

Виноград(Вектор_управ_АД)321стр
.pdfс обмоткой возбуждения и демпферной обмоткой. На примере синхронного привода серии ЭПВ описана процедура синтеза регуляторов. Рассмотрен принцип действия электропривода с бесконтактным двигателем постоянного тока, который является «близким родственником» синхронной машины с постоянными магнитами.
14.1. Пример построения системы векторного управления синхронным двигателем с постоянными магнитами
Рассмотрим построение системы векторного управления синхронным двигателем с постоянными магнитами (СДПМ).
Область применения таких систем: высококачественный электропривод подач металлорежущих станков. Основные характеристики контура регулирования скорости: диапазон регулирования – не менее 10000, полоса пропускания – не менее 100 Гц.
Синтез системы управление выполним на основе динамической модели СДПМ в системе координат (d,q) , ориентированной по магнитной оси ротора [39]:
dId |
= |
|
1 |
|
(U |
d |
− R I |
d |
+ωL I |
q |
); |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
dt |
|
Ld |
|
|
|
s |
|
q |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
dIq |
= |
|
1 |
(U |
q |
− R I |
q |
−ωL I |
d |
−ωΨ |
f |
); |
||||||||||||||
|
|
|
|
|
||||||||||||||||||||||
dt |
|
Lq |
|
|
|
s |
d |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(14.1) |
|||||||||||
dΩ |
= |
|
1 |
(M −MC −β Ω); |
|
|
ω = ZPΩ; |
|||||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||
dt |
J |
|
|
|
[Ψ |
|
|
|
|
|
|
|
|
|
|
], |
|
|
||||||||
M = |
3 |
|
Z |
|
|
|
I |
|
+(L − L )I |
|
I |
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
2 |
|
|
|
P |
|
f |
|
q |
|
|
|
d q |
|
d |
|
q |
|
|
|
|||||||
где Id , Iq , Ud , Uq – токи и напряжения статора по осям d и q; М, МС – электромагнитный и нагрузочный моменты; ω – частота вращения ротора, электрическая; J – момент инерции ротора; β – коэффициент вязкого трения (коэффициент демпфирования); Ψf – потокосцепление, создаваемое постоянным магнитом; Ld , Lq – индуктивности обмотки статора по продольной и поперечной осям ротора.
Для частного случая неявнополюсной конструкции ротора двигателя Ld = Lq = Ls .
Функциональная схема системы векторного управления СДПМ изображена на рис.14.1.
271

U d
ωz |
|
÷ |
Iqz |
|
|
U |
U |
|
|
|
|
|
|
qz |
|
||
|
|
|
|
|
|
az |
|
|
|
|
|
|
Ukq |
|
|
|
|
|
|
|
|
Id |
|
|
|
|
|
|
|
|
|
|
U |
|
|
|
+ |
(Ld − Lq )Id |
ωψ |
|
|
Uупр |
||
1 |
|
|
|
|
|
bz |
|
|
|
|
Ψf |
|
Ψf |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Idz |
Iq |
Ukd |
Udz |
Ucz |
|
|
|
|
|
|
||||
272 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Id |
|
Ia |
|
|
|
|
|
|
Iq |
|
Ib |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕr |
|
|
|
|
|
|
|
|
ω |
|
Рис.14.1. Функциональная схема системы векторного управления СДПМ |
|
|
||||||
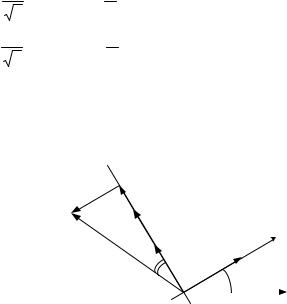
Нулевое задание тока по оси d обеспечивает минимизацию тока статора при заданной величине момента нагрузки. В этом случае ток статора во всех режимах работы привода направлен перпендикулярно магнитной оси ротора (по оси q) в соответствии с векторной диаграммой двигателя на рис.14.2.
Преобразователь координат ABC → dq выполняет преобразование фазных токов статора АД из естественной трехфазной системы координат (А,В,С) в ортогональную синхронную систему координат
(d,q) по уравнениям |
π ) + I B sin(ϕr )]; |
|||
Id |
= |
2 |
[I A sin(ϕr + |
|
|
|
3 |
|
3 |
|
|
|
|
(14.2) |
Iq |
= |
2 |
[I A cos(ϕr + |
π ) + I B cos(ϕr )], |
|
|
3 |
|
3 |
где ϕr – угловое положение ротора (электрическое), полученное с дат-
чика положения.
Алгоритмы работы преобразователя напряжений и векторного модулятора аналогичны рассмотренным в разд. 11.4 для векторной сис-
темы управления асинхронным двигателем.
 q
q
−ωLq Iq R I |
q |
|
|
|
|
s |
|
|
|
||
E = ωΨf |
|
|
|
||
U s |
Is = Iq |
|
d |
||
γ |
Ψf |
||||
|
|
ϕr |
A |
||
|
|
|
|||
|
|
|
|
|
|
0
Рис.14.2. Векторная диаграмма СДПМ
Блок компенсации перекрестных связей работает по следующим уравнениям:
U |
kd |
= − |
1 |
L ωI |
q |
; |
|
|
||||
|
|
|
|
|||||||||
|
|
|
|
|
q |
|
|
|
|
|||
|
|
|
|
kпч |
|
|
|
|
(14.3) |
|||
|
|
|
1 |
|
|
|
|
|
|
|||
U |
kq |
= |
ω(L I |
d |
+ Ψ |
f |
) . |
|||||
|
||||||||||||
|
|
|
|
|
d |
|
|
|||||
|
|
|
kпч |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
273 |
|

