

8.2. Драйверная схема.
Будем использовать двунаправленный драйвер двигателей постоянного тока MoviPower Lite компании Movicom. Основными достоинствами драйвера являются:
Рабочее напряжение: 5.5 ÷ 36 В
Рабочий ток: до 8 A
Пиковый ток: до 30 A
Частота ШИМ (макс.): 20 кГц
Реверсивное управление
Защита от перегрузки по току и от перегрева
Спящий режим
Рисунок 32. Драйвер двигателей постоянного тока MoviPower.
8.3. Энкодер.
Будем использовать инкрементный энкодер ECW1J-B28-BC0024L компании Bourns.

Рисунок 33. Инкрементный энкодер ECW1J-B28-BC0024L компании Bourns.
8.4. Цифровая камера.
Будем использовать цифровую камеру Eye 312 компании Generous. Основными достоинствами решения являются:
скорость съёмки до 10 кадров в секунду;
разрешение 640 на 480 пикселей;
относительно небольшие размеры;
интерфейс USB.

Рисунок 34. Цифровая камера Eye 312 компании Generous.
8.5. Схема, организующая обмен данными по интерфейсу USB.
Будем использовать схему K8055 USB Experiment Interface Board компании Velleman.
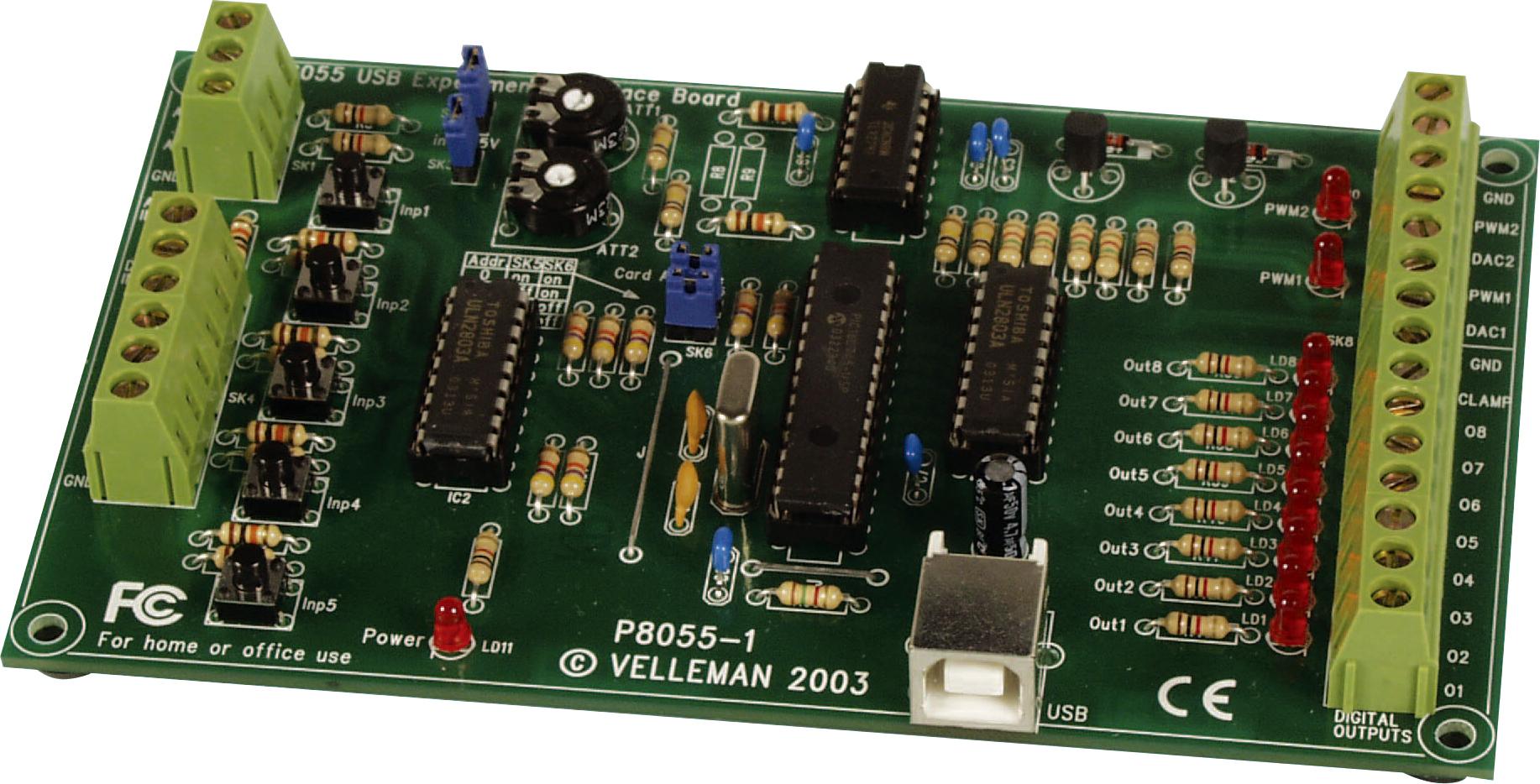
Рисунок 35. Схема K8055 USB Experiment Interface Board компании Velleman.
8.6. Мобильный ПК.
Будем использовать ноутбук Samsung R60 Rlus. Основные параметры решения перечислены в таблице 2.

Рисунок 36. Ноутбук Samsung R60 Rlus.
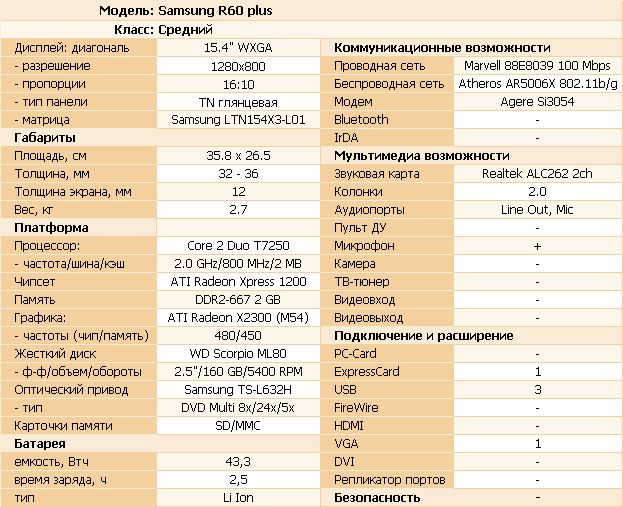
Таблица 2. Основные параметры ноутбука Samsung R60 Rlus.
9. Проектирование схем управления.
