

ДИНАМИКА
СООРУЖЕНИЙ
ДИНАМИКА СТЕРЖНЕВЫХ СИСТЕМ
С РАСПРЕДЕЛЁННЫМИ2 МАССАМИ

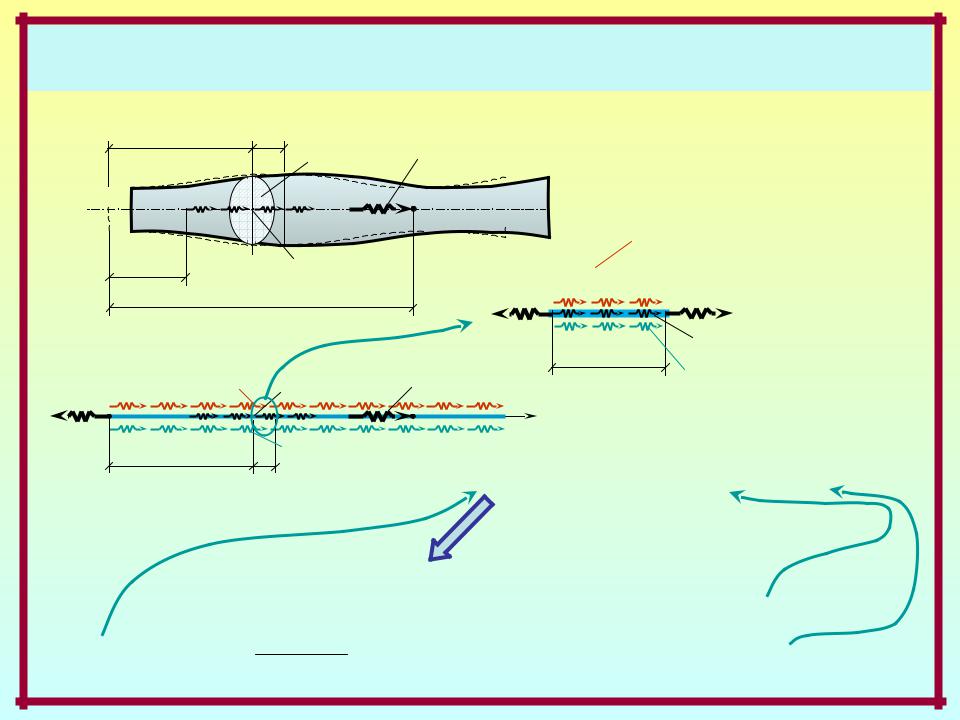
Динамическое растяжение/сжатие |
|
|
||||||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||
|
x |
u(x,t) |
|
|
~ |
(x) |
~ |
|
~ |
|
|
|||
|
F(t) |
m |
mсоб(x) mпр(x) |
|
||||||||||
|
|
|
A(x) |
|
|
|
|
~ |
|
|
||||
|
|
|
|
|
|
ρ(x) A(x) mпр(x) |
|
|||||||
|
|
|
|
|
|
|
|
интенсивность |
|
|
|
|||
aq |
|
|
q(x,t) |
|
|
|
|
сил инерции |
|
|
|
|
||
|
|
|
|
|
q (x,t) |
N(x,t) N(x,t) dx |
||||||||
|
|
aF |
|
|
N(x,t) |
in |
|
|
|
x |
|
|||
|
|
|
|
|
|
|
|
|
||||||
|
qin(x,t) q(x,t) |
F(t) |
dx |
q(x,t) |
|
|
|
|||||||
N0 (t) |
qf (x,t) |
– сопротивление |
||||||||||||
|
|
|||||||||||||
|
|
|
|
|
x |
1. Статическая |
вязкой среды |
|||||||
0 |
x |
|
qf (x,t) |
|
|
N(x,t) |
сторона задачи: |
x = 0 |
|
|||||
|
|
|
|
q(x,t) qin(x,t) |
qf |
(x,t) |
( 1) |
|||||||
|
|
dx |
|
|
x |
|
|
|
|
|
|
|||
2. Геометрическая сторона задачи |
|
3. Физическая сторона задачи: |
|
|||||||||||
(соотношение Коши): |
|
|
|
|
|
N (x,t) |
( 3а) |
|||||||
ε(x,t) |
u(x,t) |
( 2) |
|
– закон Гука: |
ε(x,t) EA(x) |
|||||||||
x |
|
|
– закон |
|
|
~ |
|
|
|
|
||||
N(x,t) EA(x) u(x, t) |
|
|
инерции: qin (x,t) m (x)u(x, t)( 3б) |
|||||||||||
|
– модель |
|
|
|
|
|
|
|||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
вязкого qf (x,t) kf (x)u(x,t)( 3в) |
|||||||||
|
|
|
|
|
|
трения: |
|
|
|
|
|
|
||
|
Динамическое растяжение/сжатие |
|
|||||||
прямолинейного стержня с распределённой массой |
|||||||||
|
x |
u(x,t) |
|
~ |
~ |
|
~ |
|
|
|
F(t) |
m |
(x) mсоб(x) mпр(x) |
|
|||||
|
|
A(x) |
|
|
|
~ |
|
||
|
|
|
|
ρ(x) A(x) mпр(x) |
|
||||
|
|
|
|
|
интенсивность |
|
|
||
|
aq |
q(x,t) |
|
|
сил инерции |
|
|
|
|
|
|
|
q (x,t) |
N(x,t) N(x,t) dx |
|||||
|
|
aF |
N(x,t) |
in |
|
|
x |
|
|
|
|
|
|
|
|
||||
|
qin(x,t) q(x,t) |
F(t) |
|
dx |
q(x,t) |
|
|
||
N0 (t) |
|
qf (x,t) |
– сопротивление |
||||||
|
|
||||||||
|
|
|
x |
1. Статическая |
вязкой среды |
||||
0 |
x |
qf (x,t) |
|
N(x,t) |
сторона задачи: |
x = 0 |
|
||
|
|
q(x,t) qin(x,t) |
qf (x,t) |
( 1) |
|||||
|
|
dx |
|
x |
|
|
|
|
|
|
|
|
|
3. Физическая сторона задачи: |
|
||||
N(x,t) EA(x) u(x, t)
x
– закон ( ) ~ ( ) ( , )
инерции: qin x,t m x u x t
–модельвязкого qf (x,t) kf (x)u(x,t)
трения:

|
|
Динамическое растяжение/сжатие |
|
|||||||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||||
|
|
x |
u(x,t) |
|
|
|
|
|
~ |
~ |
~ |
|
||||
|
|
|
|
F(t) |
|
m |
(x) mсоб(x) mпр(x) |
|
||||||||
|
|
|
|
A(x) |
|
|
|
|
|
~ |
|
|||||
|
|
|
|
|
|
|
|
|
