

4voina_ACY / 4-1-3А
.doc1.3. Автоматическое сопровождение целей
В результате первичной обработки радиолокационной информации на вход алгоритма автосопровождения поступают два потока отметок целей:
"истинных целей", группирующихся вблизи действительного положения целей;
"ложных целей'', одна часть из которых, привязана к областям помех и отражений от местных предметов, а другая - равномерно распределена по всей зоне обзора станции.
Если принято решение о том, что некоторое множество отметок, полученных каждая в своем обзоре РЛС, относится к одной и той же траектории, то следующей задачей является оценка параметров этой траектории, которая состоит в расчете рассмотренных в п. 2.2 параметров Х0, У0, Н0, Vx, Vy, VH, ax, ay и aH. При наличии двух отметок о цели в качества начальных координат Х0, У0 и Н0 принимаются координаты последней отметки, составляющие скорости Vx, Vy и VH рассчитываются так же, как и при автозахвате траектории.
При наличии большего числа отметок имеется возможность перехода к более сложной модели движения цели и сглаживанию параметров траектории. Сглаживание производится для того, чтобы уменьшить влияние ошибок измерения координат цели на точность сопровождения. Наиболее часто в АСУ встречаются линейная модель движения цели и последовательное сглаживание параметров траектории.
Сущность метода последовательного сглаживания состоит в том, что сглаженные значения параметров траектории в очередном k-м о6зоре определяются по сглаженным значениям, полученным в (k-1)-м обзоре, и результатам последнего k-го наблюдения. Независимо от числа проведенных наблюдений в очередном цикле вычислений используются лишь предыдущая оценка и результат нового наблюдения. При этом требования к емкости запоминающих устройств и быстродействию аппаратуры значительно уменьшаются.
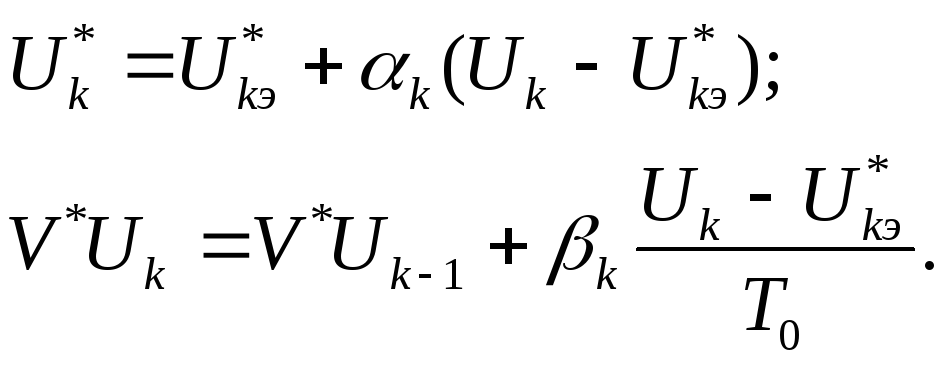
Окончательные выражения для сглаживания координаты и скорости в k-м обзоре РЛС имеют следующий вид:
 (2.8)
(2.8)
Из этих формул видно, что сглаженное значение координаты равно сумме экстраполированной на момент k-то наблюдения сглаженной координаты U*kэ и взятого с коэффициентом k отклонения экстраполированной координаты от результата измерения.
Сглаженное значение скорости в k-м обзоре V*Uk есть сумма сглаженной скорости V*Uk-1 в (k-1)-м обзоре и взятого с коэффициентом k приращения скорости, которое пропорционально отклонению.
U=Uk-Ukэ.
Н
Рис. 5. Сглаживание
параметров траектории цели.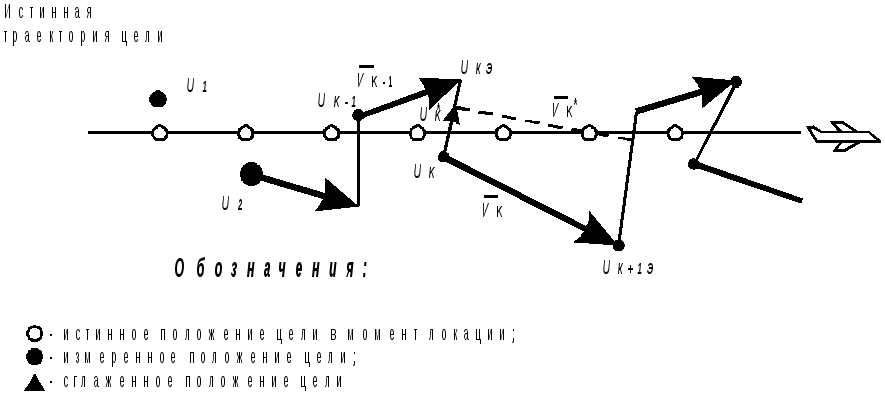
Пунктирная линия на рис. 5 означает сглаженную траекторию цели, рассчитанную в ЭВМ АСУ в k-м обзоре. Ввиду того, что коэффициенты сглаженных координат k и k лежат в пределах 0...1, сглаженная начальная координата находится в интервале U*КЭ … UК, а сглаженная скорость - V*Uk-1 … V*Uk .
