

Виноград(Вектор_управ_АД)321стр
.pdf
|
|
|
|
π |
|
|
|
|
U rx |
= |
2 |
sin(ϕи + |
3 ) |
sin(ϕи ) |
U ra |
, |
|
|
|
|
π ) |
|
|
|
||
U ry |
|
3 |
cos(ϕи + |
cos(ϕи ) |
U rb |
|
||
|
|
|
|
3 |
|
|
|
|
где ϕu – угловое положение вектора напряжения относительно фазы А сети.
На рис.15.2 показано разложение вектора тока сети I g на состав-
ляющие в системе координат (x,y), ориентированной по вектору напряжения сети.
 B
B  y
y
Ig
I y |
|
x |
Ix |
|
Ug |
ϕи |
|
|
|
A |
C |
Ia |
Рис.15.2. Разложение вектора тока I g на составляющие в осях x, y
Составляющие U g и ϕи вычисляются на основе измерения на-
пряжения сети. Уравнения выпрямителя в системе координат (x, y) примут вид
L |
|
dI x |
|
= −RI x +U g −Urx +ωи LI y ; |
||
|
|
|||||
|
|
dt |
|
|
|
|
L |
dI y |
|
= −RI y −U ry − ωи LI x ; |
|||
|
|
|||||
|
|
dt |
|
(15.4) |
||
Id = |
|
|
3 |
(Urx I x +Ury I y ) ; |
||
|
|
|
||||
|
|
|
2Ud |
|||
C |
dU d |
= Id − Iн . |
|
dt |
|||
|
|
||
|
|
301 |
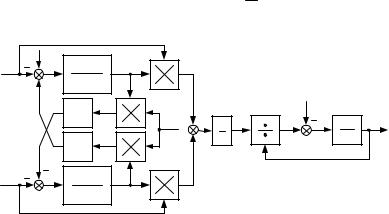
На рис.15.3 изображена структурная схема выпрямителя, постро-
енная по данным уравнениям. Здесь T = RL – постоянная времени входной цепи выпрямителя.
Urx |
U g |
1/ R |
I x |
|
|
|
|
|
|
|
|
|
|||
|
|
Tp +1 |
|
|
|
Iн |
|
|
|
L |
ωи |
|
Id |
Ud |
|
|
|
3 |
1 |
||||
|
|
L |
|
2 |
|
Сp |
|
|
|
|
|
|
|
|
|
Ury |
|
1/ R |
|
|
|
|
|
|
|
Tp +1 |
I y |
|
|
|
|
Рис.15.3. Структурная схема выпрямителя
Функциональная схема системы векторного управления рекуперативным выпрямителем представлена на рис.15.4. Система управления
реализована в синхронной ортогональной системе координат (x, y) , ориентированной по вектору напряжения сети, что позволяет раздельно управлять активной (I x ) и реактивной (I y ) составляющими векто-
ра входного тока выпрямителя I g . U g ,ωu представляют собой ам-
плитуду и угловую частоту напряжения сети.
Регулирование коэффициента мощности преобразователя осуществляется путем формирования определенного соотношения между заданными значениями активной и реактивной составляющих входного
тока (I xz , I yz ) . При I yz = 0 выпрямитель обменивается с сетью толь-
ко активной энергией.
Блок ориентации выполняет вычисление параметров сетевого напряжения U g ,ωu ,ϕu по результатам измерения мгновенных значе-
ний напряжений в фазах сети, а также осуществляет преобразование входных токов в координатную систему (x,y), ориентированную по вектору сетевого напряжения.
Блок компенсации перекрестных связей работает в соответствии с уравнениями
Ukx = |
1 |
ωu LI y ; Ukx = − |
1 |
ωu LI x . |
(15.5) |
Kп |
|
||||
|
|
Kп |
|
||
|
|
|
302 |
|
|


Преобразователь координат выполняет преобразование заданных напряжений выпрямителя из синхронной системы координат (x, y) в
трехфазную систему координат (A, B,C) по уравнениям
U az =U xz cos(ϕu ) −U yz sin(ϕu );
Ubz =U xz cos(ϕu − |
2π |
) −U yz sin(ϕu − |
2π |
); |
(15.6) |
|
3 |
3 |
|||||
|
|
|
|
Ucz = −(Uaz +Ubz ).
Алгоритмы работы векторного модулятора аналогичны рассмотренным выше в разд. 7.2.
Синтез регуляторов системы векторного управления активным выпрямителем может быть выполнен на основе принципов подчиненного регулирования с учетом компенсации влияния перекрестных связей и возмущающих воздействий.
