

1.4. Установка прибора в рабочее положение, измерение горизонтальных и вертикальных углов
Перед измерением горизонтального угла теодолит устанавливается в рабочее положение.
Установка теодолита в рабочее положение складывается из следующих действий:
а) центрирования теодолита, заключающегося в установке центра лимба над вершиной измеряемого угла с помощью отвеса;
22
счет записывают в журнал. Затем вычисляют место нуля (МО) вертикального круга.
Местом нуля (МО) называется отсчет по вертикальному кругу, когда визирная ось зрительной трубы горизонтальна, а пузырек уровня находится в нуль-пункте. Место нуля (МО) и угол наклона вычисляются по следующим формулам:
MO = (KЛ + КП)/ 2 υ = КЛ – МО υ = МО – КП
Показателем правильности измерения углов наклона служит постоянство МО, колебание которого не должно превышать двойной точности отсчета по шкале прибора, т.е.1ٰ.
Рис.
1.6. Схема
измерения угла наклона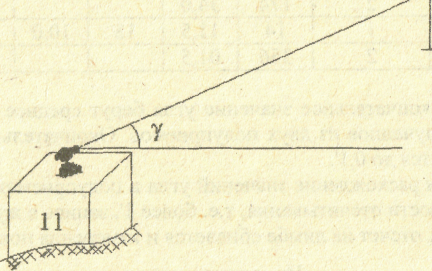
Из результатов обработки основного хода выбирают исходные дирекционные углы (а4-5 = 205°42,4'; а2-3 = 72°36,8'),которые записывают в графу 4 ведомости, и исходные координаты точек примыкания диагонального хода (Х5 = +494,77 м; Y5 = +783,29 м; Х2 = +829,60 м; Y2 = +562,04 м), которые переписы-вают в графы 11 и 12 ведомости.
Вычисляют сумму измеренных углов и теоретическую сумму углов. Теоретическая сумма углов в разомкнутом ходе вычисляется по формуле:
∑βтеор = (ан - ак) + 180۫ *n
где ан и ак - исходные дирекционные углы. В примере ∑βИЗм = 493004,4'; ан = 205°42,4'; ак = 72°36,8';
∑βтеоР = (205°42,4'-72°36,8') + 180° • 4 = 493°05,6' . 2.2.4. Угловую невязку получают по формуле:
fβ = ∑βИЗм - ∑βтеоР
В нашем случае fβ = 493°04,4'-493°05,6' = -1,2' .
2.2.5. Определяют допустимость угловой невязки по формуле:
fβдоп = 1ٰ * √
nТаблица 1.2
Журнал измерения углов наклона
|
Номера точек на-блюдения |
Отсчеты по вертикальному кругу |
МО |
Угол наклона | ||||||||||
|
КП |
КЛ | ||||||||||||
|
о |
ٰ |
о |
ٰ |
о |
ٰ |
о |
ٰ | ||||||
|
Станция |
№11 | ||||||||||||
|
1 2 |
-6 +1 |
26 15 |
+6 -1 |
28 15 |
+0 0 |
01 00 |
+6 -1 |
27 15 | |||||
В примере fβдоп = 1ٰ * √n = 2,0ٰ, т.е. fβ < fβдоп
Вычисляют поправки в измеренные углы и исправляют углы так же, как в основном ходе, и с такими же контрольными вычислениями.
Вычисляют дирекционные углы сторон хода. За исходный принимается а4-5. Вычисление дирекционных углов контролируется тем, что в конце вычислений должен получиться дирекционный угол конечной стороны, равный заданному (а2-3)
Вычисляют румбы линий хода, приращения координат и невязки в приращениях координат. Невязки вычисляют по формулам:
10
19
fx = ∑Δ xп - ∑Δxт ,
fy = ∑Δ yп - ∑Δyп
где ∑∆хп, ∑∆yп - практические суммы приращений координат; ∑∆хт, ∑∆yт - теоретические суммы приращений координат.
Теоретические суммы приращений координат вычисляются по формулам:
∑∆хт =(Хк-Хн),
∑∆yт =(ук-ун),
где Хн,Ун - координаты начальной точки диагонального хода (в примере Х5, У5); Хк, Ук - координаты конечной точки диагонального хода (в примере Х2, У2).
В приведенном примере:
∑∆хп =- 334,96м; ∑∆yп =-221,00м;
∑∆хт =-334,83м; ∑∆yт = + 221,25 м;
Fх = + 0,13м; Fу =+0,25 м.
Абсолютная невязка FL = 0,28 м.
Относительная невязка диагонального хода должна удовле-
творять условию:
Fl/L = 1/1500
В примере fl/L = 0.28 м / 444.86 м = 1/1600 < 1/5000
Распределение невязок и вычисление исправленныхприращений координат производится так же, как в основном хо-де, с соблюдением соответствующих контролем. Используя ис-ходные координаты точек диагонального хода и исправленныеприращения координат, вычисляют последовательно координатывершин диагонального хода.
Контролируют вычисление координат следующимобразом: в конце вычислений координат вершин диагональногохода должны получить исходные координаты конечной точкидиагонального хода.