ρ(x) A(x) mпр(x) |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
|
|
||
|
|
aq |
|
q(x,t) |
|
|
|
|
|
сил инерции |
|
|
|
|||
|
|
aF |
|
N(x,t) |
|
q (x,t) |
N(x,t) N(x,t) dx |
|||||||||
|
|
|
|
|
|
|
|
in |
|
|
x |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
qin(x,t) q(x,t) |
|
F(t) |
|
|
|
dx |
q(x,t) |
|
|
|||||
N0 (t) |
|
|
|
|
qf (x,t) |
– сопротивление |
||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
x |
1. Статическая |
вязкой среды |
||||||
|
0 |
x |
|
qf (x,t) |
|
|
N(x,t) |
сторона задачи: |
x = 0 |
|
||||||
|
|
dx |
|
|
q(x,t) qin(x,t) |
qf (x,t) |
( 1) |
|||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
||
|
|
EA(x) |
u(x, t) |
|
~ |
|
2u(x, t) |
k f (x) |
u(x, t) |
q (x,t) |
||||||
|
x |
|
m (x) |
|
t2 |
|
t |
|||||||||
x |
|
|
|
|
|
|
|
|
|
|
|
|||||

|
|
|
Динамическое растяжение/сжатие |
|||||||||||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||||||||
|
|
|
x |
|
u(x,t) |
|
|
|
|
|
|
~ |
(x) |
|
~ |
|
|
~ |
||
|
|
|
|
|
|
|
F(t) |
|
|
m |
mсоб(x) |
mпр(x) |
||||||||
|
|
|
|
|
|
A(x) |
|
|
|
|
|
ρ(x) A(x) |
|
~ |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
mпр(x) |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
|||
|
|
|
aq |
|
|
q(x,t) |
|
|
|
|
|
|
|
|
сил инерции |
|
||||
|
|
|
|
aF |
|
N(x,t) |
|
q (x,t) |
N(x,t) N(x,t) dx |
|||||||||||
|
|
|
|
|
|
|
|
|
|
in |
|
|
|
|
x |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
q |
|
(x,t) |
q(x,t) |
|
F(t) |
|
|
|
|
dx |
|
q(x,t) |
|||||
N0 (t) |
in |
|
|
|
|
|
|
qf (x,t) |
– сопротивление |
|||||||||||
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
x |
|
|
|
вязкой среды |
|||||||||||
|
0 |
x |
|
|
qf (x,t) |
|
|
|
Частные случаи: |
|||||||||||
|
|
|
1. Дифференциальное уравнение |
|||||||||||||||||
|
|
|
|
dx |
||||||||||||||||
|
|
|
|
|
вынужденного движения растянутого/сжатого |
|||||||||||||||
|
|
|
|
|
|
прямолинейного стержня переменного сечения |
||||||||||||||
|
|
|
|
|
|
|
|
с неравномерно распределённой массой, |
||||||||||||
|
|
|
|
|
|
|
без(сопротивленучёта демпфированияе – по модели(сопротивленияФойгта) ) |
|||||||||||||
|
|
|
|
|
u(x, t) |
|
|
~ |
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
u(x,t) |
|
~ |
u(ux(,xt,)t) |
||||||||||
|
EA(x) |
|
|
|
|
|
|
|
|
|
|
q (qx,(x,t)t) |
||||||||
|
|
|
|
EAm ((xx)) |
|
|
|
km((xx)) |
|
|
||||||||||
x |
|
|
|
x |
x |
|
|
|
|
2 |
|
|
f |
|
|
t |
2 |
|
||
|
|
|
|
|
|
|
|
|
|
t |
|
|
|
|
|
|
t |
|
|
|
– уравнение в частных производных с переменными коэффициентами |
||||||||||||||||||||

|
Динамическое растяжение/сжатие |
|
