыражение ,
найдем закон изменения амплитуды
выходного тока смесителя:
,
найдем закон изменения амплитуды
выходного тока смесителя:
 (3.15)
(3.15)
где Im0– амплитуда несущей;
I1Ω,I2Ω,I3Ω– амплитуды первой, второй и третьей гармоник тока:
 ;
; ;
; (3.16)
(3.16)
Пренебрегая малой амплитудой третьей гармоники тока, найдем коэффициент гармоник:
 (3.17)
(3.17)
Из выражений (3.16) и (3.17) вытекают следующие способы уменьшения искажений:
– уменьшение уровня сигнала на входе смесителя путем использования в УВЧ регулировок усиления;
– использование такого режима электронного
прибора смесителя, при котором рабочий
участок проходной динамической
характеристики имеет квадратический
характер ( ):
):
 (3.18)
(3.18)
Эффект блокирования проявляется
в изменении уровня полезного сигнала
на выходе преобразователя частоты под
воздействием сильной помехи. Полоса
пропускания преселектора приемника
обычно значительно шире, чем УПЧ. Поэтому
на вход электронного прибора смесителя
могут попадать напряжения сильных
помех, несущие частоты которых
преобразованные смесителем, лежат за
пределами полосы пропускания УПЧ, т. е.
непосредственного прохождения помехи
через приемник не наблюдается. Однако
напряжение помехи, как и напряжение
гетеродина, изменяет крутизну электронного
прибора смесителя, что влияет на
прохождение через него полезного
сигнала. Явление получило название,
«блокирование». В чистом виде оно
наблюдается, если помеха представляет
непрерывный немодулированный сигнал: .
.
Напряжение на входе смесителя будет представлять сумму
 ,
причемUmм»Umc.
,
причемUmм»Umc.
Квадрат этого напряжения Δu2,
как в этом нетрудно убедиться после
элементарных выкладок, содержит
компоненты только с частотами 2ωc,
2ωми ,
и не дает на выходе смесителя тока
промежуточной частоты.
,
и не дает на выходе смесителя тока
промежуточной частоты.
Куб напряжения Δu3содержит компоненты с частотамиωм,
3ωм, ,
3ωс, ωс. Куб последнего равен
,
3ωс, ωс. Куб последнего равен

Это выражение совместно со вторым слагаемым выражения (3.8) дает на выходе смесителя составляющую промежуточной частоты (при n=1) с амплитудой,
 (3.19)
(3.19)
Принимая во внимание, что Umc«Umм в этом соотношении можно пренебречь малым вторым слагаемым:
 (3.20)
(3.20)
Отсюда следует, что при воздействии
помехи уровень преобразованного сигнала
на выходе смесителя изменяется –
увеличивается при
 или уменьшается при
или уменьшается при (перед вторым слагаемым вместо плюса
будет стоять минус). Эффект блокирования
количественно оценивают коэффициентом
блокирования – вторым слагаемым в
скобках:
(перед вторым слагаемым вместо плюса
будет стоять минус). Эффект блокирования
количественно оценивают коэффициентом
блокирования – вторым слагаемым в
скобках:
 (3.21)
(3.21)
Из соотношения (3.21) следует, что для
уменьшения эффекта блокирования
необходимо для смесителей выбирать
такие электронные приборы и режимы их
работы, когда отношение
 минимально, т.е. рабочий участок
динамической проходной характеристики
должен быть отрезком параболы второй
степени (
минимально, т.е. рабочий участок
динамической проходной характеристики
должен быть отрезком параболы второй
степени ( =0).
=0).
Целесообразно также применить улучшение избирательности преселектора, что приведет к уменьшению напряжения помехи на входе смесителя. Изменения условий распространения помехи меняют «глубину» блокирования полезного сигнала, т.е. происходит его амплитудная модуляция. Модуляция полезного сигнала возникает также, если помеха представляет собой амплитудно-модулированный сигнал. Это явление принято называть перекрестной модуляцией.
Перекрестную модуляцию принято рассматривать для случая, когда помеха на входе смесителя напряжения модулирована по косинусоидальному закону, т.е.
 (3.22)
(3.22)
Подставляя выражение (3.22) в соотношение (3.20), получим следующее соотношение для амплитуды выходного тока электронного прибора смесителя:
 (3.23)
(3.23)
В этом выражении второе слагаемое
характеризует эффект блокирования,
вызванный несущей сигнала помехи, третье
слагаемое определяет модуляцию полезного
сигнала программой помехи. Количественно
перекрестную модуляцию оценивают
коэффициентом перекрестной модуляции
амплитудой третьего слагаемого выражения
(3.23) при пренебрежении малым вторым
членом
 в круглых скобках:
в круглых скобках:
 (3.24)
(3.24)
Поскольку природа перекрестной модуляции та же, что и природа эффекта блокирования, способы ее ослабления такие же, как у последнего.