Синтез регуляторов осуществим на основе принципов подчиненного регулирования с использованием метода компенсации нелинейных связей.
Выполним синтез регулятора тока по оси d.
Структурная схема контура тока по оси d изображена на рис.14.3.
Idz |
|
|
|
|
Udz |
|
|
|
|
|
|
|
|
1 |
|
|
Id |
||||
|
|
К |
пч |
|
RS |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
HРT ( p) |
|
|
|
|
Тпч p +1 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
Тd p +1 |
|
||||||||||||||
|
|
U kd |
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
1 |
|
|
|
|
|
|
|
ω Lq Iq |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Kпч |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Kдт |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Рис.14.3. Структурная схема контура тока по оси d
Обозначения: Td = Ld – постоянная времени статорной цепи по оси
Rs
d; U kd = − |
1 |
ωLq Iq – сигнал компенсации влияния нелинейной |
|
||
|
Kпч |
|
перекрестной связи.
Считая влияние перекрестной связи полностью скомпенсированным, выполним настройку контура на модульный оптимум с малой не-
компенсируемой постоянной времени Tкт =Tпч . В результате полу-
чим: |
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
К |
|
К |
|
|
|
|
|
|
|
|
|
|
|
|
||
H РТ (s) |
|
пч |
дт Rs |
|
= |
|
1 |
|
|
; |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||||||||
(Tкт p +1)(Td p +1) |
2Tкт |
p (Tкт p +1) |
|
|
|
|||||||||||||
|
|
|
|
|
|
|
||||||||||||
H РТ (s) |
= |
Rs (Td s +1) |
= |
|
|
Ld |
|
+ |
|
Rs |
|
1 |
. |
|||||
2КпчКдтTкт p |
|
2КпчКдтTкт |
2КпчКдтTкт |
|
||||||||||||||
|
|
|
|
|
|
p |
||||||||||||
Таким образом, коэффициенты пропорциональной и интегральной составляющих ПИ регулятора тока по оси d определяются выражениями
K pid = |
|
|
Ld |
|
; Kiid = |
|
|
Rs |
|
. |
||
2К |
пч |
К |
дт |
T |
2К |
пч |
К |
дт |
T |
|||
|
|
|
кт |
|
|
|
кт |
|||||
Передаточная функция замкнутого контура тока
274