||||||||||||||||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||||||||||||
|
x |
u(x,t) |
|
|
|
|
|
|
~ |
|
|
|
|
~ |
|
|
|
|
~ |
|
|
|||
|
|
|
F(t) |
|
|
m |
(x) mсоб(x) |
mпр(x) |
||||||||||||||||
|
|
|
A(x) |
|
|
|
|
|
ρ(x) A(x) |
|
~ |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
mпр(x) |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
|
|
||||||
|
aq |
|
q(x,t) |
|
|
|
|
|
|
|
|
|
|
|
сил инерции |
|
|
|
||||||
|
aF |
|
|
|
N(x,t) |
|
q |
in |
(x,t) |
|
N(x,t) N(x,t) dx |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
qin(x,t) |
q(x,t) |
|
F(t) |
|
|
|
|
|
dx |
|
|
q(x,t) |
|
|
|
||||||||
N0 (t) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
Частные случаи: |
|||||||||||||
0 |
x |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
21. Дифференциальное уравнение |
||||||||||||||||||||
|
dx |
|
|
|
||||||||||||||||||||
|
|
вынужденного движения растянутого/сжатого |
||||||||||||||||||||||
|
|
|
прямолинейного стержня постоянногоереме госечения |
|||||||||||||||||||||
|
|
|
|
сснеравномерноравномерно распределённноймасссой, |
||||||||||||||||||||
|
|
|
без учёта демпфирования (сопротивления) |
|||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
~ |
|
|
|
2 |
|
|
2 |
u(x, t) |
|
|
||||
|
|
|
|
|
|
|
u(x, t) |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
u(x,t) |
|
|
|
|
~u(x,t) |
|
|
q(x,t) |
|||||||||||||
|
|
ВолновоеEA(x) |
|
|
|
m |
|
m |
(x) |
|
|
|
|
|
q (x,t) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
x |
|
|
x |
2 |
x |
EA |
|
|
|
t |
2 |
|
|
t |
2 |
|
EA |
||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
уравнение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
– уравнение в частных производных с постояннымиереме коэффициентами |
||||||||||||||||||||||||

|
|
Динамическое растяжение/сжатие |
|||||||||||||||||
прямолинейного стержня с распределённой массой |
|||||||||||||||||||
|
|
x |
u(x,t) |
|
|
|
|
|
~ |
|
|
~ |
|
|
|
|
~ |
||
|
|
|
F(t) |
|
|
m |
(x) mсоб(x) |
mпр(x) |
|||||||||||
|
|
|
|
A(x) |
|
|
|
|
ρ(x) A(x) |
|
|
~ |
|||||||
|
|
|
|
|
|
|
|
|
|
mпр(x) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
||||||
|
|
aq |
q(x,t) |
|
|
|
|
|
|
|
|
сил инерции |
|
|
|||||
|
|
|
|
|
|
|
|
q |
(x,t) |
|
N(x,t) N(x,t) dx |
||||||||
|
|
|
aF |
|
|
|
N(x,t) |
in |
|
|
|
|
|
|
x |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
qin(x,t) q(x,t) |
|
F(t) |
|
|
|
dx |
|
q(x,t) |
|
||||||||
N0 (t) |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
Частные случаи: |
||||||||||
0 |
|
x |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
2.3 Дифференциальное уравнение |
