

Точность сау на установившемся режиме
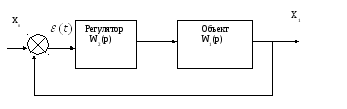
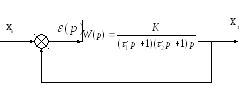
Рассмотрим структурную схему САУ
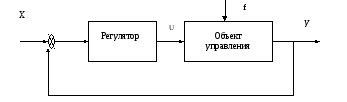
Пусть передаточная функция объекта по управляющему воздействию
![]()
Пусть передаточная функция объекта по возмущению
![]()
Пусть передаточная функция регулятора
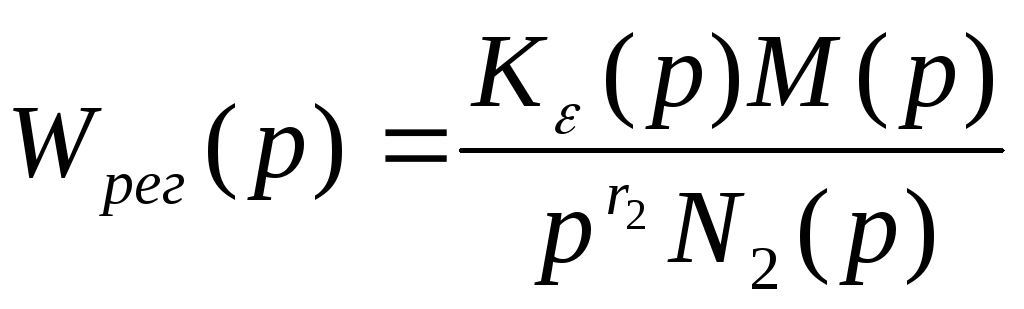
Тогда

Обозначим общий коэффициент усиления
![]()
Тогда
![]() .
.
Запишем управляющее воздействие
![]()
При
![]()
![]() - т.е. это постоянное воздействие
- т.е. это постоянное воздействие
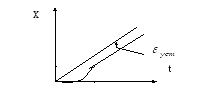
При
![]()
![]() - это линейное воздействие , т.е.
воздействие, изменяющееся с постоянной
скоростью, «линейка».
- это линейное воздействие , т.е.
воздействие, изменяющееся с постоянной
скоростью, «линейка».
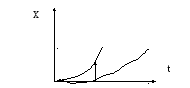
При
![]()
![]() - это парабола, воздействие, изменяющееся
с постоянным ускорением, «парабола».
- это парабола, воздействие, изменяющееся
с постоянным ускорением, «парабола».
Для устойчивой
системы можно вывести зависимость
ошибки на установившемся режиме
![]() от структуры системы ( есть или нет в
структуре интегрирующие звенья и сколько
их) и порядка полинома управляющего и
возмущающего воздействий.
от структуры системы ( есть или нет в
структуре интегрирующие звенья и сколько
их) и порядка полинома управляющего и
возмущающего воздействий.
Результаты сведем в таблицу.
Зависимость
установившейся ошибки
![]()
![]()
по управляющему воздействию
Таблица 1
1.
![]()
![]()
2.
![]()
![]()
3.
![]()
![]()
4.
![]()
![]()
Системы, у которых
![]() -
это астатические системы
-
это астатические системы![]() порядка.
порядка.
В статических
системах
![]() .
.
Рассмотрим примеры.
Статическая система.
1.
![]()
![]() .
Это
.
Это
![]() - случай.
- случай.
![]()
2.
![]()
![]() - это2- случай.
- это2- случай.
![]()

Астатическая система 1-го порядка.
1.![]() ,
,![]() .
.![]() . Это1-случай
.
. Это1-случай
.
![]() .
.
2.
![]()
![]()
![]() Это3 случай.
Это3 случай.
![]()
3.
![]()
![]()
![]() Это2 случай.
Это2 случай.
![]()
![]()
Таким образом, для повышения точности систем на установившемся режиме по управляющему воздействию надо увеличивать порядок астатизма и коэффициент усиления К. Но эти меры могут привести к нарушению устойчивости, для восстановления которой надо вводить дополнительные корректирующие устройства.
Ошибка системы на установившемся режиме
по возмущающему воздействию.
Возмущающие
воздействия описываются также, как и
управляющие воздействия:
![]()
Ошибки
системы по возмущающему воздействию
зависят от количества
интегрирующих звеньев в регуляторе
![]() и порядка полинома воздействия.
и порядка полинома воздействия.
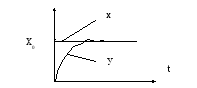
При этом приведенные
в таблице ниже соотношения определяют
установившееся значение выходной
величины
![]() .
.
Таблица 2
1.
![]() ,
,![]()
2.
![]() ,
,![]()
3.
![]() ,
,![]()
4.
![]() ,
,![]()
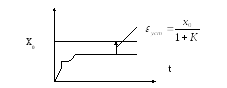
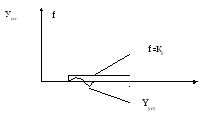
Системы, имеющие
регулятор
с астатизмом 1-го
порядка при постоянном возмущении (![]()
![]() - это1-ый
случай) имеют установившееся значение
- это1-ый
случай) имеют установившееся значение
![]()
При линейно-
возрастающем возмущающем воздействии
(![]()
![]() это 3-ий
случай)
это 3-ий
случай)
![]() изменяется на темменьшую
величину, чем больше
К.
изменяется на темменьшую
величину, чем больше
К.

