

2.5. Схемы замещения рельсовых цепей
При расчете, анализе и синтезе рельсовой цепи (РЦ) ее представляют в виде схемы замещения (рис. 2.5), состоящей из каскадного соединения четырёхполюсников Н, К, РЛ.

Рис. 2.5. Общая схема замещения сложной РЦ
Четырёхполюсники К и Н замещают промежуточную и защитную аппаратуру, соответственно, релейного и питающего концов. Четырёхполюсник РЛ замещает только рельсовую линию и называется рельсовым четырёхполюсником. Он может замещать рельсовую линию во всех основных режимах: нормальном, шунтовом и контрольном. При нормальном режиме этот четырёхполюсник характеризуют коэффициенты А, В, С, D.
При проектировании и расчетах РЦ обычно идеализируют и рассматривают как линейные и пассивные.
Некоторые простейшие цепи переменного и постоянного тока можно замещать одним четырёхполюсником РЛ, во внешней цепи которого на питающем конце вместо четырёхполюсника Н включено сопротивление Zн, а на релейном – вместо четырёхполюсника К – сопротивление Zк (рис. 2.6).
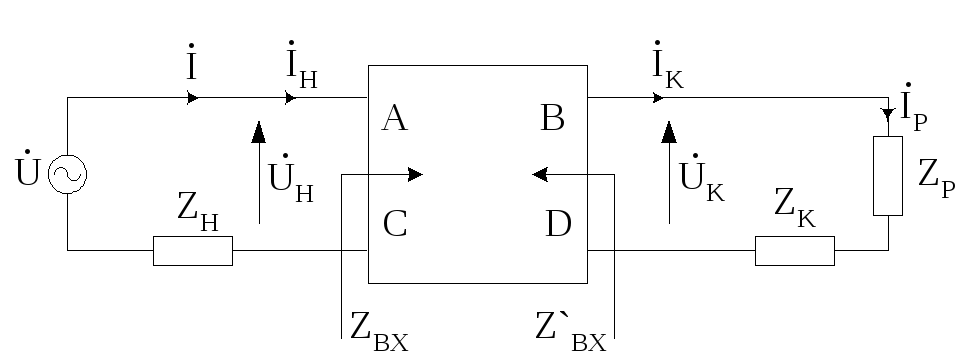
Рис. 2.6. Общая схема замещения простейшей РЦ
При этом Zн замещает сумму сопротивлений Z0 и соединительных проводов rсп, а Zк – сопротивление соединительных проводов на релейном конце rср.
Обычно в теории РЦ переходят от общей схемы к основной (рис. 2.7), благодаря чему упрощаются расчётные формулы, методы анализа и синтеза схем РЦ.

Рис. 2.7. Основная схема замещения РЦ
Для перехода к основной схеме четырёхполюсник К с нагрузкой Zр замещают его прямым входным сопротивлением Zвх.к:
Zвх.к
=
![]() ,
(2.15)
,
(2.15)
где Ак, Вк, Ск, Dк – коэффициенты четырёхполюсника К.
Четырёхполюсник Н замещают его обратным входным сопротивлением:
Z΄вх.н
=
![]() ,
(2.16)
,
(2.16)
где Ан и Вн – коэффициенты четырёхполюсника Н.
Для полученной таким образом основной схемы замещения ток на выходе четырёхполюсника К будет иметь вид:
İк = kтк İр, (2.17)
где kтк = CкZp + Dк – коэффициент снижения тока в четырёхполюснике К.
Этот же ток может быть выражен через сопротивление передачи основной схемы замещения Zпо:
İк
=
![]() ,
(2.18)
,
(2.18)
где
![]() –
напряжение эквивалентного генератора,
определяемое как:
–
напряжение эквивалентного генератора,
определяемое как:
![]() =
=
![]() =
=![]() ,
(2.19)
,
(2.19)
где
![]() –
действительное напряжение генератора;
–
действительное напряжение генератора;
kтн = Ан – обратный коэффициент тока четырёхполюсника Н.
Согласно общей теории четырёхполюсников сопротивление передачи основной схемы замещения Zпо:
Zпо
=
![]() = АZвх.к+
В + (CZвх.к
+ D)Z΄вх.н.
(2.20)
= АZвх.к+
В + (CZвх.к
+ D)Z΄вх.н.
(2.20)
2.6. Расчёт и анализ нормального режима
Нормальным режимом называется такое состояние рельсовой цепи, когда она свободна от подвижного состава и путевой приёмник выдает дискретную информацию «свободно». В нормальном режиме при наихудших условиях необходимо обеспечить уровень сигнала на входе приёмника не меньше некоторого рабочего значения. Наихудшими условиями нормального режима являются такие, при которых уменьшается сигнал на входе приемника рельсовой цепи:
– минимальное напряжение источника питания Umin;
– максимальное сопротивление рельсовых нитей Zp max;
– минимальное сопротивление изоляции или максимальное значение проводимости уи max рельсовой линии;
– максимальное сопротивление элементов согласующих устройств, включенных последовательно с приемником;
– минимальное сопротивление элементов согласующих устройств, включенных параллельно приемнику.
Целью расчёта является определение минимального питающего напряжения Uн min, исходя из неблагоприятных условий: Umin, Zp max, уи max. Для РЦ постоянного тока это сводится к вычислению ограничивающего сопротивления Ro при заданном напряжении аккумулятора Umin, удельном сопротивлении рельсов rmax, удельной проводимости изоляции уи max и тока надёжного срабатывания приёмника Ip = 1,1Icp.
Расчёт ведётся по общей схеме замещения простейшей РЦ, в которой Zк = Rp+rcp; Zн = Ro+rсп, где rcp и rсп – сопротивления соединительных проводов, соответственно, на релейном и питающем концах.
Порядок расчёта:
1) Uк = Ip(Rp + rcp); Iк = Ip.
2) по (2.6) и (2.7) определяют γ, Zв (для rmax, уи max).
3) по (2.10) определяют А, В, С, D.
4) по (2.8, 2.9) определяют Uн min, Iн.
5) Ro
=
![]() -
rсп.
-
rсп.
Для нормального режима очень важной является зависимость изменения рабочего тока в путевом реле от значения сопротивления изоляции для данной рельсовой цепи Ip = f(rи). Из рельсового четырёхполюсника можно вывести соответствующую формулу, затем рассчитать и построить регулировочные характеристики (рис. 2.8).

Рис. 2.8. Регулировочные характеристики
С увеличением сопротивления изоляции ток в РЦ возрастает и тем больше, чем длиннее РЦ. Это объясняется тем, что в длинных РЦ Ro меньше, и в результате возрастания rи в таких РЦ сопротивление передачи уменьшается резче, чем в коротких РЦ. Из приведённых характеристик видно, что в результате увеличения сопротивления изоляции ток в путевом реле может достигать значительных величин, что может пагубно отразиться на шунтовом режиме. Поэтому РЦ должна быть спроектирована таким образом, чтобы она надёжно и устойчиво работала во всех режимах при изменении сопротивления изоляции во всём диапазоне от rи min до rи max.
Для расчёта нормального режима РЦ переменного тока используют общую схему замещения сложной РЦ. Для удобства четырёхполюсники «Н» и «К» рассматривают состоящими из двух четырёхполюсников, один из которых замещает дроссель-трансформатор (ДТ), а другой – остальную аппаратуру. ДТ представляют в виде эквивалентной схемы, состоящей из каскадного соединения Т-образной схемы замещения и идеального трансформатора с известным коэффициентом трансформации. Коэффициенты А, В, С, D, «Н» и «К» определяют перемножением матриц составляющих четырёхполюсников.