Эффект взаимной модуляции возникает в преобразователе частоты в том случае, когда на его вход из-за недостаточности избирательности преселектора попадает несколько сигналов помех.
Для упрощения анализа этого эффекта считаем, что передатчик полезных сигналов, на который настроен приемник, выключен.
Кроме того, полагаем, что на вход электронного прибора смесителя поступают напряжения только двух помех:
 ;
;
Взаимная модуляция возникает, если одна из комбинаций несущих частот помех равна:

где p,q=1, 2, 3... – целые числа.
Рассмотрим частный случай, когда р=1,q=1. Напряжение на входе электродного прибора:
 (3.25)
(3.25)
Полагаем, что
 ,
или
,
или
Подставим (3.25) в выражение (3.8) и после несложных, но громоздких выкладок найдем амплитуду компонентов выходного тока промежуточной частоты:
 (3.26)
(3.26)
Аналогично, считая
 ,
определим амплитуду компонента, этого
тока с частотой ωп:
,
определим амплитуду компонента, этого
тока с частотой ωп:
 (3.27)
(3.27)
Выходной ток смесителя оказывается модулированным программами обеих помех. В смесителе происходит взаимная модуляция сигналов помех. Способы ослабления взаимной модуляции такие же, как и способы ослабления интерференционных свистов. Кроме них целесообразно улучшение избирательных свойств преселектора.
39. Схема балансного диодного детектора
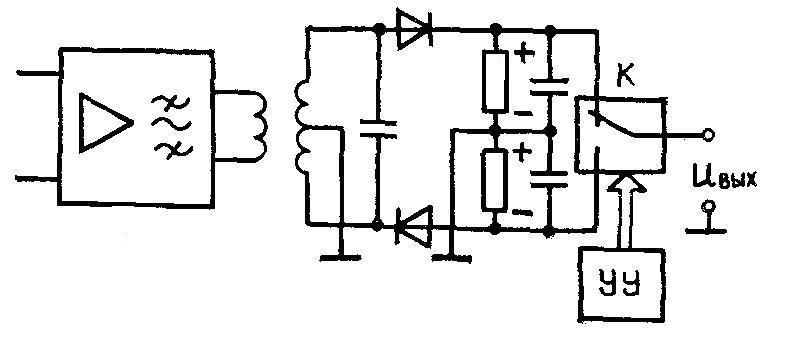
Рисунок 4.17. Схема детектора БМ-сигнала с преобразованием выходного сигнала.
Если диодный амплитудный детектор выполнен по обычной однополупериодной схеме и инерционен по отношению к биениям, то ни стенод, ни синхродин не ослабляют помеху. Чтобы и в этом случае синхронный детектор ослаблял, его надо построить по балансной схеме
Напряжение U0 от синхронного гетеродина поступает на диоды VD1 и VD2 с одинаковой фазой, а напряжение сигнала Uc со вторичной обмотки трансформатора в противофазе. При этом U0 значительно превышает амплитуду Uc. В результате на верхнем диоде амплитуда полного напряжения с частотой сигнала UсВ=U0+Uc, а на нижнем UсН=U0-Uc. Поскольку при действии помехи с амплитудой Uп инерционный детектор остается линейным, то продетектированное напряжение на нагрузке диода VD1 будет Uвых1≈UсВ+Uп, а на нагрузке диода VD2 соответственно Uвых2≈UсН+Uп. Результирующее напряжение на выходе детектора Uвых=Uвых1-Uвых2. Подставляя сюда значение напряжений, получаем
Uвых=U0+Uc+Uп–U0+Uc–Uп=2Uc. (4.14)
Следовательно, на выходе балансного синхронного детектора будет только сигнал, а помехи не будет.
40. Регулировки в РПМУ
В зависимости от назначения и степени универсальности радиоприемник имеет различные органы управления: для настройки на частоту нужного радиосигнала, для согласования уровня выходного сигнала и других параметров с требованиями потребителя принимаемой информации. Управление может быть ручным или автоматическим.
Автоматическое управление выполняется по командам, введенным в программное управляющее устройство; функции человека при этом исключаются либо сводятся к включению управляющего устройства, например к нажатию клавиши и т. п.
Условия работы приемника могут изменяться. Могут различаться уровни радиосигналов от разных источников. Возможна нестабильность уровня сигнала от данного передатчика из-за изменений, условий распространения радиоволн. Частота радиосигналов также может изменяться вследствие нестабильности передатчика или эффекта Доплера. Возможны изменения частоты сигнала в тракте промежуточной частоты из-за нестабильности частот гетеродинов в преобразователях частоты. Условия приема могут изменяться также при наличии нестационарных помех — аддитивных и мультипликативных. В подобных случаях приходится регулировать цепи и узлы приемника для получения оптимального режима приема.
