

Уравновешивающие(хвостовые) канаты
Хвостовые канаты, если они предусмотрены, выбирают из условия полного статического уравновешивания системы:
nx px = np.
20
деляют
Отсюда, задавшись числом хвостовых канатов nx = 2-4, опре-
px = np / nx.
В соответствии с ПБ при МК-подъеме nx ≥ 2.
При шахтном подъеме хвостовые канаты не рассчитывают на
прочность, так как они не несут никакой нагрузки, кроме собствен- ного веса.
Уравновешивающие канаты рекомендуется принимать круглопрядные по ГОСТ 3088-80 и ГОСТ 7668-80; плоские – по ГОСТ 3091-80, ГОСТ 3092-80, а также плоские резинотросовые с маркировочной группой прочностине ниже 1400 МПа.Присистеме ТХК проверяют статический запас прочности головных канатов по уточненному значению р = nx px – np.
Канаты для наклонного подъема
В соответствии с работой [12] расчет наклонного подъема (рис.5) выполняют с учетом сопротивлений движению подъемного сосуда по рельсам (коэффициент сопротивления f1 = 0,01-0,02) и пе- ремещению канатов по поддерживающим роликам (f2 = 0,15-0,30).
Из
уравнения
прочности
находят
массу
1 м
подъемного
ка-
ната
в килограммах: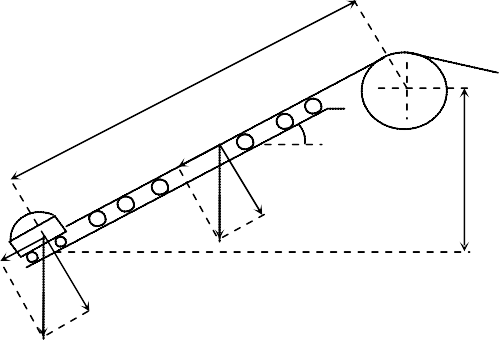
L
nрL sinα
Н
(Q + Q' ) sin α
Q + Q'
nрL
(Q + Q' )cosα
nрL cosα
Рис.5. Схема к расчету канатов наклонных подъемных установок
21
1 (Q Q)(sin α f
1
р
=
n![]()
cosα)
. (15)
св
Р![]()
g kст
L(sin α f2 cosα)
Проверка выбранного каната по прочности производится также, как и для вертикального подъема.
Из формулы (15) можно получить формулу для вертикального подъема. Если = 90, то sin 90= 1, cos 90= 0. Тогда Lsin 90= H – вертикальной высоте подъема.
Расчет и выбор основных параметров механической частиподъемной установки
Подъемную машину и ее привод выбирают с учетом не- скольких условий.
1. Минимальный диаметр органа навивки определяют в за- висимости от диаметра каната d по соотношению
Dmin cd,
где коэффициент с регламентирован ПБ [11] и его значение зависит от типа, назначения и расположения подъемной машины или эле- ментов установки:
|
Одноканатная машина со шкивом трения Многоканатная машина со шкивом трения при наличии отклоняющих |
120 |
|
шкивов |
95 |
|
Направляющие шкивы и барабанные машины на поверхности, а также многоканатные машины при отсутствии отклоняющих шкивов |
79 |
|
Направляющие шкивы, барабанные, подземные, подъемные, а также про- ходческие машины |
60 |
|
Передвижные и откаточные лебедки |
50 |
2. Максимальное статическое натяжение канатов на ок- ружности органа навивки не должно превышать допускаемого по техническим характеристикам подъемной машины Smax Smax шпм.
22
Для МК-подъема (см. рис.4)
Smax = g [Q + Q+ nph+ nx px(H. + hx)].
В других случаях следует руководствоваться аналогичными расчетными схемами.
3. Максимальная статическая разность натяжений канатов на окружности органа навивки не должна превышать допускаемой по техническим характеристикам подъемной машины:
S = Smax – Smin (S)пм,
где Smin – натяжение в порожняковой ветви канатов (см. рис.4),
Smin = g [Q+ np(H. + h) + nx px hx].
Прежде чем приступить к выполнению следующего условия, необходимо по техническим характеристикам наметить тип и размер подъемной машины, удовлетворяющей первым трем условиям.
4. Необходимая ширина барабана, удовлетворяющая тре- буемой канатоемкости органа навивки, не должна превышать стан- дартную ширину В Встанд.
Ширина каждого барабана двухбарабанных подъемных машин
⎛H h ⎞
⎜ зап ⎟
В = ⎜
⎝
πDстанд
zтр 1⎟(d + ),
⎠
где hзап – запасная длина каната, предназначенная для его испыта- ний, обычно hзап 30 м; Dстанд – диаметр стандартного барабана, м; zтр – число витков трения для разгрузки места заделки конца каната на барабане, для деревянной и металлической футеровок барабана, zтр равно соответственно 3 и 5; 1 – виток, состоящий из двух полу- витков, выклинивающихся у реборд и не используемых для навивки канатов; d – диаметр каната, м; – зазор междувитками, для цилин- дрических барабанов = 0,002-0,003 м.