Структурная схема контура тока по оси x изображена на рис.15.5.
|
|
1 |
|
U g |
|
|
Ixz |
|
Kп |
|
Urx |
|
Ix |
H РТ ( p) |
Urxz |
Kп |
1/ R |
|||
|
|
Tп p +1 |
|
Tp +1 |
|
|
|
|
1 |
|
|
ωu LI y |
|
|
|
Kп |
|
|
|
Рис.15.5. Структурная схема контура тока фазы x
Выполняя стандартную настройку контура на модульный оптимум, с учетом компенсации действия возмущающих факторов, получим ПИ-регулятор тока:
H PT (P) = K pi + |
Kii |
, |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||||
|
|
|
L |
P |
|
|
R |
|
|
||
где K |
pi |
= − |
|
; K |
ii |
= − |
, T |
=T , |
|||
|
|
|
|||||||||
|
|
2TктKп |
|
2TктKп |
кт |
п |
|||||
|
|
|
|
|
|
|
|||||
Kп – коэффициент передачи выпрямителя; Tп – постоянная времени выпрямителя, равна периоду модуляции; Tкт – малая некомпенсируемая постоянная времени контура тока.
304

Синтез процессов в контуре тока по оси y (рис.15.6) выполняется
аналогично. Структура и параметры регуляторов тока по осям x и y получаются одинаковыми.
I yz |
Uryz |
Kп |
Ury |
1/ R |
I y |
|
HРТ ( p) |
Tп p +1 |
|
Tp +1 |
|
|
1 |
|
|
ωu LIx |
|
|
Kп |
|
|
|
Рис.15.6. Упрощенная структурная схема контура тока фазы y
Передаточные функции замкнутых контуров тока по осям x и y
принимают вид
Hктx ( p) = Hктy ( p) = 2Tкт2 p2 +12Tкт p +1 .
На рис.15.7 изображена структурная схема объекта управления с учетом выполненного синтеза процессов в контурах тока.
Urx |
|
|
|
|
Ixz H ктx ( p) |
|
Id |
Iн |
Ud |
|
3 |
1 |
||
I yz |
2 |
|
Cp |
|
|
|
|
||
H ктy ( p) |
|
|
|
|
Ury
Рис.15.7. Структурная схема объекта управления
В целях исключения обмена реактивной энергией принимаем I yz = 0 . Заметим, что структурная схема объекта управления в конту-
ре регулирования напряжения является существенно нелинейной. Выполним ее линеаризацию с учетом следующих соотношений:
U rx U g ; U d KuU g , |
Urx |
|
1 |
, |
|
|
|||
|
Ud |
Ku |
||
305

где U g – амплитуда напряжения сети; |
Ku |
= |
|
|
Udz |
(Udz – заданное |
|
|
|
||||
|
|
|
U g nom |
|||
значение выходного напряжения выпрямителя; |
U g nom – номинальное |
|||||
значение амплитуды напряжения сети).
В результате получим следующую структурную схему контура регулирования напряжения (рис.15.8).
Udz |
|
|
Ix |
3 |
Id |
Iн |
Ud |
H pu ( p) |
Hктx |
1 |
|||||
|
( p) |
2Ku |
|
Cp |
|
||
Рис.15.8. Структурная схема контура регулирования напряжения |
|
||||||
Выполняя настройку контура на симметричный оптимум, получим ПИ - регулятор напряжения:
H pu (P) = K p + |
Ki |
, |
|
|
|
|
|||||
p |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
где K |
p |
= |
Ku C |
; K |
|
= |
|
Ku C |
(T |
= 2T – малая некомпенсируемая |
|
|
|
|
|||||||||
|
|
3T |
|
|
i |
|
12T 2 |
ku |
кт |
||
|
|
|
ku |
|
|
|
|
|
ku |
|
|
постоянная времени контура напряжения).
Передаточная функция замкнутого контура напряжения с ПИрегулятором
H з (P) = |
|
|
4Tku P +1 |
|
|
. |
||
8T 3 |
P3 |
|
4T P +1 |
|||||
u |
+8T 2 |
P2 |
+ |
|
||||
|
ku |
|
ku |
|
|
ku |
|
|
Для приведения передаточной функции к стандартному виду, соответствующему фильтру Баттерворта 3-го порядка, на вход контура регулирования напряжения включается фильтр 1-го порядка с передаточной функцией
HФ (P) = |
1 |
|
. |
|
4Tku P +1 |
||||
|
|
|||
16. Система управления вентильно-индукторным двигателем
Рассмотрим пример построения системы управления вентильноиндукторным двигателем [53,12]. Для электропривода с независимым
306
формированием фазных токов структурная схема системы управления ВИП представлена на рис.16.1. Варианты реализации схем силовой части такого привода рассмотрены в гл. 5 .
