

2.3 Описание алгоритма поиска экстремума с запоминанием экстремума
Рассмотрим более подробно описанный выше алгоритм поиска экстремума с запоминанием экстремума.
Алгоритм запоминания экстремума заключается в использовании разности между текущим и экстремальным значением выходной величины для нахождения момента реверса системы и имеет вид:
 =
V1,V(0)
= V1>0
(2.19)
=
V1,V(0)
= V1>0
(2.19)
Функция V(t) меняет знак на противоположный в моменты времени t , для которых выполняется соотношение:
ρ(tj) = -A0, ρ'(tj)<0 , (2.20)
где
p(t) = q(t) - max q(τ),
0< τ < t,
A0
> 0 , ρ'(t)= .
.
В силу этого алгоритма в вычислительном устройстве запоминается максимальное значение выходного сигнала q измерительного устройства, реализовавшееся до текущего момента времени t и непрерывно вычисляется функция:
ρ(t) = q(t) - max q(τ)
0 < τ ≤ t
Если измерительный прибор и линейная часть модели производственного процесса не слишком инерционны, то процесс поиска экстремума происходит следующим образом.
В начальный момент t = 0,V(0) = V1 > 0 и координата х начинает
увеличиваться. Если х(0) находится слева от точки х*, в которой достигается у* - максимум нелинейной характеристики, то точка х движется к х*, функция ρ(t) при тождественно равна 0, т.к. max q(t), 0 < τ ≤ t достигается в текущий момент времени t. При этом переключения функции V(t) не происходит пока точка х не перескочит положение х*, величина у, а значит и Z и q не начнут уменьшаться, функция ρ(t) станет отрицательной, т.к. max q(t) > q(t), 0 < τ ≤ t. В силу приведенного правила переключение произойдет при ρ(t) = -А0, когда точка х окажется на