Управление и регулирование могут быть непосредственными либо дистанционными. В случае дистанционного управления оператор или управляющее устройство находятся на расстоянии от приемника и связаны с ним средствами телеуправления и телесигнализации. Ручное управление и ручная регулировка допускают применение электромеханических устройств. Например, настройка приемника на нужную частоту до недавнего времени осуществлялась главным образом переключением катушек индуктивности с помощью контактного переключателя поддиапазонов и плавным поворотом ротора переменного конденсатора. После замены переменных конденсаторов варакторами для плавной перестройки стали использовать контактные потенциометры, с помощью которых изменялось настроечное напряжение. Применение электромеханических органов для дистанционного или автоматического управления требует соответствующих двигателей, что приводит к усложнению конструкции и снижению надежности. Поэтому введение дистанционного и автоматического управления связано, как правило, с переходом к чисто электронным устройствам.
Автоматические регулировки необходимы также для обеспечения приема при быстро изменяющихся условиях, когда оператор не может действовать с достаточной быстротой и точностью, пользуясь ручными регуляторами. Кроме того, автоматизация позволяет упростить функции оператора либо вовсе исключить необходимость обслуживания приемной аппаратуры.
Функции регулировок усложняются в комплексных ситуациях, когда требуется обеспечить прием сложных сигналов при меняющихся условиях распространения и в сложной помеховой обстановке. Адаптация приемника к таким ситуациям для наиболее точного воспроизведения передаваемой информации представляет трудную задачу; оператор решает ее путем последовательных проб, которые требуют затраты времени и связаны с потерей части информации. Электронные автоматические регуляторы, основанные на применении быстродействующих микропроцессоров, решают эту задачу.
Основная тенденция развития всех видов техники, в том числе радиосвязи и радиовещания, — создание телеуправляемых и полностью автоматизированных систем. В этом случае все регулировки, необходимые для поддержания соответствия оборудования техническим требованиям, должны выполняться автоматически.
К наиболее распространенным автоматическим регулировкам приемников относят автоматическую регулировку усиления (АРУ) и автоматическую подстройку частоты (АПЧ).
Автоматическая регулировка усиления обеспечивает поддержание на выходе усилителя промежуточной частоты уровня сигнала, достаточно высокого и стабильного для воспроизведения сообщений от радиостанций различной мощности, находящихся на разных расстояниях и в меняющихся условиях распространения радиоволн. Благодаря простоте АРУ применяется почти во всех радиоприемниках.
Автоматическая подстройка частоты должна непрерывно обеспечивать оптимальное расположение спектра принимаемого сигнала в полосе пропускания приемника при вызываемых различными причинами изменениях частоты передатчика и настройки цепей приемника. АПЧ применяется почти во всех видах профессиональной радиоприемной аппаратуры и во многих радиовещательных приемниках.
При сильных помехах прием сообщений может ухудшиться или стать невозможным. Может потребоваться регулировка цепей приемника не только по критериям соответствия частоты и усиления, частоте и уровню принимаемого сигнала, но по более сложным критериям максимальной достоверности принимаемой информации. Для этой цели, в частности, может применяться автоматическая регулировка селективности, осуществляемая изменением ширины полосы пропускания и формы амплитудно-частотной характеристики. При сильных сигналах или низком уровне помех полоса пропускания расширяется, обеспечивая лучшее качество воспроизведения сообщений. При слабых сигналах или при повышении уровня помех может оказаться, что сужение полосы пропускания, хотя и вызовет ухудшение качества приема полезных сигналов по сравнению с предыдущим случаем, приведет к еще более существенному ослаблению вредного действия помех. Назначение автоматической регулировки — установление оптимальной полосы пропускания, при которой приемник воспроизводит принимаемую информацию с наименьшими потерями. Подобные регулировки, равно как и некоторые другие, вследствие меньшей определенности условий получения эффективных результатов применяются реже, чем АРУ и АПЧ.
Поскольку по соображениям простоты конструкции, надежности и быстродействия в подавляющем большинстве случаев электронным системам регулировок отдается предпочтение перед электромеханическими, в дальнейшем будут рассматриваться преимущественно электронные системы.
41. РПМУ с ФМ
Фазовый детектор
Принцип действия ФД заключается в амплитудном детектировании двух напряжений: одного, поступающего от местного гетеродина, называемого опорным, и другого, поступающего с выхода УПЧ приемника той же частоты, но модулированного по фазе. Оба напряжения подаются на амплитудный детектор, который может быть на одном диоде или быть построенным по балансной схеме. В первом случае получается простейший фазовый детектор с сильно нелинейной детекторной характеристикой, что ограничивает область его практического применения. В схеме с балансным детектором параметры получаются значительно лучше, что предопределяет её широкое применение. В этом случае фазовый детектор очень похож на рассмотренный выше синхронный детектор.