H кт ( p) = |
|
1 kдт |
|
|
|
. |
|
2T 2 |
p2 + 2T p +1 |
||
|
кт |
кт |
|
Синтез регулятора тока по оси q выполняется аналогично, с уче-
том следующих условий:
1) Tq = |
Lq |
; H РТ (s) = |
Lq |
+ |
Rs |
1 |
; |
|
Rs |
2КпчКдтTкт |
2КпчКдтTкт |
|
p |
||||
|
|
|
|
|
||||
2) Сигнал возмущающей перекрестной связи, подлежащей компенсации, имеет вид
U kq =ω(Ld Id + Ψf ) .
Выполним синтез регулятора скорости.
Структурная схема контура скорости для общего случая изображена на рис.14.4.
Второй (реактивной) составляющей момента (см. последнее уравнение системы (14.1)) можно пренебречь в следующих случаях:
1)для неявнополюсных машин (Ld = Lq);
2)при управлении по закону Id = 0 для любых типов СДПМ. В этих случаях
M = |
3 |
ZP Ψf Iq , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(14.4) |
|||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где Ψf = const . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
ωz |
|
|
|
|
|
|
÷ |
|
|
|
|
|
Iq |
|
|
|
|
|
|
|
|
|
|
|
Mc |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
(L |
−L )I |
|
3 |
ZP |
M |
|
|
1 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
H РС( p) |
|
|
|
|
|
|
Hкт( p) |
|
|
|
d |
|
q d |
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
Ψf 1+ |
|
|
|
|
|
|
2 |
|
|
|
|
|
Jp +β |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ψf |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
(Ld − |
Lq )Id |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
1 |
+ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
Ψf |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HФС( p) |
|
|
|
|
|
|
Kдc |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.14.4. Структурная схема контура скорости
Для частного случая β = 0 настройка контура скорости выполня-
ется на симметричный оптимум. В результате получается ПИрегулятор скорости с передаточной функцией
275
H рс ( p) = kωp |
+ |
kωi |
, |
|
|
|
|
|
|
|
|
|
|
|
|
||
p |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
где kωp = |
|
|
Кдт J |
|
|
|
; kωi = |
|
Кдт J |
|
|
|
; |
||||
3T |
Ψ |
f |
Z |
P |
K |
дс |
12T 2 |
Ψ |
f |
Z |
P |
K |
|
||||
|
кс |
|
|
|
|
|
кс |
|
|
|
дс |
||||||
Tкс = 2Tкт +Tфс , Tфс – постоянная времени фильтра скорости.
Для общего случая β ≠ 0 настройка контура скорости выполняется на модульный оптимум.
14.2. Принцип действия электропривода с бесконтактным двигателем постоянного тока
Работу самоуправляемого синхронного двигателя удобно рассмотреть на примере электропривода с бесконтактным двигателем постоянного тока, работающего при прямоугольной форме тока статора [34]. Структура привода может быть представлена в виде рис.14.5,а. Для упрощения рассмотрения принято, что число пар полюсов обмотки статора равно единице, это позволяет не различать физическое и электрическое пространства, а нагрузка на валу отсутствует. Обмотки фаз статора А, В, С получают питание от автономного инвертора тока (АИТ), в котором управление ключами, обозначенными цифрами 1 – 6, осуществляется датчиком положения ротора (ДПР). В рассматриваемом случае ротор датчика выполнен в виде сегмента, расположенного на валу двигателя и вращающегося вместе с ним.
На неподвижной части датчика расположены шесть чувствительных элементов, пронумерованных цифрами 1–6, так же как и ключи инвертора. Когда сегмент перекрывает собой данный чувствительный элемент, элемент активизируется и через систему управления инвертором (СУИ) воздействует на соответствующий ключ инвертора, замыкая его и удерживая в замкнутом состоянии все время, пока элемент перекрыт вращающимся сегментом. В любой момент времени замкнут
один ключ из группы 1 – 3 – 5 и один из группы 4 – 6 – 2 и ток I sd протекает через две фазы обмотки статора двигателя. Если допустить определенную идеализацию и считать, что переключение активных элементов ДПР происходит без перекрытия, т. е. в любой момент времени замкнуты только два ключа инвертора, то можно проиллюстрировать замкнутые состояния ключей и фазные токи графиками, приведенными на рис.14.5,б.
При ωt = ωt0 ротор занимает положение, показанное на рис.14.5,а. Этому соответствует замкнутое положение ключей инвер-
276

тора 1 и 6, а вектор потока ротора Ф и ориентированная по нему продольная ось d вращающейся системы координат (d, q) , связанной с ротором, направлены горизонтально. Если обозначить угол поворота ротора относительно неподвижной системы координат (α, β) через
θc , то этому положению соответствует значение θc = 0 .
а) |
б)
Рис.14.5. Бесконтактный двигатель постоянного тока: а – структура двигателя; б – алгоритм включения ключей инвертора и форма фазных токов
На рис.14.6 для трех моментов времени показано взаимное расположение пространственных векторов намагничивающих сил FsA , FsB ,
277

