

Aliev1-6 / Алиев А.А №1 ☺☺☺ / Вариант №1
.docxМинистерство образования и науки Российской Федерации

Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
Национальный минерально-сырьевой университет «Горный»
Кафедра АТПП
Отчет по лабораторной работе № 1
Тема: Инженерные способы настройки ПИД-регуляторов.
Вариант 1
Выполнил: студент гр. АПМ-11-2 /Алиев А.А./
Проверил: /Котелева Н. И./
Санкт-Петербург
2014
Цель работы: Определение типовых оптимальных процессов регулирование. Настройка ПИД-регулятора для обеспечения требуемого управления.
Этапы проведения работы:
-
Выбор оптимального типа регулятора
-
Расчет коэффициентов регулятора
-
Оценка качества работы регулятора на модели объекта управления.
-
Настройка регулятора на реальном технологическом объекте.
Выполнение работы
В соответствии с вариантом задания в Matlab построим модель для изучения динамического звена:

Рис 1. Модель динамического звена
Зададим параметры передаточной функции в соответствии с вариантом

Рис. 2 График переходного процесса динамического звена.
Определим значения по кривой разгона (рис. 2)
Определим оптимальные настройки ПИД-регулятора для каждого процесса регулирования
Н0.63=0,63*10=6,3 => T0.63=5,2686
Н0.28=0,28*10=2,8 => T0.28=2,917
Tоб=1,5*(5,2686-2,917)=3,5274
 об=5,2686-2,917=2,3516
об=5,2686-2,917=2,3516
Апериодический с минимальным временем регулирования




Соберем
схему для управления по возмущению,
вместе с кривой разгона и с ПИД-регулятором
настроенным автоматически

Рис. 3 Схема управления по возмущению
PID Controller1:

PID Controller1 (Автоматическая настройка)
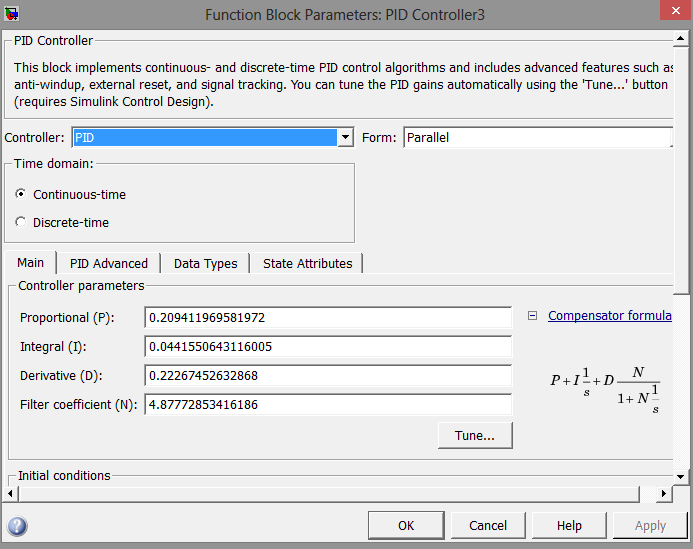
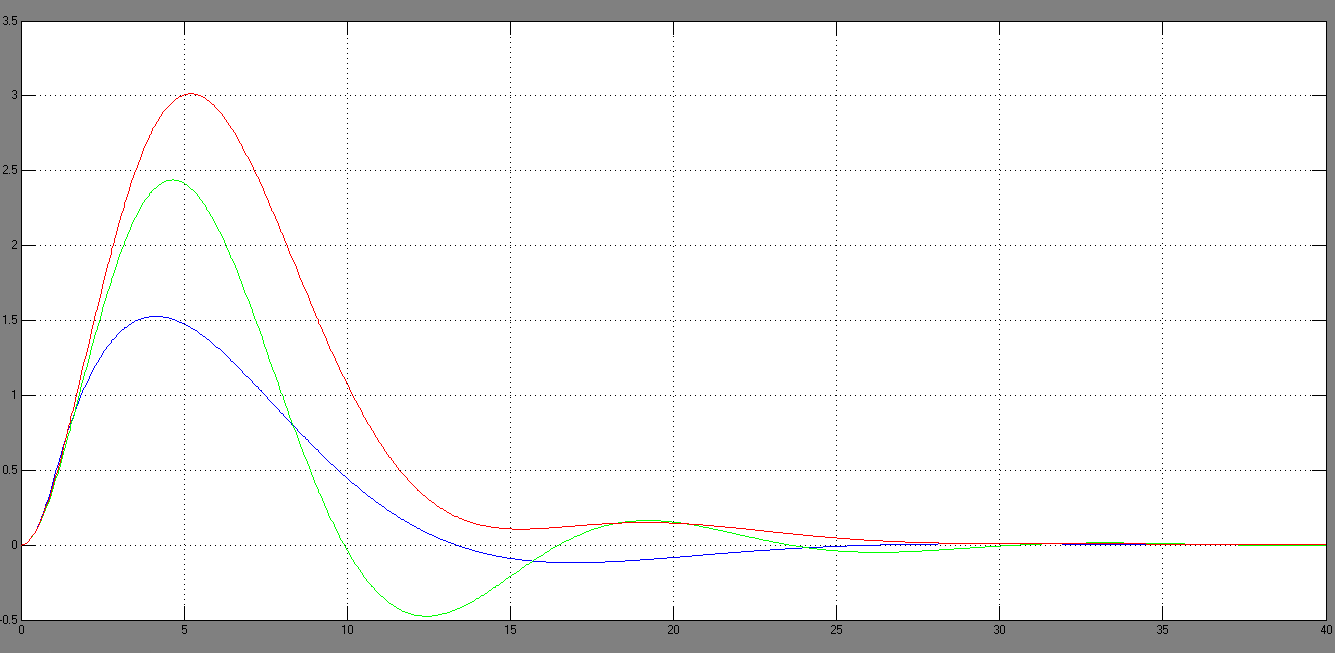
Рис. 4 Управление по возмущению
Красный график – это кривая полученная с использованием ПИД – регулятора, настроенного автоматически, Зеленая – кривая – настроенного в ручную. По графику можно определить, что при настройке автоматически почти не наблюдаются колебания и система приходит в состояние равновесия чуть быстрее, нежели при настройке вручную.
Синий график - реакция на единичное ступенчатое воздействие. Кривая получена с использованием Discrete Impulse.
Соберем схему для управления по заданию, вместе с кривой разгона и с ПИД-регулятором настроенным автоматически