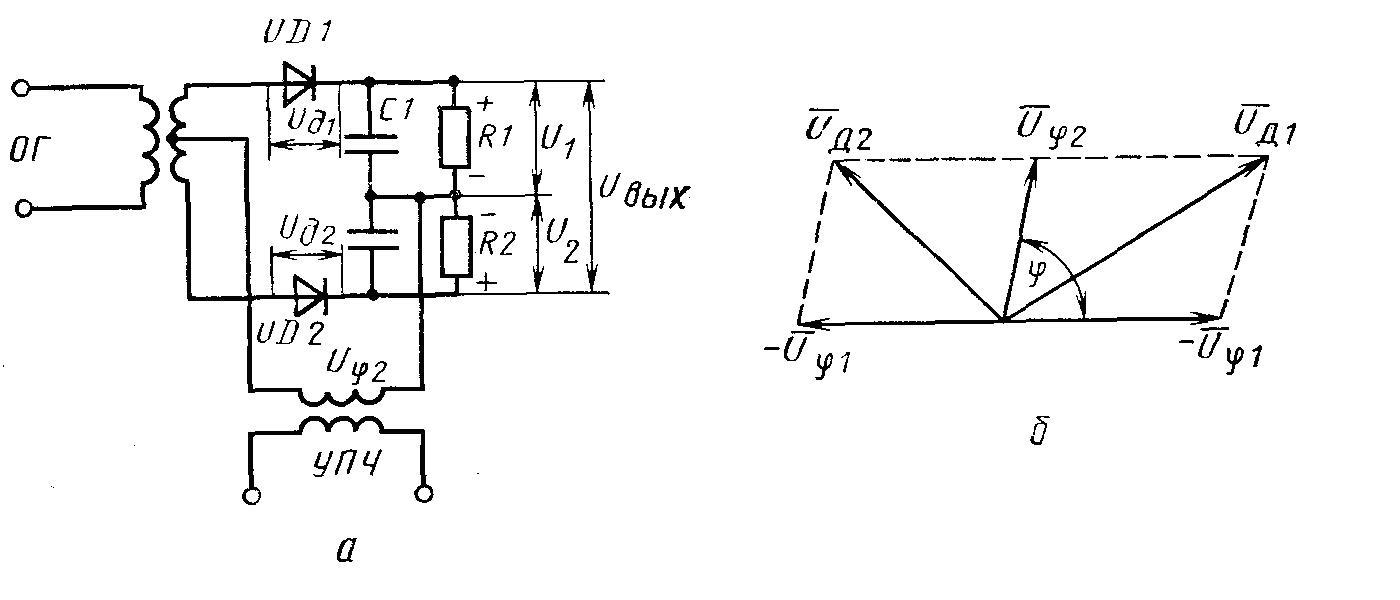
Рис. 4.21. Схема принципиальная электрическая фазового детектора и векторная диаграмма напряжений.
Ha pис. 4.21, а показана схема балансного ФД и векторная диаграмма (рис. 4.21, б) его преобразователя ФМ – AM, аналогичная рассмотренной ранее векторной диаграмме (см. рис. 4.20, в). Две другие векторные диаграммы преобразователя ФМ – AM будут аналогичными диаграммам, приведенным на рис. 4.20, а, б, поэтому здесь не приводятся.
При поступлении от
УПЧ на ФД напряжения, модулированного
по фазе, угол сдвига фаз φ
между
 и
и будет становиться то больше, то меньше
900,
что приведет к неравенству напряжений
будет становиться то больше, то меньше
900,
что приведет к неравенству напряжений
 и
и .
Следовательно, выходное напряжение
будет равно разности выходных напряжений
плеч (наR1
и R2):
.
Следовательно, выходное напряжение
будет равно разности выходных напряжений
плеч (наR1
и R2):
 .
Изменение выходного напряжения будет
пропорциональноизменению
фазы колебания
высокой частоты. Другими словами, в
данной схеме наличие фазовой модуляции
в принимаемом сигнале нарушает симметрию
приложенных к диодам напряжений, что
влечет за собой изменение протекающих
через них токов и, соответственно,
различие в напряжениях U1
и U2.
.
Изменение выходного напряжения будет
пропорциональноизменению
фазы колебания
высокой частоты. Другими словами, в
данной схеме наличие фазовой модуляции
в принимаемом сигнале нарушает симметрию
приложенных к диодам напряжений, что
влечет за собой изменение протекающих
через них токов и, соответственно,
различие в напряжениях U1
и U2.
Фазовые детекторы не применялись в радиовещании, но с переходом на цифровые технологии формирования и передачи радиовещательных сигналов интерес к ним возрастает, так как в цифровых системах радиовещания широко применяются методы фазовой модуляции.
42. Методика измерения динамического диапазона УПЧ. (определение границ линейного участка на динамической характеристике)
43. Синтезатор частоты (лаб. уст.)

44. Принцип синхронного детектирования сигналов с подавлением несущей частоты.