FrsC фазных обмоток статора. В каждый момент времени ток I sd протекает через две из них. Там же показано положение вектора результирующей намагничивающей силы Fs и магнитного потока ротора Ф.
Вектор результирующей намагничивающей силы определен как геометрическая сумма намагничивающих сил двух фаз, обтекаемых током, с учетом направления тока относительно начала и конца обмотки. Начала обмоток отмечены значком *.
При вращении двигателя против хода часовой стрелки в момент времени t1 , непосредственно следующий за моментом времени t0 (см.
рис.14.5,а), замкнулся ключ инвертора 2 вместо разомкнувшегося ключа 6. Ток протекает от начала к концу фазы А и от конца к началу
фазы С, что определяет положение векторов FsA и FsB и результи-
рующего вектора Fs (см. рис.14.6,а). Ротор, а следовательно, и свя-
занный с ним вектор потока Ф еще находятся в положении, показанном на рис.14.5,а. Двигатель развивает электромагнитный момент
M Д =r 32 Z p | Frs || Фr | sinθ ,
где | Fs |, | Ф| – модули намагничивающей силы и магнитного пото-
ка ротора соответственно; θ – угол между векторами, равный в данный момент времени 2π / 3 рад.
а) |
б) |
в) |
Рис.14.6. Положение пространственного вектора намагничивающей силы в бесконтактном двигателе постоянного тока:
а – при t = t1 ; б – при t = t2 ; в – при t = t3
Под действием электромагнитного момента ротор двигателя поворачивается против часовой стрелки и угол θ уменьшается. Когда он
278
уменьшится до значения π / 2 , момент двигателя достигнет максимума, а при дальнейшем уменьшении угла момент начнет уменьшаться.
Когда при ωt = ωt2 угол θ станет равным θc = π / 3 рад (см. рис.14.6, б), момент двигателя уменьшится до значения, существовавшего при ωt = ωt1 . Если бы состояние ключей инвертора и далее оставалось неизменным, то ротор продолжал бы поворачиваться, стремясь к положению, при котором пространственные векторы Fs и Ф
совпадают. Однако при θ = π / 3 рад разомкнётся ключ 1 и замкнется ключ 3, что соответствует ωt = ωt3 (см. рис.14.5). В результате век-
тор Frs скачком повернется на π / 3 рад (см. рис.14.6, в). Взаимное
расположение векторов оказывается при этом таким же, как и на рис.14.6,а, но положение ротора отличается от исходного положения
на π / 3 рад. Описанный процесс повторяется непрерывно, и двигатель вращается.
Момент двигателя и скорость имеют пульсирующий характер. Уровень пульсаций скорости при данном уровне пульсаций момента двигателя зависит от момента инерции привода и проявляется тем больше, чем момент инерции меньше.
Так же как в приводе с асинхронным двигателем, работающим с автономным инвертором тока, в приводе с описанным двигателем необходимо наличие замкнутого контура регулирования скорости. Тогда изменение, например увеличение сигнала задания скорости, приводит
к увеличению значения тока Id и намагничивающей силы Fs . Мо-
мент двигателя увеличивается, что, в свою очередь, вызывает увеличение скорости. Если момент нагрузки при этом остается неизменным,
то по окончании переходного процесса ток Id , а следовательно, и мо-
мент двигателя вернутся к прежнему значению.
Наличие существенных пульсаций момента и связанная с этим неравномерность вращения двигателя являются одним из основных недостатков рассмотренного принципа построения привода. Этот недостаток устраняется переходом к синусоидальной форме тока в обмотках статора. Частота этого тока, так же как и в рассмотренной схеме, должна определяться датчиком положения ротора.
14.3. Принцип построения и математическое описание электропривода с вентильным двигателем на основе двухфазной синхронной машины
279

Примером электропривода с вентильным двигателем на основе двухфазной синхронной машины с постоянными магнитами на роторе является привод с двигателем ДБМ. Структура электропривода с двигателем ДБМ представлена на рис.14.7,а [26]. На обмотки статора А и В, сдвинутые в пространстве друг относительно друга на угол
90°/ Z p , т.е. на 90 эл. град., подаются синусоидальные напряжения
переменного тока U sA и U sB . Для образования кругового вращающегося магнитного поля эти напряжения должны быть сдвинуты друг от друга на ω0элt = 90° во времени. Усилители мощности УА и УВ
усиливают входные синусоидальные сигналы U sAz и U sBz , поступающие с преобразователя координат (ПК). Преобразователь координат преобразует сигналы постоянного тока Udz и U qz в сигналы пе-
ременного тока. Вектор потока постоянных магнитов Ф и вектор потокосцепления статора от этого потока Ψf , жестко связанные с рото-
ром, направлены по продольной оси d . Вектор Ψf показан на рис.14.7,б. Угол θc , представляющий собой текущее значение угла поворота вращающейся системы координат (d, q) относительно неподвижной системы координат (α, β) , является и углом поворота ро-
тора в электрическом пространстве. Он измеряется датчиком положения ротора (ДПР), которым в приводе с двигателем ДБМ служит си- нусно-косинусный вращающийся трансформатор. В дальнейшем будем считать, что датчик положения ротора установлен так, что изме-
ряемый им угол θc равен нулю при совпадении оси d вращающейся системы координат с осью α неподвижной системы координат.
|
θc |
β |
|
|
|
|
Ψf d |
||
Usdz |
UsAz |
q Ψfβ |
||
|
UsA |
|
||
Usqz |
UsBz |
|
θc |
|
U sB |
Ψfα α |
|||
|
||||
|
а) |
|
б) |
Рис.14.7. Вентильный двигатель на основе машины типа ДБМ:
а – структура; б – вектор потокосцепления в двух системах координат
280