

Задание № 3
1. Определить устойчивость системы управления по критериям Гурвица и Найквиста для двух вариантов объекта управления, рассматриваемых в предыдущих заданиях (при больших и меньших 1). Параметры регулятора определять из следующих соотношений:
Ти=2Т0; =1/(1+К0Кр),
где - допустимая статическая ошибка регулирования, которую примем равной 5 %.
2. Построить переходные процессы для двух указанных случаев.
Синтез линейных систем регулирования
В контрольной работе № 3 была рассмотрена система регулирования, состоящая из объекта управления, представляющего собой звено второго порядка и ПИ- регулятора (см. рис. 12.). Рассмотрим методику расчета параметров регулятора для получения наилучшего качества переходного процесса в системе по минимуму средней квадратической интегральной оценки.
Смысл синтеза АСР по минимуму средней квадратической интегральной оценки заключается в подборе настроек регулятора, минимизирующих интеграл
![]() (36)
(36)
где t0 – момент времени включения регулятора, ε(t) – суммарная ошибка регулирования входной величины, включающая в себя ошибки, связанные с изменением заданной величины и колебаниями возмущения.
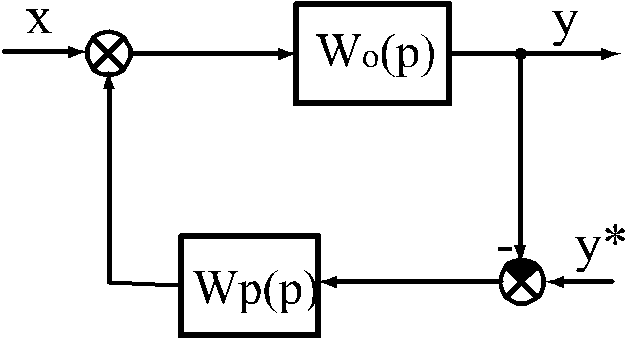
Рис. 12. Схема системы регулирования
Для ошибки регулирования можем записать выражение:
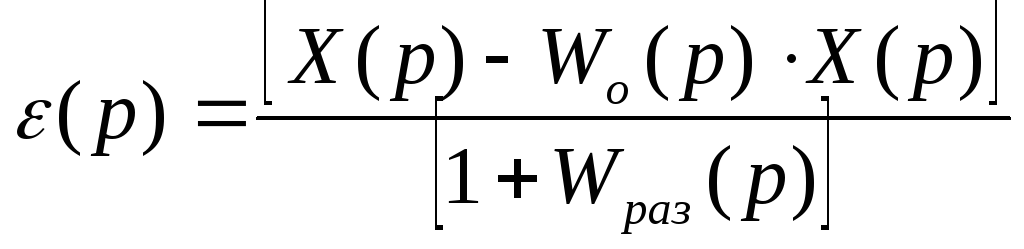 (37)
(37)
Поскольку на входе системы имеем единичный скачек, Х(р)=1/р. Передаточная функция разомкнутой системы:
![]() (38)
(38)
Тогда равенство (37 ) примет вид:
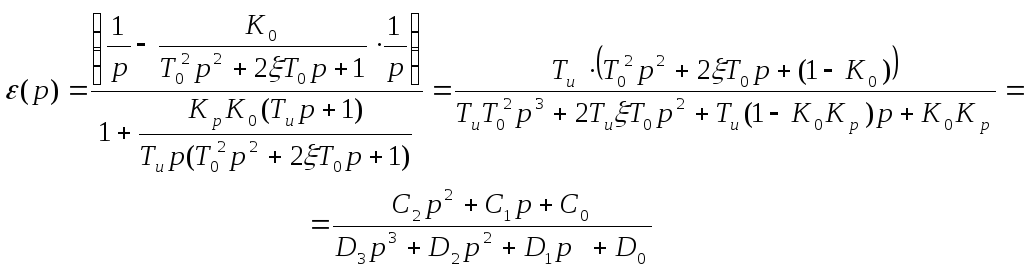
где С2=ТиТо; С1=2ТиТ0ξ; С0=Ти(1 - К0); D3= С2; D2=C1;
D1=Ти(1+КрК0); D0=КрКо.