Рис. 5 Схема управления по заданию
PID Controller:

PID Controller1 (Автоматическая настройка)

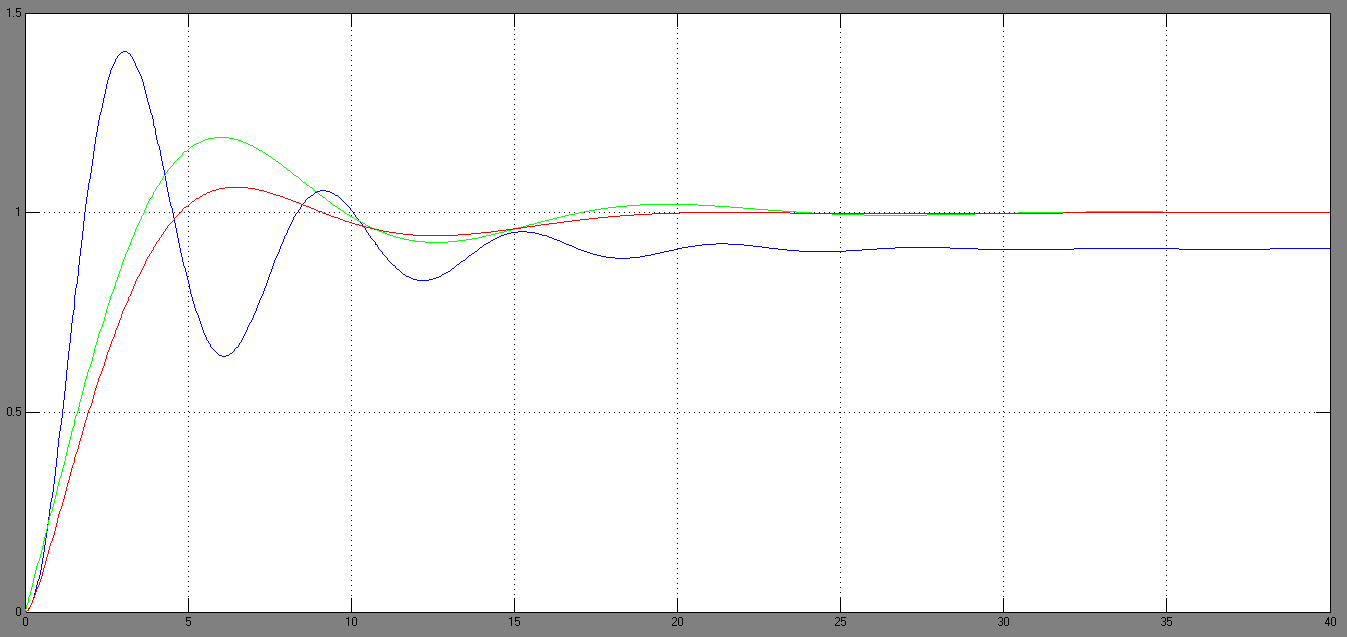
Рис. 6 Управление по заданию
Красный график – это результат автоматической настройки ПИД – регулятора, зеленый – ручная настройка. По графику видно, что при автоматической настройке амплитуда колебаний меньше, чем при ручной. Однако можно заметить, что в состояние равновесия обе кривых приходят почти в одно время.
Синий график - это результат подключения звена по принципу обратной связи, величина уставки равна 0,91.
Вывод: в результате выполнения лабораторной работы была произведена настройка ПИД – регулятора по возмущению и по заданию. Также были сравнены ручная настройка ПИД – регулятора и автоматическая. При автоматической настройке почти не наблюдаются колебания и система приходит в равновесие чуть быстрее.
Принцип управления по возмущению заключается в том, что для уменьшения или устранения отклонения управляемой величины от заданного значения, которое вызывается возмущением, измеряется это возмущение и превращается в управляющее действие, которое компенсирует это отклонение.