|||||||||||||||
|
|
dx |
|
|
|||||||||||||||
|
|
|
гармоническоговынужденн го движенияения растянутого/сжатогого |
||||||||||||||||
Решение уравнения: |
прямолинейного стержня постоянного сечения |
||||||||||||||||||
u(x,t) |
u (x,t) |
u (x,t) |
|||||||||||||||||
|
|
|
|
с равномерно распределённой массой, |
|||||||||||||||
u(x,t) uj(x) sin( ω j t 0 j ) без учёта демпфирования (сопротивления) |
|||||||||||||||||||
|
j 1 |
|
|
|
2 |
2 |
|
|
|
~ |
|
2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
d u(x) |
|
~ |
|
|
|
|
|
|
q(x) |
||||
полигармоническая |
Волновое |
|
|
mω |
F u(x,t) |
|
|||||||||||||
u(x,t) |
|
|
m |
|
|
|
|
q(x,t) |
|||||||||||
|
|
|
|
|
|
|
2 2 |
|
|
|
u(x) |
|
|
|
|||||
собственная |
|
|
|
|
|
|
|
|
2 |
|
|
EAEA |
|||||||
|
уравнение |
|
dx |
|
EAEA |
t |
|
|
|
|
|||||||||
составляющая |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
– уравнение в частных производных–уравнениесвпостояннымиамплитудах перемещенийкоэффициентами |
|||||||||||||||||||

|
|
Динамическое растяжение/сжатие |
|||||||||||||
прямолинейного стержня с распределённой массой |
|||||||||||||||
|
|
x |
|
u(x,t) |
|
|
|
~ |
|
|
~ |
|
~ |
||
|
|
|
F(t) |
|
m |
(x) mсоб(x) |
mпр(x) |
||||||||
u (t) |
|
|
|
|
|
A(x) |
|
|
ρ(x) A(x) |
~ |
|||||
|
|
|
|
|
|
|
|
|
mпр(x) |
||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
||
|
aq |
|
|
|
q(x,t) |
|
|
|
|
|
|
сил инерции |
|||
|
|
aF |
|
N(x,t) |
q |
(x,t) |
N(x,t) N(x,t) dx |
||||||||
|
|
|
|
|
|
in |
|
|
|
x |
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
qin(x,t) |
q(x,t) |
F(t) |
|
|
dx |
q(x,t) |
|||||||
N0 (t) |
|
|
|
|
|
||||||||||
|
|
x |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
Частные случаи: |
||||||
0 |
|
x |
|
|
|
|
|
|
|||||||
|
|
|
|
3. Дифференциальное уравнение |
|||||||||||
|
|
dx |
|
||||||||||||
|
|
|
|
гармонического движения растянутого/сжатого |
|||||||||||
Решение уравнения: прямолинейного стержня постоянного сечения |
|||||||||||||||
При q(x) = const = q |
с равномерно распределённой массой, |
||||||||||||||
u(x) u cos kx |
|
N0 |
sin kx |
|
|
|
|
|
|
|
|
|
|||
|
0 |
|
|
kEA |
|
без учёта демпфирования (сопротивления ) |
|||||||||
|
F |
|
|
|
|
2 |
u(x) |
|
~ |
2 |
|
|
q(x) |
||
|
sin k(x |
aF ) |
d |
|
mωF |
u(x) |
|||||||||
|
dx2 |
EA |
|
EA |
|||||||||||
qkEA |
|
|
|
|
|
|
|
|
|
||||||
k2EA 1 |
cos k(x |
aq ) |
– уравнение в амплитудах перемещений |
||||||||||||

Динамическое растяжение/сжатие |
|
|
||||||||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||||
|
x |
u(x,t) |
|
|
|
|
~ |
|
~ |
|
|
~ |
|
|
||
|
|
F(t) |
