

Первичные преобразователи. Сокращенный курс
.pdf3.Объясните как работает термистор. Каким уравнением описывается характеристика термистора в случае, когда известно его сопротивление при некоторой температуре?
4.Приведите уравнение Шокли. Какой параметр является информативном при измерении температуры с помощью полупроводникового диода?
5.В чем заключается физическая сущность термоэлектрического эффекта (эффекта Зеебека)? Объясните работу термопары. Какие материалы используются при изготовлении термопар? Приведите зависимости напряжения от разности температур.
6.Какие принципы положены в основу радиационного метода измерения температур? Объясните закон СтефанаБольцмана.
7.Опишите принцип работы радиационного пирометра, диапазон измеряемых температур, преимущества перед другими типами термопреобразователей, особенности конструкций.
ГЛАВА 7.
ПРОВОЛОЧНЫЕ И РЕОСТАТНЫЕ ПЕРВИЧНЫЕ ПРЕОБРАЗОВАТЕЛИ
7.1. Проволочные датчики
Действие проволочных датчиков основано на изменении электрического сопротивления проводников при упругих деформациях растяжения и сжатия [7].
Когда проволока подвергается деформации растяжения, то ее длина увеличивается, а поперечное сечение уменьшается, что вызывает увеличение сопротивления; при сжатии уменьшение длины и увеличение поперечного сечения вызывают уменьшение ее сопротивления.
Основной характеристикой проволочных материалов является относительная чувствительность датчика S, представляющая отно-
шение относительного изменения сопротивления |
R к относи- |
|
R |
тельной деформации l , т. е. |
|
l |
|
|
120 |
R
S = |
|
R |
= S |
1 |
+ S |
2 |
, |
(7.1.1) |
|
|
|
||||||||
|
|
l |
|
|
|
|
|||
|
|
|
|
|
|
|
|||
l
где R и l — сопротивление и длина чувствительного элемента датчика; S1 — величина, характеризующая изменение геометрических размеров проволоки; S2— величина, характеризующая изменение электрических свойств материала при деформациях.
В свою очередь, значения
|
|
ρc |
|
|
S1 = 1 + 2μ ; |
S2 = |
ρc |
, |
|
l |
||||
|
|
|
l
где µ — коэффициент Пуассона, который для металлов равен 0,2—0,4; ρc — удельное сопротивление.
Для большинства металлов величина S колеблется в пределах
1,48—1,8.
Чувствительные элементы датчиков преимущественно изготовляют из металлической проволоки.
Применяются также проволочные датчики с решетками из фольги. Они представляют собой весьма тонкую ленту из фольги, в которой часть металла выбрана травлением таким образом, что оставшаяся его часть образует показанную ниже на (рис. 7.1.2, б) решетку с выводами. Перед травлением на фольгу наносят светочувствительную эмульсию, затем на эмульсию контактным способом (с негатива) наносят отпечаток решетки, проявляют, окрашивают и дубят (делают стойким к травильной кислоте). Затем на обратную сторону фольги наносят слой лака и полимеризуют его. После этого фольгу травят, получая таким путем решетку из фольги, прикрепленную к пленке лака.
В качестве материала для проволочных датчиков используют-
ся: константан (60% Cu + 40% Ni); нихром (80% Ni + 20% Cr); желе-
зохромалюминиевый сплав № 2 (22,3% Cr + 4,8% Al + 0,035% Со + F — остальное); манганин (84% Cu + 12% Mn + 4% Ni); хромель
(65% Ni + 25% Fe + 10% Cr); платиноиридиевый сплав (95% Pt + 5% Ir) и др.
121
По своей конструкции проволочные датчики делятся на две группы: ненаклеиваемые и наклеиваемые [2].
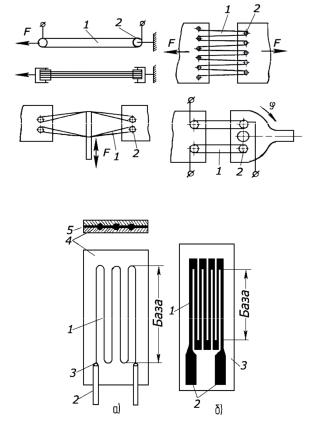
На (рис.7.1.1) приведены примеры устройства некоторых типов ненаклеиваемых датчиков, а на (рис.7.1.2) и (7.1.3) — наклеиваемых датчиков. Для изготовления этих датчиков применяется круглая проволока диаметром 0,015—0,06 мм. Бумага, употребляемая для основания и изоляции датчика, имеет толщину 0,02—0,05 мм.