Д
Рис. 6. Зависимость
коэффициентов сглаживания от К.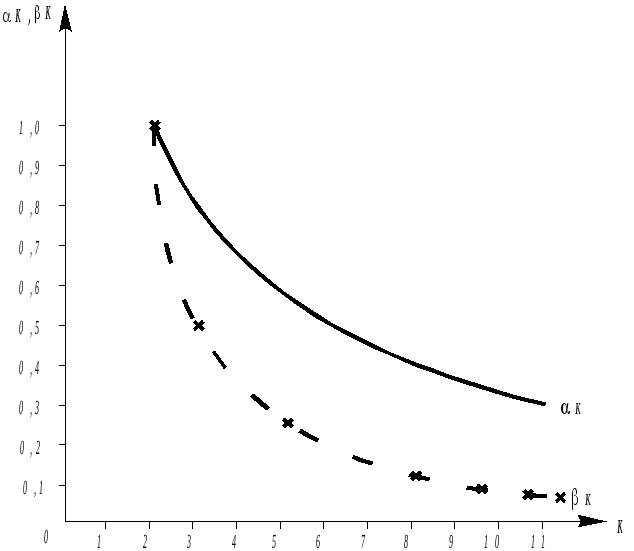
![]()
![]() (2.9)
(2.9)
На рис. 6 показана зависимость k и k от номера обзора k. Из графиков рисунка видно, что коэффициенты асимптотически приближаются к нулю. В пределе при k этим достигается полное устранение ошибок сопровождения цели. На практике же всегда имеют место отклонения траектории цели от прямолинейной.
Поэтому значения коэффициентов k и k уменьшаются лишь до определенных пределов.
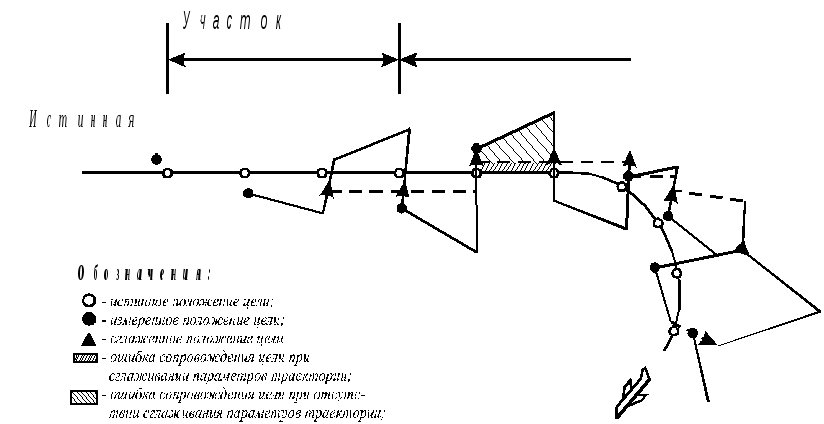
Качественно влияние сглаживания на точность сопровождения цели может быть оценено с помощью рис. 7. На участке прямолинейного движения ошибка сглаженных координат цели меньше несглаженных: отрезки пунктирных линий расположены ближе к истинной траектории цели, чем отрезки сплошных линий. На участке маневра за счет несоответствия истинного характера движения цели гипотетическому возникают динамические ошибки сопровождения. Теперь уже отрезки сплошных линий более точно определяют фактическое положение цели по сравнению с отрезками пунктирных линий.
В
Рис. 7. Влияние сглаживания параметров
траектории на точность сопровождения
цели
Знание параметров траектории позволяет вычислить текущее положение цели на любой момент времени t:
![]()
![]()
![]()
Обычно вычисление текущих (экстраполированных на данный момент времени) координат цели приурочивается к моментам выдачи информации на индикаторы, в каналы связи, зоны памяти других алгоритмов и др. Вычисление прогнозируемых значений координат целей производится по формулам:
![]()
![]() (2.10)
(2.10)
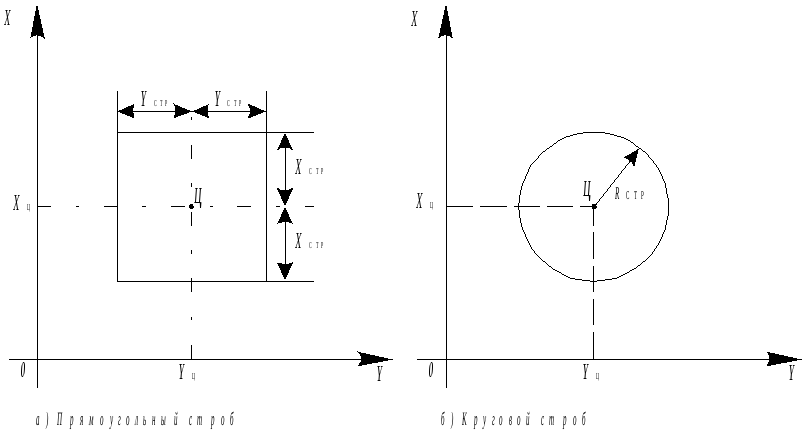
Рис. 8. Параметры
стробов![]()
где ty - время упреждения, отсчитываемое от текущего момента t.