Для вертикальных грузовых шахтных подъемных установок ПБ [11] допускается двухслойная навивка канатов на барабанах.
Ширина неразрезного барабана однобарабанной подъемной машины:
23
при двухконцевом подъеме
⎛H 2h ⎞
⎜ зап ⎟
В = ⎜
⎝
Dстанд
2zтр 12⎟(d + ),
⎠
где 2 – количество витков для образования зазора между навиваю- щейся и свивающейся ветвями канатов;
при одноконцевом подъеме и многослойной навивке
⎛ ⎞
H h
⎜ зап ⎟
В = D⎜
⎝
iπDср
zтр 3⎟(d + ),
⎠
где i – число слоев навивки; iср = 0,5(Dстанд + Di); 3 – число витков для передвижки переходного (критического) участка каната; Di – диаметр i-го слоя навивки, м; Di Dстанд + 2(i + 1)d.
Ширина разрезного барабана однобарабанной машины
В = Вз + Впер + (0,05-0,07),
где Вз – заклиненная часть барабана, м,
⎛H h ⎞
⎜ зап ⎟
Вз = ⎜
⎝
Dстанд
zтр 1⎟(d + );
⎠
Впер – переставная часть барабана, м,
⎛H h ⎞
⎜пер зап ⎟
Впер = ⎜
⎝
Dстанд
zтр 1⎟(d + );
⎠
0,05-0,07 – дополнительная ширина заклиненной части барабана у места разреза, м; Нпер – высота перестановки, Нпер = 100-150 м.
Для подъемных машин со шкивами трения нет необходимо-
сти определять канатоемкость органа навивки иего ширину. Шири- на многоканатного шкива трениязависит от числа и диаметра кана- тов. Обычно расстояние между соседними канатами 200-300 мм.
5. Максимальная скорость подъема должна быть приблизи- тельно равна ориентировочной максимальной скорости (см. раздел 2)
vmax vmaxop .
24
а б в![]()
Д![]()
![]()
![]()
![]()
Д Д Д![]()
![]()
![]()
![]()
![]()
ШТ ШТ ШТ
Р Д
Рис.6. Схемы расположения подъемных машин со шкивами трения: а – без редуктора с одним двигателем; б – без редуктора с двумя двигателями;
в – с редуктором и двумя двигателями; ШТ – шкив трения; Р – редуктор; Д – двигатель
Подбором необходимой частоты вращения двигателя и пере- даточного числа стандартного редуктора подъемной машины доби- ваются соответствия этих скоростей, используя соотношение
vmax = Dдвnном / iред.
Тип редуктора принимают, кроме того, по максимальному крутящему моменту на тихоходном валу
М тв
M maxдв
nJ J
рот ред

Rон
2
i a
,
ред max
где Jрот – момент инерции ротора двигателя, кгм2; n' – число при- водных электродвигателей; Jред – момент инерции редуктора, при- веденный к тихоходному валу, кгм2; Rон – радиус органа навивки, м;
дв
аmax – наибольшее ускорение в период пуска, м/с2;
мальный момент электродвигателя.
M max – макси-
В шахтных подъемных машинах со шкивами трения допус- тимо использование двух электродвигателей. Схемы компоновок приведены на рис.6.
При определении
M max необходимо определить мощность
подъемного электродвигателя. При ориентировочных расчетах мощность подъемного двигателя определяется по формулам:
дв
для двухсосудного подъема
kgQv ; (16)
Nop =
max
1000 ред
25
для однососудного подъема с противовесом (при массе про- тивовеса G = Q + Q / 2, где Q – масса порожнего сосуда)
1 k gQv
![]()
Nop
= 2![]()
max
, (17)
1000 ред
где – коэффициент, учитывающий динамические усилия; k и k– коэффициенты, учитывающие шахтные сопротивления соответст- венно двухсосудной системы и системы сосуд с противовесом; g – ускорение свободного падения, м/с2; ред – КПД редуктора.
Коэффициент учитывает действие дополнительных дина- мических усилий в периоды неустановившегося движения и зависит от характера кривой статических сопротивлений и выбранной про- должительности подъема:
|
Форма кривой |
Нисходящая |
Другие |
|
Время подъема: |
|
|
|
близкое tmin |
1,35-1,45 |
1,15-1,20 |
|
большее tmin в 1,5-2 раза |
1,10-1,15 |
1,00-1,05 |
Чаще всегозначенияпринимают повторой строчке, так как близко (1,5-2,0) tmin.
Минимальная продолжительность подъема tmin [1] отвечает треугольной тахограмме при наибольшей допустимой по технике безопасности максимальной скорости, определяемой по формуле
Тогда
vmax = 0,8 H .
2H 2H![]()
![]()
tmin =
или tmin = 2,5 H .
vmax![]()
![]()
0,8 H
Численные значения коэффициентов k и k в формулах (16),
зависят от типа и системы подъемных сосудов:
Коэффициент k k
Клети 1,20 1,40
Скипы 1,15 1,30
КПД одноступенчатого редуктора в формулах принимают равным 0,95, двухступенчатого – 0,90.
26