С учетом выбранных компонентов спроектируем управляющую плату. Принципиальная схема управляющей платы представлена на рисунке 23.
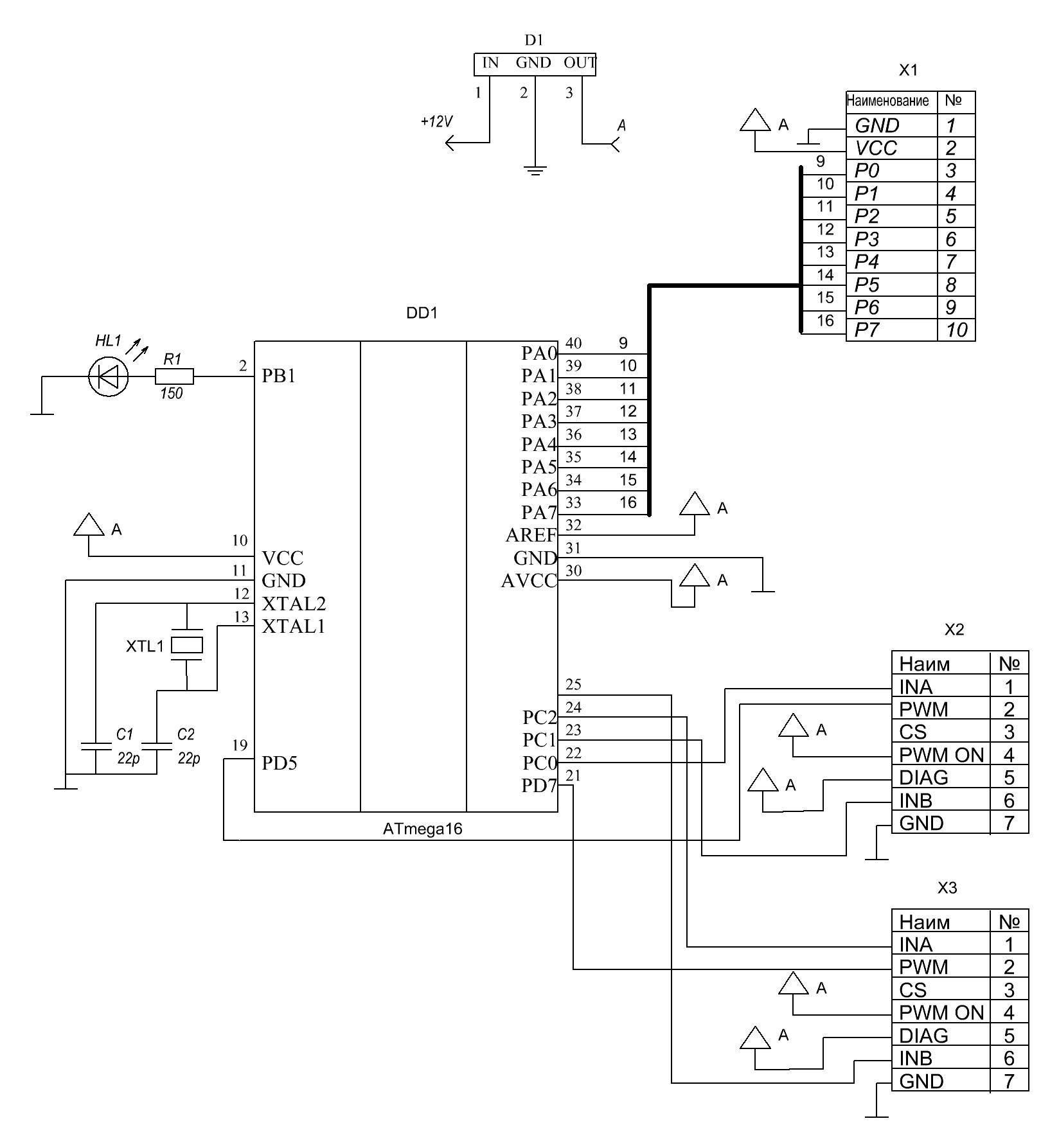
Рисунок 37. Управляющая плата. Принципиальная схема.
Обозначения:
D1 – стабилизатор на 5В;
DD1 – микроконтроллер ATmega16;
X1 – разъём под шлейф на схему K8055 USB Experiment Interface Board.
X2, X3 – разъёмы под шлейф на драйверные схемы MoviPower Lite;
XTL1 – резонатор 8МГц;
R1 – резистор 200 Ом;
С1, С2 – конденсаторы, 22 пФ;
HL1 – светодиод.
10. Алгоритмы управления.
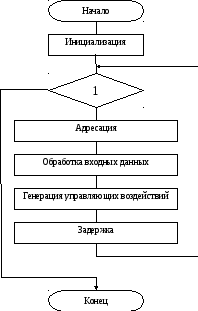
Рисунок 38. Алгоритм работы контроллера, управляющего приводами колёс.
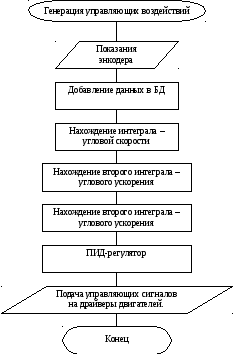
Рисунок 39. Реализация генерации управляющих воздействий контроллера управляющего приводами колёс.