Обычно ty при оценке воздушной обстановки задается командирами, а при решении других задач обработки данных считывается из постоянной памяти ЭВМ АСУ.
Завершающим этапом сопровождения целей является решение задачи соотнесения вновь появляющихся отметок с имеющимися траекториями. Эта задача решается методом математического стробирования областей воздушного пространства. Сущность его состоит в машинной проверке выполнения равенств, с помощью которых устанавливается принадлежность отметки исследуемой области. При этом чаще всего используются прямоугольные или круговые стробы. Их параметры показаны на рис. 8.
Пусть ХЭ, УЭ - экстраполированные координаты цели на некоторый момент времени t. Для выяснения того, какая из отметок, поступивших в очередном обзоре, относится к данной траектории, необходимо проверить условия:
при использовании прямоугольных стробов -
|X1-XЭ| Xстр; |Y1-YЭ| Yстр; (2.11)
при использовании кругового строба -
(Xi – XЭ)2 + (Yi – YЭ)2 Rстр, (2.12)
где Хстр, Yстр - размеры прямоугольного строба;
Rстр - размер кругового строба.
В результате перебора всевозможных пар «траектория-отметка» в каждом обзоре устанавливается, какие отметки продолжают имеющиеся, а какие инициируют новые трассы.
Из описания алгоритмов сопровождения траекторий целей видно, что обработка информации о воздушной обстановке является весьма трудоемким процессом, требующим больших затрат оперативной памяти и быстродействия ЭВМ АСУ.
При этом возможны случаи:
1) в стробе сопровождения отметок нет;
2) в стробе сопровождения одна отметка;
3) в стробе сопровождения одна две и более отметки.
В первом случае производится подсчет числа пропусков цели. На очередной обзор выставляется строб большего размера.
При непопадании отметок в несколько стробов подряд (обычно два или три) принимается решение о сбросе цели с сопровождения. Физически это означает очистку области памяти сопровождаемой цели в массиве траекторий.
Во втором случае координаты новой отметки используются при уточнении параметров траектории. По величине отклонений [Хi – Хэ], [Yi – Yэ] и [Hi – Hэ] определяют, применяет ли цель маневр, а затем рассчитывают начальные координаты и составляющие скорости на очередной обзор с учетом сглаживаний или без него. Для этого предварительно рассчитываются или считываются из числа имеющихся в ЭВМ коэффициенты сглаживания k и k .
В третьем случае сначала принимается решение о том, какую отметку из числа попавших в строб следует отнести к анализируемой траектории, а затем по ней выполняются действия, описанные выше. Критерием при принятии решения обычно является минимум отклонения отметки от центра строба. Оставшиеся после отбора отметки подвергаются анализу по отношению к другим траекториям (если отметки попали одновременно в несколько стробов) или относятся к числу отметок, не попавших ни в какой строб. Последние используются алгоритмом автозахвата траектории при завязке новых трасс.
Из приведенного словесного описания алгоритма сопровождения траекторий целей видно, что обработка информации о воздушной обстановке является весьма трудоемким процессом, требующих больших затрат оперативной памяти и быстродействия ЭВМ.
Требования к алгоритмам возрастают с увеличением числа сопровождаемых целей, уменьшением периода обзора РЛС разведки, повышением надежности автозахвата и точности сопровождения целей. В существующих АСУ не менее 60 % вычислительной мощности бортовых ЭВМ расходуется на решение задач обработки информации о воздушной обстановке. Отсюда становится ясно, что при ограниченных ресурсах вычислительной системы процессом обработки информации необходимо управлять. Наиболее точно должны сопровождаться те цели, по которым в данный момент решаются наиболее ответственные задачи. В первую очередь подлежат обработке те отметки, которые находятся в ответственных секторах частей и соединений.
В существующих АСУ управление процессом обработки информации о воздушной обстановке осуществляется боевыми расчетами. С этой целью командиры и операторы контролируют процесс автозахвата и автосопровождения траектории в ответственных секторах. При необходимости они бланкируют области пространства, в которых необходимо исключить автозахват целей. Отдельные цели, которые по каким-либо причинам плохо сопровождаются в режиме АВТОМАТ, обрабатываются оператором.
В ряде систем предусматривается режим обработки данных о воздушной обстановке, который называется ПРОГРАММНЫЙ ОБХОД.
Сущность его состоит в том, что ЭВМ указывает оператору наиболее целесообразный порядок обработки целей или вырабатывает рекомендации по снятию целей с сопровождения. Рекомендации отображаются на индикаторе обстановки с помощью специальных символов.
Реализация в аппаратуре АСУ алгоритмов управления дает значительный выигрыш в точности сопровождения приоритетных целей. Так, для типовых условий сопровождения оптимизация распределения времени по сравнению с его равномерным распределением позволяет уменьшить ошибки сопровождения наиболее важных целей на 25 – 30% при незначительном ухудшении точности проводки других целей.