ПИ-регулятор скорости синтезирован согласно принципам подчиненного регулирования. Настройка на симметричный оптимум обеспечивается при следующих значениях коэффициентов пропорциональной и интегральной частей регулятора:
k pω = |
|
Jki |
; |
kiω = |
|
Jki |
|
, |
||
2C |
m |
k T |
8C |
m |
k T |
2 |
||||
|
|
ω ω |
|
|
|
ω ω |
|
|||
где ki , kω– коэффициенты датчиков тока (ДТ) и скорости; Cm – кон-
станта двигателя, представляющая собой среднее значение коэффициента пропорциональности между фазным током и электромагнитным
моментом; Tω – малая некомпенсируемая постоянная времени контура
скорости.
На выходе регулятора скорости формируется задание на максимальное значение тока фазы двигателя. Параметр регулятора OgrRω
ограничивает фазный ток на предельно допустимом уровне в динамических режимах работы привода и в режимах перегрузок.
Формирователь заданных токов на основе информации о максимальном значении заданного тока и угловом положении ротора формирует на своих выходах мгновенные значения токов задания для всех фаз двигателя. Алгоритм работы формирователя заданных токов включает в себя следующие операции:
-определение знака электромагнитного момента;
-расчет угла опережения тока относительно положения ротора (для работы ВИП на скорости выше номинальной);
-формирование желаемых зависимостей заданных токов фаз, в частности синусоидальных и трапециевидных с задаваемым относи-
тельным положением угловых точек трапеции.
Регулятор фазных токов включает в себя m идентичных релей-
ных трехуровневых регуляторов. Уровень 1 соответствует подключению к фазе напряжения +Ud , уровень 2 – подключению к фазе на-
пряжения −Ud , уровень 0 – замыканию фазы накоротко (подключе-
нию нулевого напряжения). Желаемое значение отклонений реальных фазных токов от токов задания устанавливается с помощью двух поро-
говых величин δ1 ,δ2 , определяющих два уровня гистерезиса характеристики «вход–выход» релейного регулятора. При работе на малой петле гистерезиса состояние фазы −Ud из работы исключается, что обеспечивает существенное уменьшение частоты переключений при
307

заданной величине токовой ошибки и, как следствие, снижение дополнительных потерь в системе «преобразователь – двигатель». В случае если собственная противоЭДС фазы при замыкании накоротко оказывается не в состоянии обеспечить необходимое направление движения токовой ошибки, то контур тока переходит на работу по большой пет-
ле гистерезиса, использующей состояние −Ud .
OgrRω |
Ud |
|
ωz |
Регулятор |
|
|
|
|
|
|
|
|
|
|
|
Регулятор |
U |
|
|
Формиро- |
|
|
|
|
|
IGBT |
||||||||||
Izm |
|
|
|
|
Izk ∆Ik |
|
токов |
уk |
|
|
|
коммута- |
|||||||||||||||||||||
скорости |
Формиро- |
|
ватель |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
ватель |
1 |
|
|
|
импульсов |
|
|
|
|
|
тор |
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
заданных |
m |
|
|
|
|
|
0 |
|
|
m |
|
управ- |
|
2m |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
токов |
|
|
|
|
|
|
|
−1 |
|
|
|
|
|
ления |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δ |
|
|
|
|
IGBT |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
k |
|
|
, k |
,T |
|
|
|
|
|
|
|
|
|
|
|
|
δ2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
pω |
|
iω |
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ik |
|
|
m |
|
|
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
|
i |
ДТ |
|
|
|
|
|
|
|
ω |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Θ |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Вычисли- |
|
|
|
|
|
|
|
|
|
|
|
|
|
Датчик |
|
|
|
|
|
ИД |
|||||||||
|
|
|
|
|
|
|
|
тель |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
положения |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
скорости |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ротора |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
kω
Рис.16.1. Структурная схема системы управления ВИП
Формирователь импульсов управления формирует сигналы управления всеми 2m транзисторами IGBT-коммутатора, коммутирующего напряжение источника питания на обмотки индукторного двигателя.