Библиографический список
Подураев Ю.В. Мехатроника: основы, методы, применение: учеб. пособие для студентов вузов. // М.: Машиностроение, 2006 - 256 с.
Бесекерский В.А., Попов Е.П. Теория систем автоматического управления. // СПб.: Профессия, 2003 - 752 с.
Воронов А.А., Титов В.Н., Новогранов Б.Н. Основы теории автоматического регулирования и управления. Учеб. Пособие для вузов. // М.: Высшая школа, 1977 - 519 с.
http://www.prorobot.ru/myrobot/robot-diana.php
Брюханов В.Н., Косов М.Г., Протопопов С.П., Соломенцев Ю.М., Султан-Заде Н.М., Схиртладзе А.Г. Теория автоматического управления. // М.: Высшая школа. 2000 - 268 с.
Мошкин В.И., Петров А.А., Титов В.С., Якушенков Ю.Г. Техническое зрение роботов // М.: Машиностроение, 1990 - 272с.
Фрайден Дж. Современные датчики. Справочник. // М.: Техносфера, 2005 - 592с.
Егоров О.Д., Подураев Ю.В. Конструирование мехатронных модулей // М.: ИЦ МГТУ «СТАНКИН», 2004 – 360с.
Половко С.А. Интеллектуальные системы технического зрения для безопасности и навигации [Текст] / С.А. Половко, Е.Ю. Смирнова, Д.Н. Степанов // Мехатроника, автоматизация, управление. №3, 2009 г. / Москва, 2009. – с. 33-39.
Крайлюк А.Д. Основы концепции развития робототехники военного назначения до 2030 г. [Текст] / А.Д. Крайлюк, В.И. Комченков, А.А. Ивлев // Мехатроника, автоматизация, управление. №3, 2009 г. / Москва, 2009. – с. 10-15.
Савин С.И. Мобильная платформа передвижного диагностического комплекса [Текст] / С.И. Савин // Информационно-измерительные, диагностические и управляющие системы. Диагностика – 2009: сб. материалов Междунар. научн.-техн. конф. Ч. 1. / Курск. гос. техн. ун-т. – Курск, 2009. – с. 135-138.
Пат. на полезную модель №89837 Российская Федерация U1 МПК B62D57/00. Мобильный робот с камерой и направленными источниками лазера [Текст] / Яцун С.Ф., Савин С.И.; заявитель и патентообладатель ГОУ ВПО «Курский государственный технический университет» - №2009131365/22; заявл. 17.08.09; опубл. 20.12.09.
Савин С.И. Проектирование конструкции мобильного робота, оснащенного системой технического зрения [Текст] / С.И. Савин, Аль-Еззи Абдулракеб Саид Яхья // Современные инструментальные системы, информационные технологии и инновации. Материалы VII Международной научно-технической конференции. / Курск. гос. техн. ун-т. – Курск, 2010. – с. 165-169.
Савин С.И. Применение технического зрения для повышения эффективности работы системы автоматического управления мобильного робота [Текст] / С.И. Савин // Материалы докладов IV Международной молодёжной научной конференции «Тинчуринские чтения» / Под общ. ред. д-ра физ.-мат. наук, проф. Ю.Я. Петрушенко. В 4 т.; Т. 3. / Казан. гос. энерг. ун-т. – Казань, 2009. – с. 171-172.
Сойфер В.А. Методы компьютерной обработки изображений [Текст] / В.А. Сойфер, ФИЗМАТЛИТ. – Москва, 2003.
Савин С.И. Программное управление мобильным роботом, оснащенным системой технического зрения [Текст] / С.И. Савин // Приоритетные направления современной науки глазами молодых учёных. / Ряз. гос. ун-т им. С.А. Есенина. – Рязань, 2009. – с. 210-212.
Савин С.И. Организация программного управления мобильным роботом [Текст] / С.И. Савин // Современные инструментальные системы, информационные технологии и инновации. Материалы VII Международной научно-технической конференции. / Курск. гос. техн. ун-т. – Курск, 2010. – с. 169-172.