Ввиду разработки методов передачи АМ-сигналов с подавленной несущей и однополосных сигналов потребовалось решение задачи о детектировании таких сигналов. Использовать обычный АМ-детектор не представляется возможным из-за того, что огибающая радиосигналов с балансной и однополосной модуляцией не соответствует закону изменения модулирующего сигнала. Следовательно, нужны такие алгоритмы демодуляции, при которых выделить неискаженный модулирующий сигнал. Решение такой задачи рассмотрено в [6], в соответствии с которым возможны два основных метода детектирования сигналов с подавленной несущей.
Первый метод предполагает восстановление в принимаемом радиосигнале подавленной несущей, т.е. получение тем самым АМ-сигнала, а затем уже задача сводится к известной – к детектированию АМ-сигнала с помощью амплитудного детектора. Однако фаза восстановленной несущей в двухполосном сигнале должна точно совпадать с фазой подавленной несущей. Тогда верхние и нижние боковые частот будут расположены симметрично относительно несущей, как показано на векторной диаграмме рис. 4.9, а. В противном случае, когда фаза несущей восстановлена неверно (рис. 4.9, б), сумма принятого сигнала и восстановленной несущей оказывается промодулированной как по амплитуде, так и по фазе. Это видно из рис. 4.9, б, где штриховой линией показано перемещение конца вектора, который изменяет не только длину, но и направление. При этом огибающая, выделяемая амплитудным детектором, искажается, т. е. не повторяет форму первичного сигнала, а ее амплитуда уменьшается по сравнению со случаем, когда фаза несущей восстановлена точно.

Рисунок 4.9. Векторные диаграммы АМ-сигнала при восстановлении несущей: а) точное восстановление; б) восстановление со сдвигом фазы.
На рис. 4.10 показана зависимость коэффициента гармоник kг от неточности восстановления фазы несущей ψ при детектировании двухполосного сигнала амплитудным детектором. Там же показано отношение амплитуды полезного сигнала на выходе детектора к ее значению при ψ=0. Кривые построены для двух значений отношения амплитуды восстановленной несущей к амплитуде одной боковой частоты. Первый случай – Uн/Uб=2 (штриховая линия, m=1) и второй случай – отношение равно 20 (непрерывная линия). Анализ хода графиков позволяет сделать вывод о том, что увеличивая амплитуду восстановленной несущей, можно снизить нелинейные искажения до допустимых величин, если неточность фазы ψ не очень близка к 90°. Однако, чтобы амплитуда продетектированного сигнала не была существенно снижена, при любой амплитуде несущей ошибка ψ не должна превышать 20-30°. Необходимо отметить также, что при больших значениях ψ ухудшается отношение сигнал-шум на выходе детектора, так как уменьшается амплитуда полезного сигнала; а мощность шума от ψ не зависит и остается постоянной.
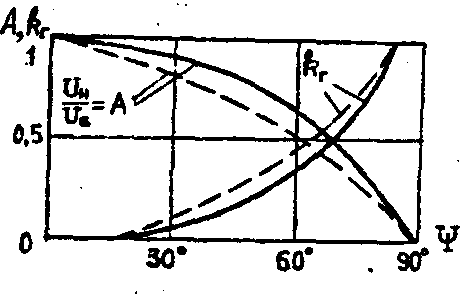
Рисунок 4.10. Зависимость коэффициента гармоник от точности восстановления фазы несущей.
Значительно проще и благополучнее детектирование двухполосного сигнала без несущей осуществляется вторым методом – с использованием синхронного детектора. В этом случае принимаемый сигнал δ(t) умножается на опорное напряжение гетеродина (восстановленную несущую) Uωcos(ω0t+ψ) где ψ – погрешность при восстановлении фазы несущей
 (4.8)
(4.8)
Первый член (4.8) представляет собой высокочастотную составляющую произведения (с частотой 2ω0), которая отфильтровывается, второй – является результатом детектирования и пропорционален первичному сигналу x(t). Таким образом, при синхронном детектировании двухполосного сигнала никаких искажений не возникает, каковы бы ни были амплитуда Uω и начальная фаза φ восстановленной несущей. Неточность фазы вызывает только уменьшение уровня продетектированного сигнала, пропорциональное cos(φ-ψ). Если потребовать, чтобы уровень продетектированного сигнала уменьшался не более, чем на 10%, необходимо восстановить фазу несущей с точностью ±15°, если же допустимо снижение на 30°, то тре6уется точность фазы ±45°.
Преимущество синхронного детектирования перед детектированием огибающей суммы сигнала и восстановленной несущей очевидно. При обычной АМ, когда в принимаемом сигнале уже содержится несущая, детектирование огибающей наиболее просто, и поэтому практически только оно и используется. При передаче без несущей последнюю все равно приходится восстанавливать, т.е. синтезировать в приемнике. После этого синхронное детектирование выполняется столь же просто, как и детектирование огибающей.