Система управления 6-фазным ВИП с общей точкой (схему сило-
вой части см. рис.5.7,б) имеет ряд отличительных особенностей от рассмотренной выше системы управления m -фазным ВИП с независимым управлением фазами. Во-первых, это наличие дополнительных операций прямого и обратного преобразований координат от системы реальных (измеряемых датчиками) токов к системе токов проводящих
фаз (Iα , Iβ , Iγ ) , относительно которых выполняется синтез управ-
ляющих воздействий. Во-вторых, более сложные алгоритмы формирования управляющих воздействий, что определяется необходимостью одновременно учитывать состояния всех трех проводящих фаз и более широкими возможностями при выборе алгоритма коммутации силовых ключей. В-третьих, датчики тока могут устанавливаться не в каждую фазу, а по одному на пару фаз, относящихся к одной «стойке» силовой схемы, так как области проводимости фаз «стойки» не пересекаются. В-четвертых, число проводников, соединяющих преобразователь и двигатель при использовании в качестве датчика тока датчика Холла с окном для пропускания проводников с током, равно
308
m , а не 2m . Под «стойкой» силовой схемы 6-фазного ВИП понимается совокупность двух транзисторов, двух обратных диодов и двух коммутируемых ими обмоток двигателя, работающих в противофазе друг другу. Силовая схема (см. рис.5.7,б) имеет три «стойки», включающие в себя:
1)«стойку» α: VT1 ,VT4 ,VD1 ,VD4 , обмотки фаз 1, 4;
2)«стойку» β : VT3 ,VT6 ,VD3 ,VD6 , обмотки фаз 3, 6;
3)«стойку» γ: VT5 ,VT2 ,VD5 ,VD2 , обмотки фаз 5, 2.
С учетом допущения Iα + Iβ + Iγ = 0 общее количество датчи-
ков тока можно уменьшить до двух.
Рассмотрим более подробно алгоритм регулирования тока и формирования управляющих воздействий 6-фазного ВИП со средней точкой (рис.16.2). Входными сигналами алгоритма являются заданные и
реальные токи ИД в преобразованной системе координат (α, β,γ) и вектор номеров проводящих фаз Nc (Nc _ α , Nc _ β , Nc _ γ ) , компонен-
тами которого являются номера фаз, проводящих токи в «стойках» α, β,γ соответственно. Выходными сигналами алгоритма является 6-компонентный вектор состояния транзисторов преобразователя
SVT (SVT1 , SVT 2 , SVT 3 , SVT 4 , SVT 5 , SVT 6 ) .
Сигналы SVT1...SVT 6 принимают состояния логической единицы, если транзисторы включены, и логического нуля, если транзисторы выключены. Пороговые величины δ1 ,δ2 , как и ранее, определяют
уровень токовых ошибок в скользящем режиме слежения за заданным током и момент перехода с алгоритма управления, использующего нулевые векторы выходного напряжения, к алгоритму управления, использующему максимальный ресурс источника питания. Функция Odd возвращает логическую единицу при нечетном значении своего целочисленного аргумента.
Транзисторы каждой «стойки» преобразователя могут находиться в четырех различных состояниях, три из которых являются разрешенными при формировании алгоритма управления и одно – запрещенным. Состояние, когда оба транзистора «стойки» включены, запрещено исходя из критерия минимизации числа переключений преобразователя. Три разрешенных состояния транзисторов «стойки», а именно верхний – включен, нижний – выключен; верхний – выключен, нижний – включен; оба выключены, обеспечивают формирование всех ее состояний, необходимых для синтеза желаемого алгоритма управления. Таким образом, всего из 26=64 возможных состояний силовых
309

ключей 6-фазного ВИП при формировании алгоритма управления будем использовать 33=27 различных состояния, из которых 12 являются нулевыми, т.е. приводящими к нулевым межфазным напряжениям, а остальные – значащими с межфазными напряжениями, принимающи-
ми значения +Ud ,−Ud ,0 .
|
I zk |
|
Ik |
||
|
|
||||
|
|
|
|
|
k = α,β, γ |
∆Ik = I zk − Ik |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
(∆Iα > δ1)or(∆Iβ > δ1)or(∆I γ > δ1)or |
1 |
|
|
(∆Iα < −δ2 )or(∆Iβ < −δ2 )or(∆I γ < −δ2 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Выбор значащего |
0 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
вектора состояния |
|
∆Ik > 0 |
|||||||||
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
(∆Iα < −δ1)or(∆Iβ |
< −δ1) |
|
|
|
|
|
|
|
|
|
|
|
1 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
or(∆I γ < −δ1) |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Odd(Nc _ k ) =1 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Верхний |
|
|
|
Верхний |
|||||
Nc |
Выбор |
|
|
|
|
Оба |
|
|
транзистор |
|
|
|
транзистор |
||||||||||
нулевого |
|
|
|
|
транзистора |
|
|
k-й "стойки" |
|
|
|
k-й "стойки" |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
вектора |
|
|
|
|
k-й "стойки" |
|
|
выключен, |
|
|
|
включен, |
|||||||
|
|
|
|
состояния |
|
|
|
|
выключены |
|
|
нижний - |
|
|
|
нижний - |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
включен |
|
|
|
выключен |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вектор состояния
преобразователя
SVT
Рис.16.2. Алгоритм регулирования тока и формирования управляющих воздействий 6-фазного ВИП
310