

1.2.3. Изменяемые системы
Ограничимся в дальнейшем рассмотрением систем, у которых условная степень свободы W* = 0.
Мы выяснили, что такие системы, могут быть как изменяемыми, так и неизменяемыми, причем в последнем случае они будут статически определимыми. Для таких систем справедливо следующее
Определение 1.4. Изменяемыми называются системы, которые получаются из неизменяемых систем при определенных критических значениях параметров.
Например, НС на рис. 1.10, а при = 0 переходит в ИС на рис. 1.10, б. Это сопровождается превращением статически определимой системы (СОС) в СНС, поскольку число линейно-независимых уравнений для определения опорных реакций уменьшается на единицу. При этом ранг матрицы этих уравнений становится равным двум, а ее определитель равным нулю:
det A = 0. (1.6)
Изменяемые системы (W > 0, W* = 0) подразделяются на:
– геометрически изменяемые системы (ГИС);
– мгновенно изменяемые системы (МИС).

Рис.1.10
Мгновенно изменяемые отличаются от ГИС тем, что допускают не конечные – как рама на рис. 1.10, б, – а только бесконечно малые перемещения. При этом значения параметров, о которых идет речь в определении 1.4, у ГИС остаются постоянными, а у МИС – изменяются при перемещении.
Кроме того, переход неподвижных статически определимых систем в МИС может сопровождаться появлением бесконечно больших опорных реакций.
Рассмотрим, например, НС на рис. 1.11, а. Для определения опорной реакции RB составим уравнение равновесия: МА = 0, откуда найдем: RB = Pa/. Эта рама переходит в МИС на рис. 1.11, б при критическом значении параметра = 0. Нетрудно видеть, что предел RB при 0 равен бесконечности.
Это может привести к разрушению реальной конструкции, поэтому такие МИС не применяют в строительстве.
Термин «мгновенно изменяемая система», подчеркивает, что под действием приложенной нагрузки реальная деформируемая система может занять новую конфигурацию, для которой значение параметра станет отличным от критического. При этом в рассматриваемом примере (рис. 1.11, б) точка В сместится вниз и реакция RB примет конечное значение.

Рис.1.11
Итак, мы выяснили, что принадлежность системы к классу МИС крайне нежелательна. Поэтому перечислим некоторые признаки МИС:
1) Два диска, соединенные шарниром, связаны с остальной частью системы или с землей при помощи двух других шарниров, лежащих на одной прямой с первым (рис. 1.12).
2) Диск, прикреплен к системе или к земле при помощи трех линейных связей, у которых линии действия реакций параллельны (рис. 1.13) или пересекаются в одной точке (рис. 1.14).
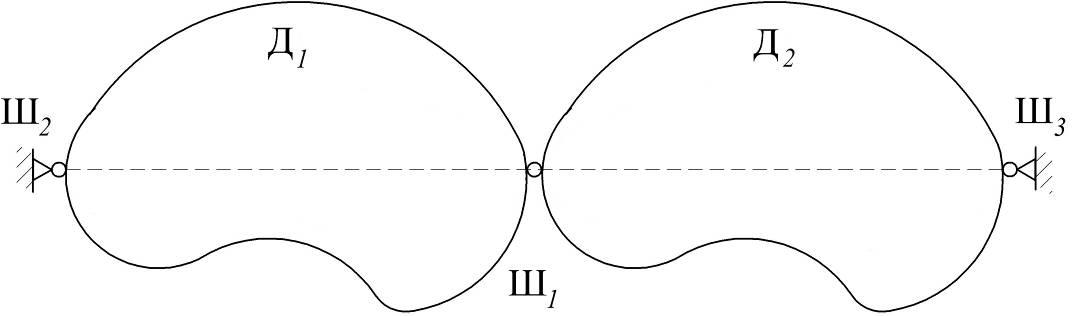
Рис.1.12
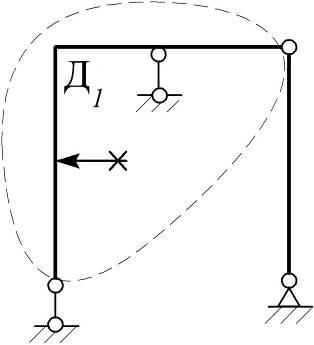
Рис.1.13

Рис.1.14
Примечания:
1. МИС на рис. 1.11, б соответствует первому из приведенных признаков, роль второго диска выполняет подвижная опора В. Диск Д1 на рис. 1.14 выполняет роль третьей линейной связи по отношению к диску Д2.
2. Приведенные признаки МИС не являются исчерпывающими, то есть если исследуемая модель не отвечает им, то это не означает, что она не будет принадлежать к этому классу. Самым общим является аналитический метод исследования систем, основанный на рассмотрении уравнений равновесия для определения их опорных реакций.
3. Поскольку кинематический анализ связан с рассмотрением системы абсолютно твердых тел, он мог бы изучаться в курсе теоретической, а не как традиционно – строительной механики. Кстати, в 5 на стр. 26-28 можно найти несколько МИС, ошибочно включенных в задание, где требуется определить опорные реакции составной конструкции.