m (x) mсоб(x) |
mпр(x) |
|
|
||||||||||
u (t) |
|
|
A(x) |
ρ(x) A(x) |
~ |
|
|
|||||||||
|
|
|
|
|
mпр(x) |
|
|
|||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aq |
|
|
q(x,t) |
|
|
|
|
Частные случаи: |
|
|||||||
|
aF |
|
|
43. Дифференциальное уравнение |
||||||||||||
|
|
|
|
|
|
|||||||||||
|
|
q(x,t) |
|
F(t) |
собственныхгармоническогоколебанийдвижения |
|||||||||||
N0 (t) |
qin(x,t) |
|
||||||||||||||
|
|
|
|
|
|
|
|
растянутого/сжатого |
||||||||
0 |
x |
|
|
|
|
|
|
x прямолинейного стержня |
||||||||
|
|
|
|
|
|
|
постоянного сечения |
|||||||||
F(t) = F |
|
dx |
|
|
с равномерно распределённой массой, |
|||||||||||
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
|
~ 2 |
||
|
|
|
|
без учёта демпфирования (сопротивления) |
||||||||||||
q(x,t) = q(x) |
|
|
d u(xd)u(x2) |
2 |
|
q(x) |
|
|
mωF |
|||||||
|
|
|
|
|
k |
uk(x)u(x) 0 , где k |
|
EA |
||||||||
u(x,t) = u(x) |
* sin t t |
dx2 |
dx2 |
|
|
EA |
|
|
|
|||||||
qin(x,t) = qin |
(x) |
|
F |
– уравнение в амплитудах перемещений |
|
|
||||||||||
u0(t) = u0 |
|
Решение уравнения по МНП при q(x) = const0: |
= q : |
|
|
|||||||||||
N0(t) = N0 |
|
|
|
|||||||||||||
u(x) u cos kx N0 |
sin kx |
|
|
F sin k(x a )) |
|
q |
1 |
cos k (x aq) |
||||||||
0 |
|
|
|
|
|
|
F |
|
2 |
|
|
|
|
|
||
|
|
kEA |
|
|
|
kEA |
|
F(t) – сила инерции точечной |
||||||||
|
|
|
|
|
|
|
|
k EA |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
массы или реакция |
||||
|
|
|
|
|
|
|
|
|
|
упругой продольной связи |
||||||

|
|
|
|
Динамическое кручение |
|
|
|
|
|
|
|||||||||||||||
прямолинейного стержня с распределённой массой |
|||||||||||||||||||||||||
|
|
|
x |
|
(x,t) |
– угол закручивания |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
M(t) |
|
|
|
~ |
(x) ρ(x) A(x) |
|
|
|
|
||||||||||
|
|
|
|
|
A(x) |
|
|
|
|
|
m |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
инерционных |
|
|
|
|
|
||||
a |
|
|
|
|
m(x,t) |
|
|
|
|
|
(x,t) |
моментов |
|
Mt (x, t) |
|
||||||||||
m |
|
|
|
Mt (x,t) |
|
|
in |
|
|
Mt (x, t) |
dx |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
x |
|
|||||||||||||
|
|
|
|
aM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M0 (t) |
|
|
min(x,t) |
|
|
|
M |
|
|
|
|
|
|
|
dx |
m(x,t) |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
(t) |
|
|
|
|
x |
|
|
1. Статическая |
|
mx = |
||||||
0 |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
сторона задачи: |
||||||||
|
|
|
m(x,t) |
|
|
|
|
|
Mt(x, t) |
m(x,t) m (x,t) |
( 1) |
||||||||||||||
|
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
|
|
in 0 |
|
|||