Аналогичным образом решается задача детектирования ОМ-сигнала. Метод восстановления несущей и формирования АМ-сигнала приводит к нелинейным искажениям [6] полезного сигнала. Применение синхронного детектора избавляет от нелинейных искажений, хотя сохраняются линейные искажения, заключающиеся в фазовом сдвиге всех составляющих продетектированного сигнала на величину, противоположную погрешности фазы восстановленной несущей. Действительно, используя ОМ-сигнал δОМ(t) после синхронного детектирования получаем:
 (4.9)
(4.9)
Полезным здесь является второй (низкочастотный) член, который с точностью до постоянного множителя представляет первичный сигнал x(t)=X(t)cos[Ф(t)+φ] с фазами, сдвинутыми на угол (φ-ψ).
Как уже говорилось, ОМ представляет собой, в сущности, перенос спектра сигнала вверх на частоту ω0, а синхронное детектирование – обратный перенос вниз. Как и при всяком преобразовании частоты, здесь сохраняется огибающая сигнала, мгновенная же частота сдвигается на частоту гетеродина ωг=ω0. Начальная фаза при этом также смещается на величину, равную начальной фазе гетеродина ψ. Известно, что форма огибающей первичного сигнала отличается от формы самого первичного сигнала и, кроме этого, может существенно изменяться при изменении начальной фазы. Поэтому, если требуется передать точную форму первичного сигнала, то восстановленная несущая при ОМ должна точно совпадать по фазе с подавленной несущей. В этом случае принимать БМ-сигнал проще, так как допустимо отклонение фазы восстановленной несущей в пределах ±15°.
Однако дело коренным образом меняется, если первичный сигнал x(t) является звуковым. Слуховой аппарат человека устроен так, что он не воспринимает непосредственно фазовых соотношений составляющих звука. Поэтому, какова бы ни была начальная фаза ψ опорного сигнала, звук воспринимается одинаково, лишь бы сохранился его амплитудный спектр. В этих условиях ОМ-сигнал принимается проще, чем сигнал БМ, так как допустимый является любое значение начальной фазы восстановленной несущей. Более того, при передаче речи с помощью ОМ не только фаза восстановленной несущей произвольна, но и сама несущая частота может быть восстановлена не абсолютно точно. Неточность восстановления частоты в единицы герц совершенно не ощущается на слух и расстройка становится заметна при величине в несколько десятков герц – появляется хрип и “металлический” звук. При расхождении частот в 50–100 Гц эти искажения становятся весьма неприятными, однако разборчивость речи сохраняется довольно высокой вплоть до расстроек 200 Гц и более. Именно поэтому ОМ нашла широкое применение в военных системах радиосвязи для передачи в сетях оперативно-командной связи, где главным требованием является сохранение разборчивости речи (смысла передаваемой информации), а не её тембровая окраска.
46. Регулировка усиления
К наиболее распространенным автоматическим регулировкам приемников относят автоматическую регулировку усиления (АРУ) и автоматическую подстройку частоты (АПЧ).
Автоматическая регулировка усиления обеспечивает поддержание на выходе усилителя промежуточной частоты уровня сигнала, достаточно высокого и стабильного для воспроизведения сообщений от радиостанций различной мощности, находящихся на разных расстояниях и в меняющихся условиях распространения радиоволн. Благодаря простоте АРУ применяется почти во всех радиоприемниках.
основные причины, вызывающие колебания напряженности электромагнитного поля в точке приема и, следовательно, изменения ЭДС, наводимой в антенне.
Существенное влияние на интенсивность сигнала на входе приемника оказывает расстояние до передатчика, а оно может меняться в весьма больших пределах, иногда в сотни раз. Еще сильнее влияет расстояние между передатчиком и приемником при приеме вещательных и телевизионных программ в области метровых и более коротких волн. Если говорить о приеме сигнала, отраженного от какого-либо объекта (например, от самолета в радиолокации), то оказывается, что эффект изменения расстояния влияет еще значительнее.
Мощность передатчика принимаемой радиостанции бывает весьма различной и может изменяться в широких пределах. Это также существенно влияет на уровень входного сигнала.
При связи с подвижными объектами (судно, автомобиль, самолет и др.), а также между ними изменяется не только расстояние, но и взаимная ориентировка антенн передатчика и приемника. Поскольку эти антенны часто обладают направленным действием, то создаются причины, вызывающие изменение ЭДС сигнала в приемной антенне.
И, наконец, при связи на достаточно большие расстояния (сотни километров и больше) может сказываться непостоянство условий распространения радиоволн. Например, на коротких волнах наблюдается широкоизвестное явление замирания, вызывающее кратковременные уменьшения напряженности поля в точке приема в сотни и более раз вплоть до его уменьшения ниже уровня помех.