Рис 7.1.1. Различные схемы ненаклеиваемых датчиков:
1 - проволока; 2 - изолятор; F - деформирующая сила
Рис. 8.1.2. Конструктивные схемы наклеиваемых датчиков с петлевым расположением витков: а- проволочный датчик; 1 - проволока;
2 - выводы; 3 - пайка или сварка; 4- бумага или лаковая пленка; 5 - клей; б - фольговый датчик; 1 - фольга; 2 - выводы; 3- бумага
122
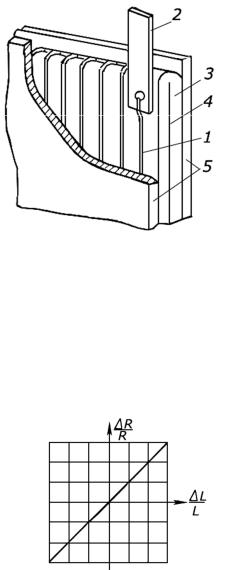
Рис. 7.1.3. Конструктивная схема наклеиваемого датчика с навитой проволокой: 1 - проволока; 2 - выводы; 3 - каркас из бумаги; 4 - склейка из каркаса;
5 - бумага
К проволочным датчикам предъявляются следующие требования: они должны иметь наибольшую относительную чувствительность, наименьший температурный коэффициент сопротивления, наибольшее удельное сопротивление, наибольшую механическую прочность и, наконец, наименьшую термоЭДС проволоки в паре с медью, так как выводы, припаиваемые к проволоке датчика, делаются из меди.
Рис.7.1.4. Характеристика проволочных датчиков для измерения
сложных деформаций
123
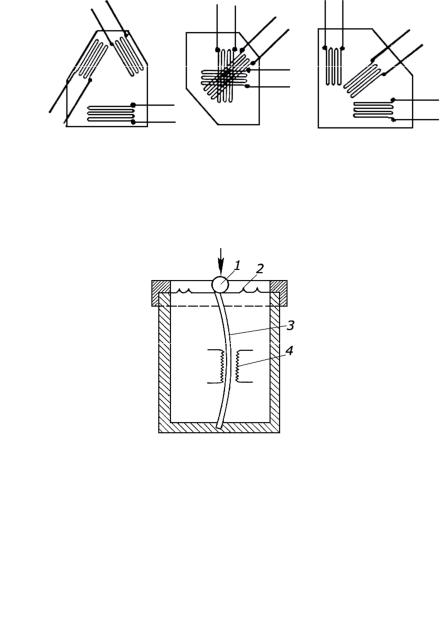
Рис.7.1.5. Примеры расположения проволочного датчика
В пределах упругой деформации чувствительность проволочных датчиков практически не зависит ни от величины деформации, ни от ее направления (растяжения или сжатия), и поэтому характеристика проволочного датчика линейная (рис.7.1.4).
Рис. 7.1.6. Проволочный датчик линейных микроперемещений
Для измерения вибраций, возникающих в различных направлениях, применяют так называемые датчики-розетки, состоящие из трех проволочных датчиков (рис.7.1.5).
Учитывая, что датчики должны безотказно следовать за быстрыми изменениями деформации, вплоть до многих тысяч колебаний в секунду, они должны быть тщательно протарированы. Проволочные датчики сопротивления позволяют изучить колебания и динамические напряжения таких элементов машин и конструкций, которые для других способов измерений недоступны. Для измерения
124
вибрации, ускорений применяется много различных приборов, основанных на проволочных датчиках. Так, на (рис.7.1.6) изображен проволочный датчик линейных микроперемещений, применяемый для исследования динамических режимов работы механизмов и ма-
шин [8].
Продольный изгиб небольшой плоской пружины 3 из бериллиевой бронзы при воздействии перемещения на упругую мембрану 2 датчика является мерой перемещения. Последнее регистрируется проволочными датчиками 4, включенными в мостовую схему. Шарик 1 воспринимает измеряемое перемещение. Такая конструкция датчика может давать на осциллограмме, при соответствующих усилителе и вибраторе, увеличение перемещения конца пружины в 2000 раз.
Плоская пружина 3 имеет размеры |
0,35×10×50 мм. Проволока |
датчика 4 изготовлена из константана Ø30 |
мк. |
7.2. Реостатные проволочные преобразователи
Входной величиной реостатного преобразователя является линейное или угловое перемещение движка, а выходной — меняющееся сопротивление.