Пример. Определить
ошибку в установившемся режиме для
системы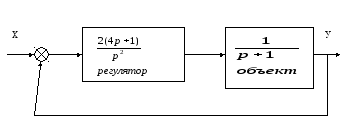
1)
![]()
2)
![]()
3)
![]()
Проверим устойчивость системы.
Характеристическое уравнение
![]()
По критерию
устойчивости Гурвица
![]()
![]() и САУ устойчива.
и САУ устойчива.
1 случай
![]()
![]()
![]() Это 2 случай из таблицы 1.
Это 2 случай из таблицы 1.![]()
2 случай
![]()
![]()
![]() Это3 случай
из таблицы
1.
Это3 случай
из таблицы
1.![]() (К=2)
(К=2)
3 случай
![]()
![]()
![]() Это1=ый
случай
из таблицы
1.
Это1=ый
случай
из таблицы
1.
![]()
Коэффициенты ошибок
Точность САУ по управляющему воздействию можно определить по коэффициентам ошибок.
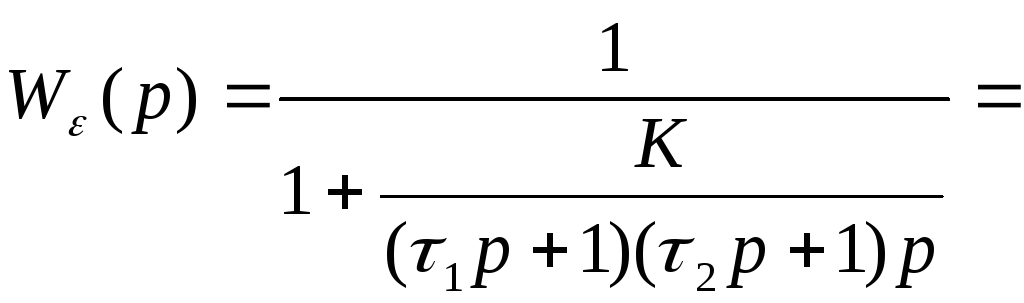
Рассмотрим САУ
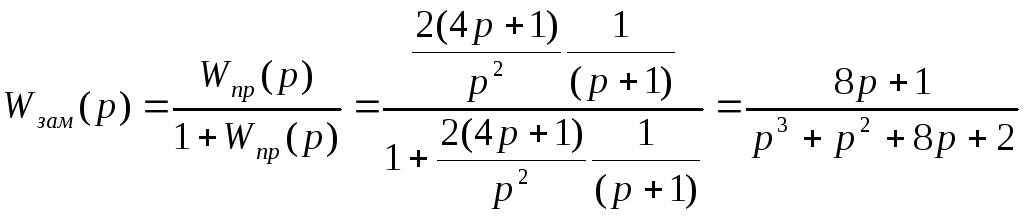
Передаточная функция замкнутой системы по ошибке
![]()
Разложим
![]() в степенной ряд Маклорена при
в степенной ряд Маклорена при![]() (
(![]() ).
Ряд Маклорена – частный случай ряда
Тейлора, когда разложение идет в
окрестности
).
Ряд Маклорена – частный случай ряда
Тейлора, когда разложение идет в
окрестности![]()
![]()
Представим ряд Маклорена иначе:
![]()
Здесь С0,
С1,
С2
…. – коэффициенты ошибок, Их физический
смысл – производные передаточных
функций в окрестности
![]() (
(![]() ),
т.е. в установившемся режиме.
),
т.е. в установившемся режиме.
Пусть передаточная функция имеет вид:
 .
.
Напомним, производная от дроби
 =
=
![]() ,
,
![]()
![]()
(

Рассмотрим систему с астатизмом первого порядка.
Пусть
![]() ,
,![]()
Тогда
![]() ,
,
т.е.
![]()
Тогда
![]()
![]()
![]() и
и
![]() т.е
т.е![]() и нет статической ошибки.
и нет статической ошибки.
Рассмотрим систему с астатизмом второго порядка.
Пусть
![]() ,
,![]()
Тогда

Значит,
![]()
![]() и
и![]()
![]()
![]()
Следовательно , можно сделать вывод:
![]() -
статическая ошибка по управляющему
воздействию при ступенчатом воздействии,
-
статическая ошибка по управляющему
воздействию при ступенчатом воздействии,
![]() -
статическая ошибка по управляющему
воздействию по скорости,
-
статическая ошибка по управляющему
воздействию по скорости,
![]() -
статическая ошибка по управляющему
воздействию по ускорению.
-
статическая ошибка по управляющему
воздействию по ускорению.
Пример.
![]()
Это система с одним интегрирующим звеном. Причем не отмечено, где оно находится- в объекте или в регуляторе.
Эта система ведет себя одинаково (см. таблицу 3 случаи 2 и 3) при различных управляющих воздействиях: скачке, «линейке», «параболе».
Найдем коэффициенты ошибок и сравним их с таблицей 3.
Передаточная функция замкнутой системы по ошибке:
Здесь
![]()
![]()
Обозначим коэффициенты в числителе
![]()
![]()
![]()
![]() .
.
Коэффициенты в знаменателе:
![]()
![]()
![]()
![]()
Тогда ошибка при скачке:
![]()
Ошибка при «линейке» (при сигнале, изменяющемся с постоянной скоростью)
![]()
Ошибка при «параболе» (при сигнале, изменяющемся с постоянным ускорением)
 =
=![]() =
=![]()
![]()
![]()
![]()
Изменение ошибки во времени:
![]()
Скачок:
![]() ,
,![]()
![]()
![]()
«Линейка»
![]() ,
,![]()
![]()
![]()
![]()
«Парабола»
![]()
![]()
![]()
![]()
![]() 0+
0+
![]()
![]()
При
![]() третий член- постоянная величина, а
второй – стремится к бесконечности.
Т.о.
третий член- постоянная величина, а
второй – стремится к бесконечности.
Т.о.![]()