

2. Функции электропривода. Энергетический канал. Координаты привода. Структура и назначение основных узлов
Рассмотрим
подробнее силовой (энергетический)
канал электропривода (рис. 1.2). Будем
полагать, что мощность Р
передается от сети (Р1)
к рабочему органу (Р2),
что этот процесс управляем и что передача
и преобразование мощности сопровождается
некоторыми ее потерями
![]() Р
в каждом элементе силового канала.
Р
в каждом элементе силового канала.
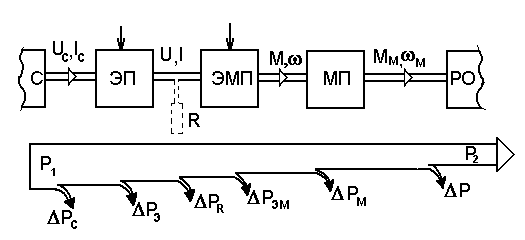 Рис.
1.2. Энергетический канал
Рис.
1.2. Энергетический канал
Функция электрического преобразователя ЭП (если он используется) состоит в преобразовании электрической энергии, поставляемой источником (сетью) и характеризуемой напряжением Uс и током Iс сети, в электрическую же энергию, требуемую двигателем и характеризуемую величинами U, I. Преобразователи бывают неуправляемыми (трансформатор, выпрямитель, параметрический источник тока) и чаще - управляемыми (мотор-генератор, управляемый выпрямитель, преобразователь частоты), они могут иметь одностороннюю (выпрямитель) или двухстороннюю (мотор-генератор, управляемый выпрямитель с двумя комплектами вентилей) проводимость. В случае односторонней проводимости преобразователя и обратном (от нагрузки) потоке энергии используется дополнительный резистор R для “слива” тормозной энергии.
Электромеханический
преобразователь ЭМП
(двигатель), всегда присутствующий в
электроприводе, преобразует электрическую
энергию (U,
I) в механическую
(М,
![]() )
и обратно.
)
и обратно.
Механический
преобразователь
(передача) - редуктор, пара винт-гайка,
система блоков, кривошипно-шатунный
механизм и т.п. осуществляет согласование
момента М
и скорости
![]() двигателя с моментомМм
(усилием Fм)
и скоростью м
рабочего органа технологической машины.
двигателя с моментомМм
(усилием Fм)
и скоростью м
рабочего органа технологической машины.
Величины, характеризующие преобразуемую энергию, - напряжения, токи, моменты (силы), скорости называют координатами электропривода.
Основная функция электропривода состоит в управлении координатами, т.е. в их принудительном направленном изменении в соответствии с требованиями обслуживаемого технологического процесса.
Управление координатами должно осуществляться в пределах, разрешенных конструкцией элементов электропривода, чем обеспечивается надежность работы системы. Эти допустимые пределы обычно связаны с номинальными значениями координат, назначенными производителями оборудования и обеспечивающими его оптимальное использование.
В правильно
организованной системе при управлении
координатами (потоком энергии) должны
минимизироваться потери
![]() Р
во всех элементах и к рабочему органу
должна подводиться требуемая в данный
момент мощность.
Р
во всех элементах и к рабочему органу
должна подводиться требуемая в данный
момент мощность.
Эти вопросы - свойства и характеристики различных электроприводов, как правильно управлять их координатами в установившихся - статических - и переходных - динамических - режимах, как оценивать энергетические свойства и, наконец, как правильно проектировать силовую часть электропривода - будут основным предметом курса.
3. Классификация электроприводов. Области применения.
Сегодня в приборных системах используются электроприводы, мощность которых составляет единицы микроватт; мощность электропривода компрессора на перекачивающей газ станции - десятки мегаватт, т.е. диапазон современных электроприводов по мощности превышает 1012. Такого же порядка и диапазон по частоте вращения: в установке, где вытягиваются кристаллы полупроводников, вал двигателя должен делать 1 оборот в несколько десятков часов при очень жестких требованиях к равномерности движения; частота вращения шлифовального круга в современном хорошем станке может достигать 150000 об/мин.
Но особенно широк - безгранично широк - диапазон применений современного электропривода: от искусственного сердца до шагающего экскаватора, от вентилятора до антенны радиотелескопа, от стиральной машины до гибкой производственной системы. Именно эта особенность - теснейшее взаимодействие с технологической сферой - оказывала и оказывает на электропривод мощное стимулирующее влияние. Непрерывно растущие требования со стороны технологических установок определяют развитие электропривода, совершенствование его элементарной базы, его методологии. В свою очередь, развивающийся электропривод положительно влияет на технологическую сферу, обеспечивает новые, недоступные ранее возможности.