Виды АРУ
- Инерционные
АРУ обратного действия
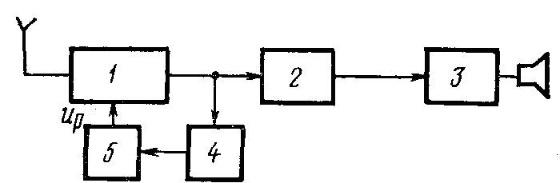
Рис.5.1. Структурная схема АРУ обратного действия.
Регулировка усиления радиочастотной части приемника осуществляется различными способами, которые будут изложены ниже.
Рассмотрим назначение отдельных элементов цепи АРУ (см. рис. 5.1). Детектор АРУ 4, фильтр 5 и каскады радиочастотного блока 1, участвующие в регулировке усиления, составляют петлю обратной связи.
АРУ прямого действия.
В состав схемы входят: тракт радиочастоты – 1, детектор основного канала – 2, тракт модулирующей частоты – 3, УРЧ канала АРУ – 4, детектор АРУ – 5, фильтр АРУ – 6.
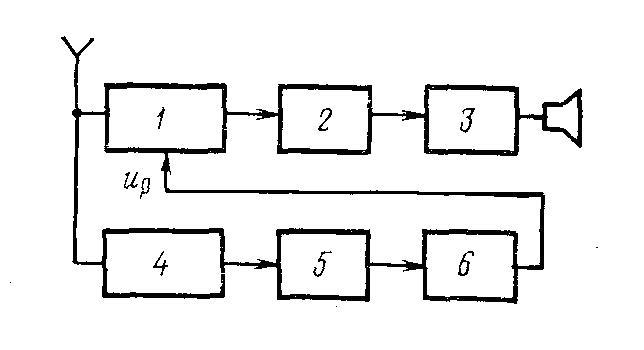
Рис. 5.3. Структурная схема АРУ прямого действия.
АРУ с задержкой. Это устройство регулирует усиление радиочастотного блока после того, как напряжение на его выходе превысит некоторый заданный порог (обычно десятые доли вольта). Делается это для того, чтобы при слабых сигналах не уменьшать усиления радиочастотного блока.
Во-вторых, иногда используются схемы АРУ с дополнительным усилением. Это повышает эффективность их действия, т. е. при заданном диапазоне изменений входного сигнала напряжение на выходе меняется в меньших пределах.
Усиление в цепи АРУ можно осуществлять до детектора (по промежуточной частоте) по схеме рис. 5.4, а или после него (по постоянному напряжению) по схеме рис. 5.4, б.
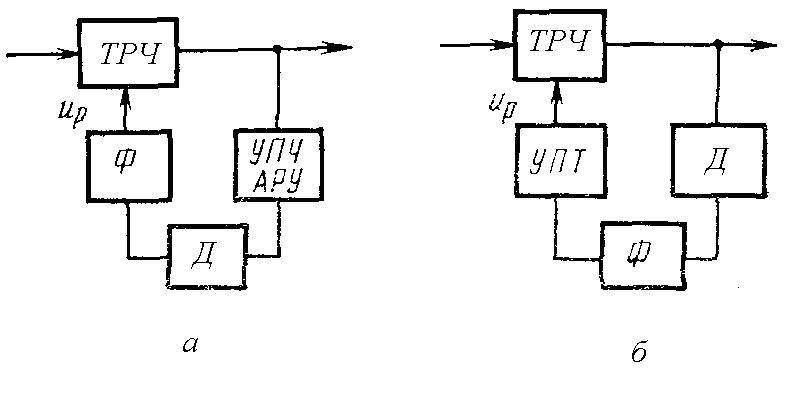
Рис. 5.4. Структурные схемы АРУ с усилением сигнала: а - до детектора, б - после детектора и фильтра АРУ.
И, наконец, в-третьих, схемы АРУ отличаются между собой методами регулировки усиления, т. е. схемами электронных регуляторов (ЭР).
Очень распространены схемы регулировки за счет изменения режима и, следовательно, параметров (крутизны характеристики) усилительных элементов: электронных ламп, биполярных или полевых транзисторов.
- быстродействующие АРУ (или БАРУ), в которых отсутствует фильтр. Известны также программные АРУ, в которых усиление регулируется по заранее заданной программе.
системы, АРУ должны удовлетворять ряду требований, выполнение которых необходимо для нормальной работы приемника. К числу важнейших из них относятся следующие.
1. Обеспечение достаточно малого времени установления переходного процесса в цепи АРУ при быстром изменении амплитуды сигнала на входе приемника.
2. Получение минимальных нелинейных искажений и комбинационных помех (это требование не всегда легко выполнимо, так как в качестве ЭР обязательно используются нелинейные элементы).
3. Обратная связь в цепи АРУ не должна нарушать устойчивой работы приемника.
4. Изменение полосы пропускания и частоты настройки контуров радиочастотного блока при работе АРУ не должно превышать допустимых пределов.
