

«Регистрация точек в массиве»
Рассмотрим пример. Мы выбрали в качестве
исследуемого отображения логистическую
функцию,
![]() ,
,![]() ,
шаг поλвыбран 0.2. Таким образом
КоличествоТочекПоА = 5. КоличествоТочекПоХ
примем также равное 5. Исходный массив
результата имеет вид:
,
шаг поλвыбран 0.2. Таким образом
КоличествоТочекПоА = 5. КоличествоТочекПоХ
примем также равное 5. Исходный массив
результата имеет вид:
|
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
Начнем выполнять итерации при λ = 3. На
каком-то регистрируемом шаге мы получили
значение x= 0.35. Необходимо занести
это значение в массив. Представим, что
весь интервал
![]() разбит на 5 интервалов
разбит на 5 интервалов![]() – это и есть столбец нашего массива
результатов. Значениеx= 0.35 попадает
во второй интервал (int(0.35/0.2) + 1 = 2),
следовательно, во второй строке должна
появиться отметка об этом. Проще всего
записывать 1. Проведя аналогичные
рассуждения относительно λ, получаем,
что 1 должна записаться в 1 столбец, т.е.
– это и есть столбец нашего массива
результатов. Значениеx= 0.35 попадает
во второй интервал (int(0.35/0.2) + 1 = 2),
следовательно, во второй строке должна
появиться отметка об этом. Проще всего
записывать 1. Проведя аналогичные
рассуждения относительно λ, получаем,
что 1 должна записаться в 1 столбец, т.е.
|
0 |
0 |
0 |
0 |
0 |
|
1 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
0 |
Аналогично выполняется «регистрация» результатов последующих итераций.
5. Необходимо помнить, что MatLABоптимизирован для выполнения векторных операций. Т.е. кодx = [0:0.1:1]; y = sin(x);будет выполняться значительно быстрее, чем соответствующий перебор массиваxи вычисления для него массиваy.
6. Инициализацию массива удобно выполнять при помощи команды zeros(m,n).
Литература к лабораторной работе №5
Медведева Н.Б. Динамика логистической функции. Соросовский образовательный журнал, том 6, №8, 2000.
Климонтович Ю.Л. Введение в физику открытых систем. Соросовский образовательный журнал, №8, 1996.
Кузнецов А.П. Наглядные образы хаоса. Соросовский образовательный журнал, том 6, №11, 2000.
Кузнецов С.П. Динамический хаос. – М: Физматлит, 2001.
Лабораторная работа № 6. Карты динамических режимов и решетки связанных отображений Цель работы
Изучить методы построения и свойства карт динамических режимов, используемых для исследования хаотических свойств нелинейных систем. Выявить взаимосвязи между различными методами исследования динамического хаоса.
Основные сведения о картах динамических режимов
В предыдущих лабораторных работах были рассмотрены основные методы и разработаны базовые алгоритмы построения бифуркационных и паутинных диаграмм для исследования хаотических свойств нелинейных динамических систем. Как уже отмечалось, паутинная диаграмма позволяет проследить развитие системы, представленной в виде дискретного отображения, при фиксированном значении параметров. Бифуркационная диаграмма предназначена для изучения поведения системы на заданном диапазоне одного из параметров. Такой подход позволяет выявить и исследовать бифуркации, происходящие при изменении одного из параметров системы. Дальнейшим развитием и обобщением бифуркационной диаграммы служит карта динамических режимов.
Карты динамических режимов используются,
если система имеет 2 параметра. По оси
xв этом случае откладываем один из
параметров системы, по осиy– другой.
«Режим» системы изображается цветом.
На Рис. изображена бифуркационная
диаграмма логистической функции![]() и соответствующая диаграмме карта
динамических режимов, рассчитанная для
одного параметра. Зеленым цветом
обозначена область параметров, отвечающая
существованию неподвижной точки, желтым
– цикла периода 2, синим – цикла периода
4, красным – периода 8, серая область
соответствует хаосу.
и соответствующая диаграмме карта
динамических режимов, рассчитанная для
одного параметра. Зеленым цветом
обозначена область параметров, отвечающая
существованию неподвижной точки, желтым
– цикла периода 2, синим – цикла периода
4, красным – периода 8, серая область
соответствует хаосу.