Для преобразования измеряемой механической величины в перемещение движка реостатного преобразователя используют различные преобразователи механического сигнала. Например, при измерении давления могут быть использованы такие механические упругие преобразователи, как мембраны, сильфоны, трубки Бурдона, спиральные и винтовые трубки с внутренним давлением и др. Широко применяют различного рода вспомогательные элементы, например рычаги, редукторы для измерения масштабов перемещений. Основное внимание в настоящей главе будет уделено реостатным преобразователям, или, как их часто называют, измерительным потенциометрам [2].
Преимуществом реостатных датчиков является возможность получения достаточно большого выходного сигнала, причем реостатный преобразователь датчика может питаться как постоянным, так и переменным током. Реактивное сопротивление реостатного преобразователя весьма мало (малы собственные индуктивности и емкости) в диапазоне частот, верхняя граница которого составляет несколько килогерц.
125
Большая величина выходного сигнала часто позволяет проводить дальнейшую его обработку и регистрацию без применения дополнительных усилительных устройств, снижающих точность результатов измерений.
Динамические свойства потенциометрических датчиков невысоки, поэтому их применяют для измерения статических или медленно меняющихся величин. Ограничение скорости изменения измеряемой величины вызвано наличием механических связей и значительных присоединенных масс в кинематических цепях датчиков, что создает большую инерционность и снижает (при сравнительно небольшой жесткости) собственную частоту датчика до 2—10 Гц. Другим важным фактором, снижающим динамические свойства реостатных датчиков, является необходимость обеспечения устойчивого контакта между движком и обмоткой реостатного преобразователя. При больших скоростях перемещения движка возможна потеря контакта. Это явление особенно свойственно проволочным реостатным преобразователям, контактная дорожка у которых представляет собой волнообразную поверхность. Наличие механических вибраций при работе датчика увеличивает вероятность нарушения контакта. В этом случае имеет место явление «подскока» движка, особенно на резонансных частотах.
Стремление к обеспечению устойчивого контакта приводит к необходимости увеличения поджимающего усилия, что, в свою очередь, ухудшает динамические свойства. Это связано с увеличением усилия, необходимого для перемещения движка, что накладывает ограничения на интенсивность воздействия измеряемой величины. Искажение датчиком исследуемого или контролируемого процесса должно быть минимальным, в рамках допустимых погрешностей. Отсюда вытекает требование снижения усилия, прилагаемого ко входным элементам датчика. При проектировании необходимо принимать компромиссное решение, исходя из минимальной суммарной погрешности, вызываемой искажением исследуемого процесса и возможной кратковременной потерей контакта.
В настоящее время промышленность выпускает большое число прецизионных малогабаритных реостатных преобразователей (потенциометров) как однооборотных, так и многооборотных. Поэтому при проектировании реостатных датчиков открыты широкие возможности выбора унифицированного преобразователя. В тех
126
случаях, когда по тем или иным соображениям промышленный преобразователь использовать нельзя, необходимо его спроектировать. Поэтому остановимся несколько подробнее на вопросах проектирования реостатных преобразователей.
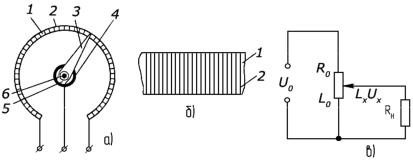
Реостатный преобразователь (рис.7.2.1, а) состоит из каркаса 1, на который намотана изолированная проволока 2. По верхней грани каркаса, часть боковой поверхности которого показана на (рис.7.2.1, б,) скользит щетка 3 движка реостата. Изоляция проволоки для обеспечения электрического контакта зачищена. Напряжение питания преобразователя подают к двум крайним зажимам, выходную величину снимают между одним из крайних зажимов и средним зажимом, соединенным с токосъемным кольцом 4, по которому скользит щетка 5. Приводной валик 6 электрически изолирован от остальных элементов движка.