Последнее выражение получено в области Лапласовых изображений и переход к оригиналу следует произвести через замену р на j, при этом интеграл (36) примет вид:
![]() (39)
(39)
Подобные интегралы табулированы и решение для полинома 3 степени в знаменателе имеет вид:
![]() (40)
(40)
Величину Ти возьмем как и ранее равную 2 То .
Подставив в (40) числовые значения получим
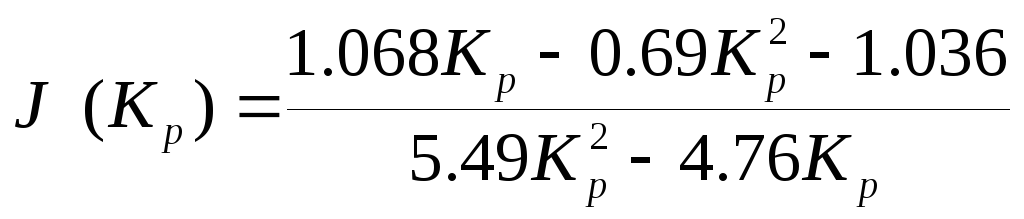 (41)
(41)
Взяв производную по Кр приравняем ее к нулю решаем получившееся уравнение. Получатся 3 корня. Для варианта «пример» это: 2,271020 , 0,49 и 3.88.
При этом значения критерия: 0,12, 0,668 и -0,112.
Критерий не может быть отрицательным поэтому выбираем К= 2,271020.
Из приведенной таблицы видно, что наибольшее совпадение достигается при Кр=0,49; Ти=0,204. Эти настройки и принимаются в качестве оптимальных.
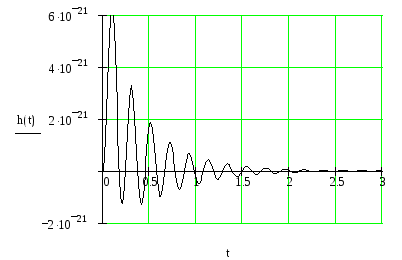
В заключение построим переходной процесс в системе, как реакцию на типовое возмущение – единичный скачек. Определим корни характеристического уравнения замкнутой системы управления и представим решение дифференциального уравнения замкнутой системы в виде:
![]() (42)
(42)
где:
 (43)
(43)
Подставляя корни характеристического уравнения в выражение (43), определяем константы интегрирования Сi и строим по выражению (42) переходной процесс.
Задание к №4
1. Произвести параметрический синтез ПИ-регулятора для своего варианта объекта управления
2. Построить переходной процесс при полученных настройках
3. Сделать выводы о характере переходного процесса
Рекомендательный библиографический список
Основной
1. Лукас В.А. Основы теории автоматического управления. М.: Недра, 1990. 416 с.
2. Нетушила А.В. Теория автоматического управления. М.: Высшая школа, 1976. 400 с.
3. Макаров И.М., Менский Б.М. Линейные автоматические системы. М.: Машиностроение, 1977. 464 с.
4. Копелович А.П. Инженерные методы расчета при выборе автоматических регуляторов. М.: Металлургиздат, 1960. 190 с.
Дополнительный
1. Лукас В.А. Основы теории автоматического управления. М.: Недра, 1977. 376 с.
2. Ротач В.Я. Теория автоматического управления теплоэнергетическими процессами. М.: Энергоиздат, 1985. 292 с.
3. Бесекерский В..А., Попов Е.П. Теория систем автоматического регулирования. М.: Наука, 1975. 767 с.
4. Математические основы теории автоматического регулирования. Учебное пособие в 2-х т. под ред. В.К. Чемоданова. М.: Высшая школа, 1977, т.1 366 с., т.2 455 с.
5.Сборник задач по теории автоматического регулирования и управления, по ред. В.А. Бесекерского. М.: Наука, 1978. 512 с.