2. Геометрическая сторона задачи |
|
3. Физическая сторона задачи: |
|
||||||||||||||||||||||
(погонный угол закручивания): |
|
|
|
|
|
|
|
|
|
Mt |
(x, t) |
( 3а) |
|||||||||||||
θ(x,t) |
(x, t) |
( 2) |
|
|
|
|
|
– закон Гука: |
x,t) GI |
(x) |
|||||||||||||||
|
x |
|
|
|
|
|
|
– закон |
|
|
m ( |
|
~ |
|
t |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
инерции: |
t) I |
(x) |
(x, t) |
( 3б) |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
in |
2 |
~m |
|
|
|
|||||||||
|
|
|
|
|
(x, t) |
|
(x,t) |
|
|
|
|
|
|
(x,t) |
|
|
|
||||||||
Mt (x,t) GIt (x) |
|
|
GIt (x) |
|
|
|
|
I p(x) |
I |
(x) |
ρ I |
|
) |
||||||||||||
x |
|
|
x |
|
|
|
m |
|
|
mp(x,t) |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
|
|
|
||||
|
|
|
Динамическое кручение |
|
|
|
|
|||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||||
|
|
x |
(x,t) |
– угол закручивания |
|
|
|
|
|
|
|
|||||
|
|
|
|
M(t) |
|
~ |
(x) ρ(x) A(x) |
|
|
|
||||||
|
|
|
A(x) |
|
|
|
m |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
|
|
|
||
|
|
|
|
|
|
|
|
m |
|
инерционных |
|
|
|
|||
a |
|
|
m(x,t) |
|
|
|
(x,t) |
моментов |
Mt (x, t) |
|
||||||
m |
|
|
Mt (x,t) |
in |
|
Mt (x, t) |
dx |
|||||||||
|
|
|
|
|
|
|
x |
|||||||||
|
|
|
aM |
|
|
|
|
|
|
|
|
|
|
|||
M0 (t) |
|
min(x,t) |
|
|
M |
|
|
|
dx |
m(x,t) |
|
|
|
|||
|
|
|
|
|
|
(t) |
|
x |
|
1. Статическая |
|
|
|
|||
0 |
|
x |
|
|
|
|
|
|
|
сторона задачи: mx = |
||||||
|
m(x,t) |
|
|
|
Mt(x, t) |
m(x,t) |
|
m (x,t) |
( 1) |
|||||||
|
|
|
|
|
|
|
|
x |
|
|||||||
|
|
|
dx |
|
|
|
|
|
|
|
|
|
|
in 0 |
||
|
|
|
|
|
Дифференциальное уравнение |
|
||||||||||
|
|
|
|
|
вынужденного движения при кручении |
|
||||||||||
|
|
|
прямолинейного стержня переменного сечения |
|||||||||||||
|
|
|
|
с неравномерно распределённой массой, |
||||||||||||
|
|
|
без учёта демпфирования (сопротивления ) |
|||||||||||||
|
|
|
GIt (x) |
(x,t) |
|
|
|
2 (x,t) |
m(x,t) |
|||||||
|
|
|
|
x |
I p(x) |
t2 |
|
|||||||||
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
||

|
|
|
|
Динамическое кручение |
|
|
|
|
|
||||||||||||||||||
прямолинейного стержня с распределённой массой |
|||||||||||||||||||||||||||
|
|
x |
|
(x,t) |
– угол закручивания |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
M(t) |
|
|
~ |
(x) ρ(x) A(x) |
|
|
|
||||||||||||||
|
|
|
|
A(x) |
|
|
|
|
|
m |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
|
инерционных |
|
|
|
|||||||
a |
|
|
|
m(x,t) |
|
|
|
|
|
|
|
(x,t) |
моментов |
Mt (x, t) |
|
||||||||||||
m |
|
|
|
Mt (x,t) |
|
in |
|
|
|
|
Mt (x, t) |
dx |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