Рис.7.2.1. Реостатный преобразователь
а - схема устройства; б - каркас; в - схема электрической цепи
Электрическая схема преобразователя показана на (рис.7.2.1, в.) Функция преобразования реостатного преобразователя Ux = f (lx) определяется соотношением:
U x = |
|
U 0 lx / l0 |
|
, |
(7.2.1) |
|
+ (R0 / RH )(lx / l0 )[1 − (lx / l0 )] |
||||
1 |
|
|
|||
где Ux — |
выходное напряжение; lx — входное перемещение; l0 |
||||
— общая длина обмотки преобразователя; R0 — общее сопротивле- |
|||||
ние преобразователя; RH — сопротивление нагрузки; U0 — |
напряже- |
||||
|
|
|
|
|
127 |

ние питания. Для случая углового перемещения lx=rφx, где r — ра-
диус каркаса преобразователя; φx— входное угловое перемещение.
Расчет реостатных преобразователей. Длину витка реостат-
ного преобразователя приближенно можно определить по формуле:
lB ≈ 2(H + b) , |
(7.2.2) |
где Н — высота каркаса; b— его толщина.
В тех случаях, когда каркас профилированный (случай функционального реостатного преобразователя), витки располагают не перпендикулярно прямолинейной кромке каркаса, а под углом а,
равным текущему углу подъема каркаса. Тогда |
|
lB ≈ 2(Hα + b) / cosα , |
(7.2.3) |
где Нα — текущая высота каркаса.
Для линейного преобразователя а = 0 и выражения (7.2.3) переходят в (7.2.2).
Длину витка можно также определить, исходя из общего сопротивления преобразователя R0, диаметра d и удельного сопротивления ρ применяемого провода и числа витков n:
lB = |
R |
d 2 |
|
|
|
|
|||||
0 |
|
|
|
|
. |
|
|
|
(7.2.4) |
||
|
|
|
|
|
|
|
|
|
|||
|
|
nρ 4 |
|
|
|
|
|||||
Приравнивая (7.2.2) и (7.2.4), найдем высоту каркаса |
|
||||||||||
H = |
πR |
0 |
d 2 |
− b . |
(7.2.5) |
||||||
|
8nρ |
||||||||||
|
|
|
|
|
|
||||||
Диаметр провода определяем, исходя из допустимой плотно- |
|||||||||||
сти тока по формуле: |
|
|
|
|
|
|
|
|
|
|
|
d = 0,364 |
|
, |
|
|
|||||||
P / R |
|
||||||||||
|
|
|
|
|
|
|
|
0 |
|
|
|
где Р — мощность рассеивания, Вт. |
|
|
|
|
|||||||
Из (7.2.5) общее сопротивление преобразователя |
|
||||||||||
R0 = |
|
8(H + b)nρ |
. |
|
|||||||
|
|
|
|||||||||
|
|
|
|
|
πd 2 |
|
|||||
(7.2.6)
При расчете задаются рядом величин в формулах (7.2.5) и (7.2.6) и через них определяют другие.
128
Если параметры нагрузки заданы, то значение общего сопротивления преобразователя можно определить, исходя из допустимой погрешности линейности, ρ определяется выбором провода.
Вопросы расчета функциональных и многооборотных реостатных преобразователей достаточно подробно изложены в работе. Там же можно найти расчет электрических параметров металлопленочных преобразователей, в которых вместо проволоки используют
тонкие слои высокоомного металла.
Материалы. Для изготовления обмоток реостатных преобразователей применяют большое число различных сплавов. Материал проволоки должен иметь высокое удельное сопротивление, малый температурный коэффициент сопротивления, обладать стабильностью характеристик во времени, высокой коррозионной стойкостью, высококачественной изоляцией, большой прочностью на разрыв. В реостатных преобразователях широко используют обмотки из константана, нихрома, манганина. Однако обмотки из этих материалов применяют в преобразователях невысокой точности. Это объясняется тем, что константан, например, имеет сравнительно невысокую температуру нагрева, нихром — большой температурный коэффициент сопротивления, а манганин быстро окисляется. Поэтому, когда требуется высокая точность и надежность в жестких условиях эксплуатации, применяют проволоку из благородных металлов. Наиболее пригодны сплавы на основе платины, золота, серебра, палладия. Такие сплавы химически нейтральны и не поддаются коррозии даже при высокой температуре.
Вопросы для самоконтроля по главе 7
1.Объясните физические работы проволочных первичных преобразователей. Напишите функцию преобразования и уравнение для определения чувствительности. Приведите конструктивные схемы ненаклеиваемых и наклеиваемых датчиков.
2.Приведите схемы проволочных детчиков линейных и угловых перемещений, проволочного датчика угловых перемещений с упругим валом.
3.Что из себя представляют реостатные датчики? Какие механические упругие элементы могут быть использованы при их конструировании?
129