Работа любой системы АРУ определяется следующими основными характеристиками:
1) амплитудной характеристикой радиочастотного блока при замкнутой цепи АРУ;
2) регулировочной характеристикой электронного регулятора или всего радиочастотного блока;
3) коэффициентом авторегулирования Кару;
4) переходным процессом и временем установления напряжения uр при скачкообразном изменении уровня входного сигнала;
5) усилением петли АРУ в разомкнутом состоянии (петлевое усиление Кп= Кару = uр/ uвх, где uвх – амплитуда сигнала в точке введения регулирующего напряжения, наиболее близкой к входу приемника).
Амплитудной характеристикой (АХ) как известно, называется график зависимости амплитуды напряжения на выходе радиочастотного блока от амплитуды напряжения на входе
Регулировочной характеристикой (РХ) электронного регулятора называется зависимость его коэффициента передачи от регулирующего напряжения
Коэффициент авторегулирования показывает, во сколько раз уменьшается относительная величина напряжения на выходе радиочастотного блока при заданном изменении напряжения на его выходе.
47. Методы борьбы с зеркальным каналом ( ЗК ) приема
Наличие зеркального канала в приемнике может привести:
1) к одновременному приему двух сигналов, частоты которых отличаются друг от друга на 2fn (полезный сигнал проходит по основному, а помеха — по зеркальному каналу);
2) к ложной настройке приемника (рис. 3.12). При правильной настройке приемника (рис: 3.12,а) сигнал проходит по основному каналу, на который настроен преселектор. Пунктиром на рис. 3.12 показана амплитудно-частотная характеристика преселектора. В случае ложной настройки (рис. 3.12,б) сигнал проходит по зеркальному каналу. В результате программа полезного сигнала будет приниматься при двух положениях ручки настройки, отстоящих по шкале приемника на 2fn;
3) к ухудшению отношения сигнал/шум за счет прохождения по зеркальному каналу шумов и помех, поступающих от антенно-фидерного устройства;
4) к прохождению шумов гетеродина.
Влияние зеркального канала ослабляют:
а) включением между антенно-фидерным устройством и преобразователем частоты преселектора с достаточно высокой избирательностью по зеркальному каналу;
б) улучшением избирательности преселектора за счет:
— повышения добротности его контуров;
— увеличения числа каскадов УВЧ;
— повышения промежуточной частоты;
в) путем использования преобразователя частоты без зеркального канала, функциональная схема которого показана на рис. 3.14 (СМ — смеситель, φ — фазовращатель, Σ — суммирующий каскад).
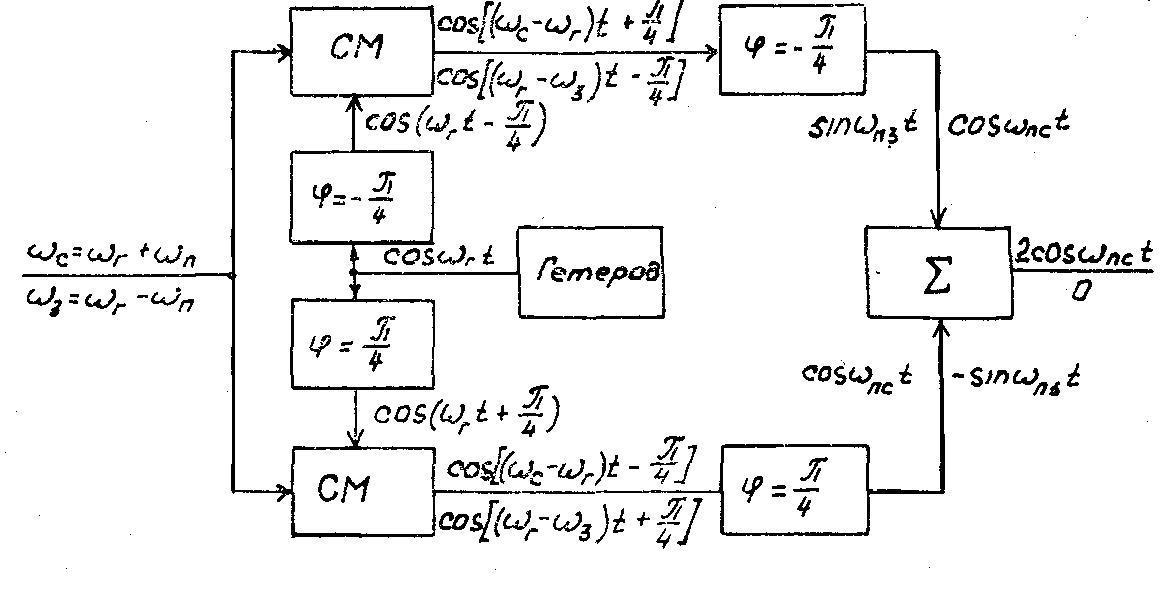
Рис. 3.14. Функциональная схема преобразователя частоты с компенсацией зеркального канала.
48. Методика измерения избирательности РПМУ по соседнему каналу
49. Регулировка полосы пропускания