x |
|||||||||||||||
|
|
|
|
aM |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
M0 (t) |
|
min(x,t) |
|
|
|
|
M |
|
|
|
|
|
|
|
|
dx |
|
|
m(x,t) |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
(t) |
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
dx m(x,t) |
|
|
|
|
Частные случаи: |
|
|
|
|
||||||||||||||||
|
|
|
|
1. Дифференциальное уравнение |
|
|
|||||||||||||||||||||
Решение уравнения: |
|
|
вынужденного движения при кручении |
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
остоянного |
|
|
|||||
(x,t) (x,t) |
(x,t) прямолинейного стержня переменногосечения |
||||||||||||||||||||||||||
|
|
|
|
|
|
сснеравномернораспределённноймасссой, |
|
||||||||||||||||||||
(x,t) j(x) sin( ωj t ф0 j ) |
|
|
|||||||||||||||||||||||||
без учёта демпфирования (сопротивления) |
|||||||||||||||||||||||||||
j 1 |
|
|
|
|
|||||||||||||||||||||||
полигармоническая |
Волно |
|
|
|
|
2 (x,(tx,) t) I p |
2 (x,t2) (x,tm) (x,t) |
|
|||||||||||||||||||
собственная |
|
|
вое |
|
(x) |
|
|
|
|
I |
(x) |
|
|
m(x,t) |
|||||||||||||
|
|
|
|
|
|
GI |
|
|
|
|
|
||||||||||||||||
составляющая |
|
уравнениеx |
t |
|
2 |
x |
GI |
|
|
p |
|
|
2 |
GI |
|
|
|||||||||||
|
|
x |
|
t |
|
|
t |
t |
2 |
t |
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||

|
|
|
Динамическое кручение |
|
|
|
|
|
|
|
||||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||||||||
|
|
x |
(x,t) |
– угол закручивания |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
M(t) |
|
~ |
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
A(x) |
|
|
m (x) ρ(x) A(x) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
интенсивность |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
m |
инерционных |
|
|
|
|
|
|
|
||||
a |
|
|
m(x,t) |
|
(x,t) |
моментов |
|
|
Mt (x, t) |
|
||||||||||
m |
|
Mt (x,t) |
in |
|
Mt (x, t) |
|
dx |
|||||||||||||
|
|
|
|
x |
|
|
||||||||||||||
|
|
|
aM |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M0 (t) |
|
min(x,t) |
|
|
|
M |
|
|
dx |
|
m(x,t) |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
(t) |
|
x |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
dx m(x,t) |
|
Частные случаи: |
|
|
|
|
|
|
|
||||||||||
|
|
|
2.1 Дифференциальное уравнение |
|
|
|
|
|||||||||||||
Решение уравнения: |
|
|
гармоническихвынужденного движениякрутильныхприколебанийкручении |
|
|
|||||||||||||||
(x,t) (x,t) (x,t) |
прямолинейного стержня постоянного сечения |
|||||||||||||||||||
|
|
|
|
|
|
с равномерно распределённой массой, |
|
|
||||||||||||
(x,t) j(x) sin( ωj t ф0 j ) |
|
|
|
|||||||||||||||||