нисходящей ветви нелинейной характеристики на некотором расстоянии права от х* (рисунок 2.5).
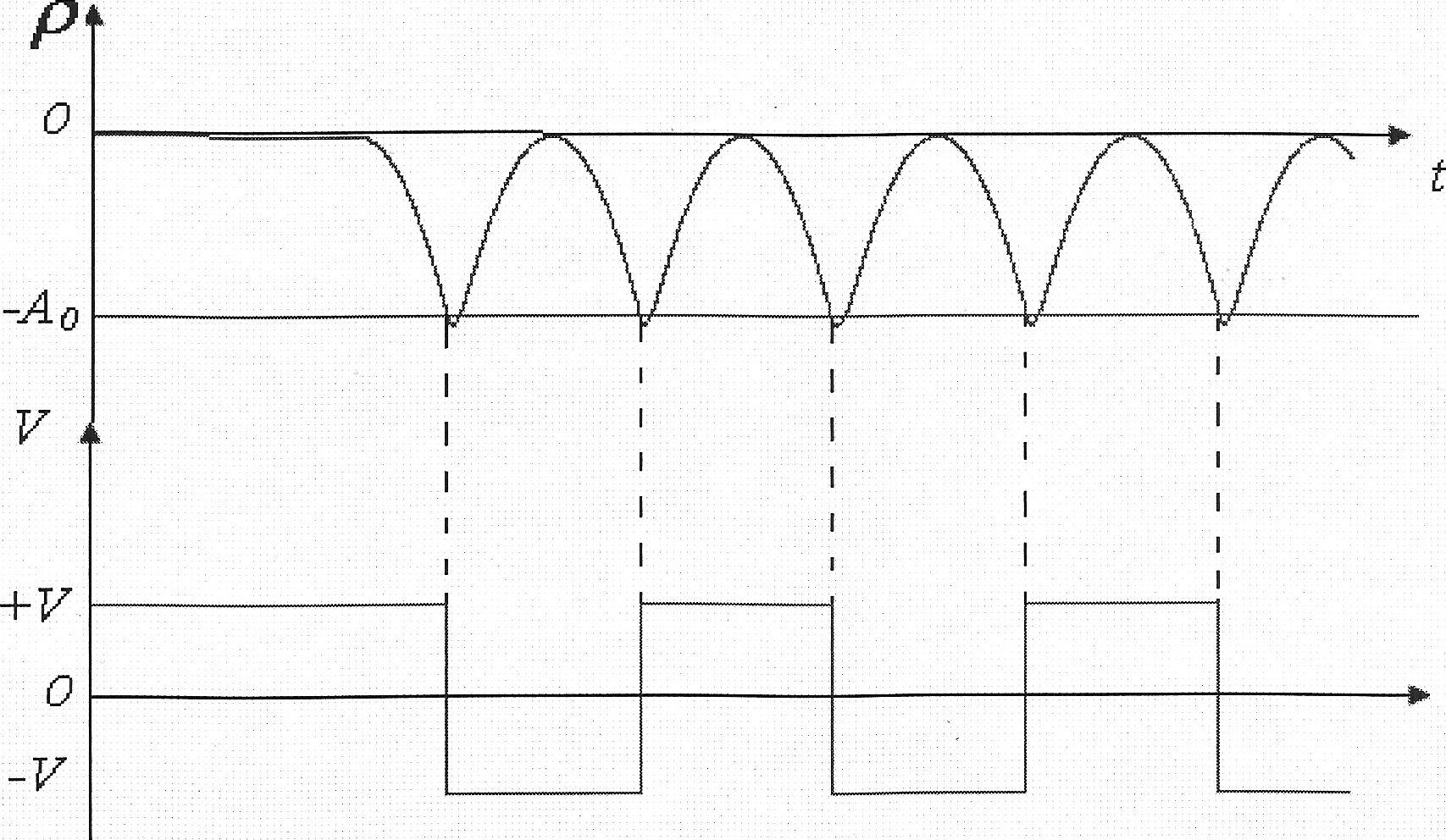
Рисунок 2.5 - Поиск экстремума с запоминанием
После переключения V(t) начинается возвратное движение точки х, при
котором она через некоторое время окажется слева от х и второе переключение произойдет, когда снова, уменьшаясь, функция ρ(t) не достигнет -А0. Далее возникает колебательное движение точки х в некоторой двусторонней окрестности точки х’, а значит и выходной координаты Z относительно ее максимального значения (рисунок 2.6)
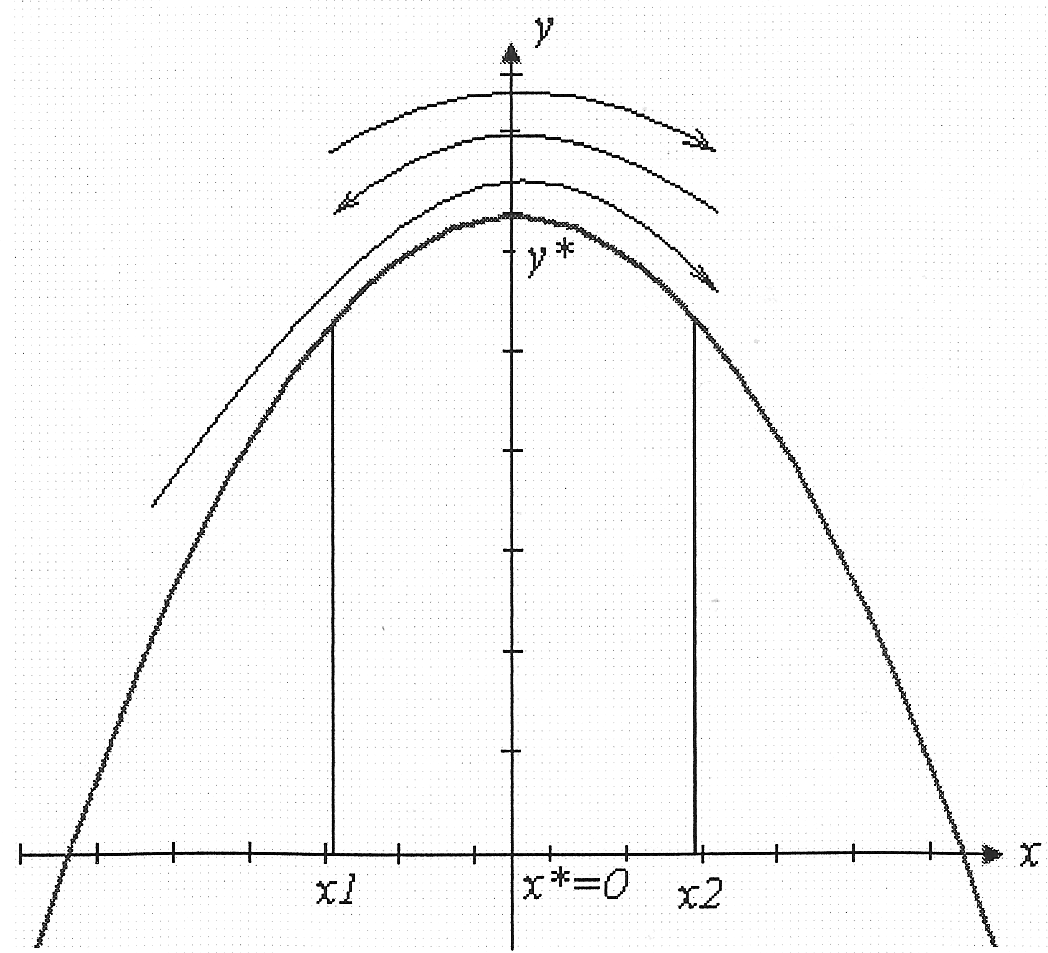
Рисунок 2.6 - Колебательные движения в окрестности экстремума
Если начальное положение х(0) точки х находится правее точки х*, то сначала точка х удаляется от х*, поскольку V(0) = V1>0, затем происходит переключение и дальнейший процесс аналогичен описанному выше.
Параметры V1 и А0 в законе управления выбираются так, чтобы обеспечить
попадание величины Z(t) в заданную достаточно малую окрестность Zmax за приемлемое время и дальнейшее пребывание ее в этой окрестности, т.е. выполнении неравенства:
![]() (2.21)
(2.21)
Чем больше величина V1, тем быстрее изменяется координата x(t), а значит и Z(t) и тем быстрее Z(t) может попасть в окрестность точки Zmax.
Однако при увеличении Vl возрастают динамические ошибки
воспроизведения входных сигналов линейной частью математической модели и измерительным устройством. Это может привести к “проскакиванию“ координатой Z(t) своего максимального значения Zmax и к дальнейшим колебаниям относительно Zmax со значительной амплитудой. При малых значениях V1 перемещение Z(t) в точку Zmax произойдет за значительное время.