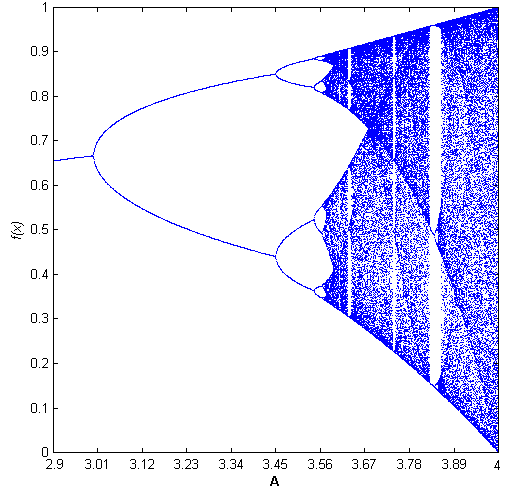
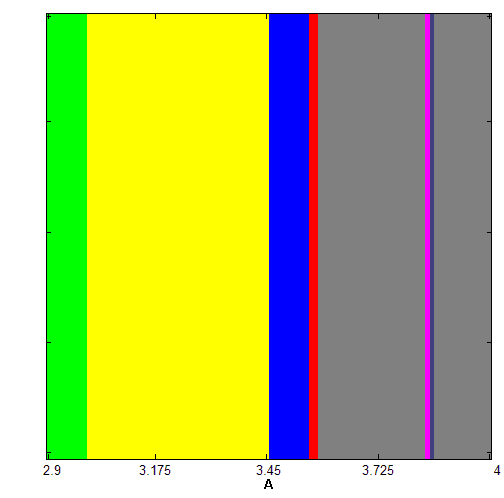
Рис. 6.1. Бифуркационная диаграмма и соответствующая ей карта динамических режимов для отображения с одним параметром
Конечно, при исследовании отображений
с одним параметром карты динамических
режимов обычно не используются. Область
их применения – отображения с двумя
параметрами. На Рис. представлена карта
режимов кубического отображения
![]() .
.
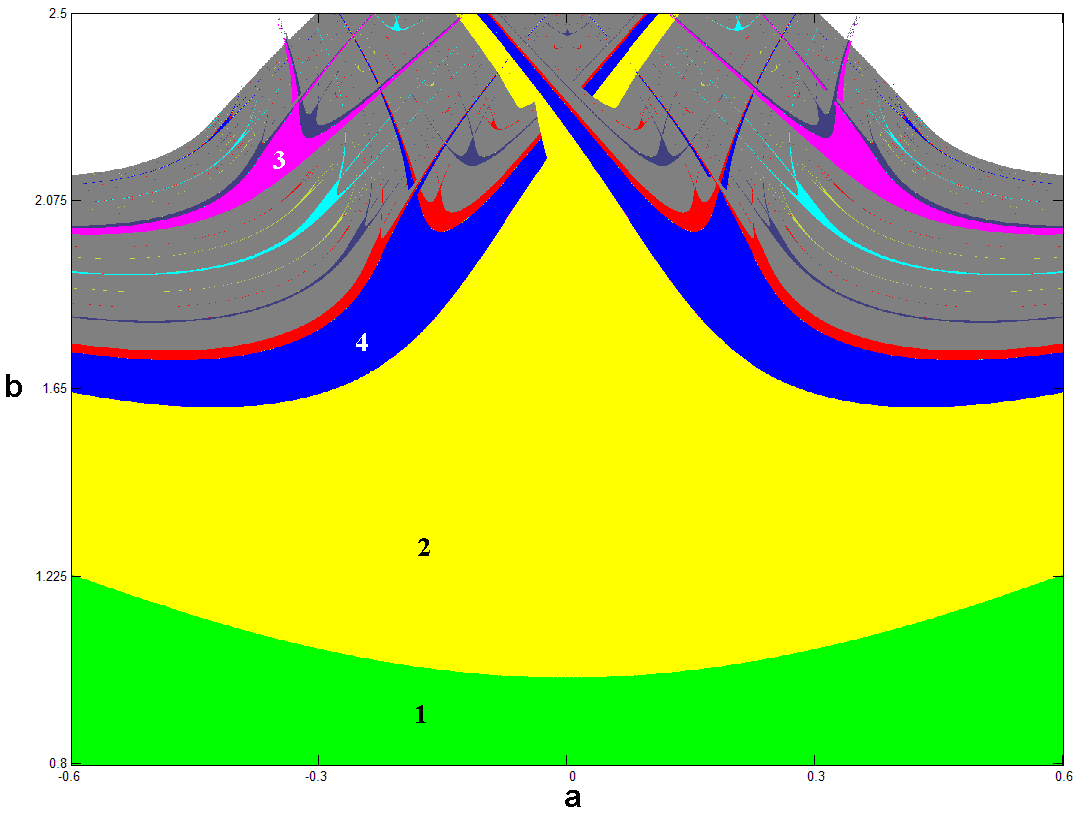
Рис. 6.2. Карта динамических режимов кубического отображения
Кроме исследований дискретных отображений с двумя параметрами карты динамических режимов используются для изучения решеток связанных отображений.