без учёта демпфирования (сопротивления) |
||||||||||||||||||||
j 1 |
|
|
|
|
||||||||||||||||
полигармоническая |
Волновое |
22 |
|
I |
2 |
(x,mt)(x) |
|
|
|
I |
p |
ω2 |
||||||||
собственная |
|
|
d ((x,)t) |
2 |
p |
|
m(x,t) |
|
F |
|||||||||||
|
|
|
|
|
|
|
k |
(x) |
|
|
, |
k |
|
|
|
|
||||
составляющая |
|
уравнение |
dxx22 |
|
GIt |
t2 |
GIt |
|
|
GIt |
|
GIt |
||||||||

|
|
|
|
|
|
|
|
|
|
|
|
Динамическое кручение |
|
|
|
|
|
|||||||||||
прямолинейного стержня с распределённой массой |
||||||||||||||||||||||||||||
0(t) |
|
|
|
|
x |
|
|
(x,t) – угол закручивания |
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
A(x) |
M(t) |
|
~ |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m (x) ρ(x) A(x) |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
интенсивность |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
инерционных |
|
|
|
|
|
|||
|
|
|
|
|
|
a |
|
|
|
|
|
m(x,t) |
|
|
(x,t) |
моментов |
|
Mt (x, t) |
|
|||||||||
|
|
|
|
|
|
m |
|
|
|
|
Mt (x,t) |
|
in |
|
Mt (x, t) |
|
dx |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
aM |
|
|
|
|
|
|
|
|
|
|
||||||
|
M0 (t) |
|
|
min(x,t) |
|
|
|
M |
|
|
|
|
dx |
m(x,t) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(t) |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
dx m |
(x,t) |
|
|
Частные случаи: |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
23. Дифференциальное уравнение |
|
|
|
|||||||||||||
Решение уравнения: |
|
|
гармоническихсобственных крутильныхколебаний |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
прямолинейного стержня постоянного сечения |
||||||||||||||
(x,t) (x, ) |
(x,t) |
|||||||||||||||||||||||||||
При m(x) |
|
= const |
= m |
|
|
с равномерно распределённой массой, |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
M0 |
|
|
|
|
|
|
|||||||||||
(x) |
|
|
|
|
cos kxcoskx sin kx |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
(x) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
kGIt |
|
|
|
|
без учёта демпфирования (сопротивления) |
||||||||||||||
|
|
0 |
M |
|
|
0 |
|
|
|
|
|
|||||||||||||||||
|
M |
0 |
|
|
sin k(x |
aM ) |
|
|
|
2 |
2 |
|
|
|
|
|
|
|
|
2 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I ω |
||||||||||||
|
sin kx |
|
|
M |
sin k (x a ) |
|
|
2 |
|
|
m(x) |
|
|
|||||||||||||||
|
|
|
|
|
kGI |
t |
|
|
kGIt |
|
|
|
dM (x) |
|
|
2 |
|
|
|
p |
F |
|||||||
|
kGItm |
|
|
|
|
|
|
d |
(x) |
|
k |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
dx2 |
|
k |
|
(kx) (x) 0 , |
GIt |
|||||||||||||||
|
k2GIt |
|
1 |
cos k(x |
am) |
|
|
dx2 |
|
|
|
GIt |
|
|
||||||||||||||