

3. Мгновенный центр скоростей
Теорема. В
каждый момент времени при плоском
движении тела, если
![]() ,имеется
единственная точка в плоскости его
движения, скорость которой равна нулю.
,имеется
единственная точка в плоскости его
движения, скорость которой равна нулю.
Эту
точку называют мгновенным
центром скоростей
(МЦС).
Обозначим
её Р.
Для
доказательства теоремы обратимся к
теореме о сложении скоростей . На рис.
точка О имеет
скорость
![]() ,
а тело - угловую скорость
,
а тело - угловую скорость
![]() заданного
направления. Требуется найти такую
точку Р, скорость которой равна нулю.
Для этого запишем теорему, удовлетворяя
заданное условие
заданного
направления. Требуется найти такую
точку Р, скорость которой равна нулю.
Для этого запишем теорему, удовлетворяя
заданное условие
![]() =
0.
Равенство нулю этого выражения возможно
в том случае, если векторы
=
0.
Равенство нулю этого выражения возможно
в том случае, если векторы
![]() и
и
![]() будут в точке
Р равны
по модулю и
противоположны друг другу по направлению:
будут в точке
Р равны
по модулю и
противоположны друг другу по направлению:![]() .
Если
.
Если
![]() ;
;![]() ,
то
,
то .
.
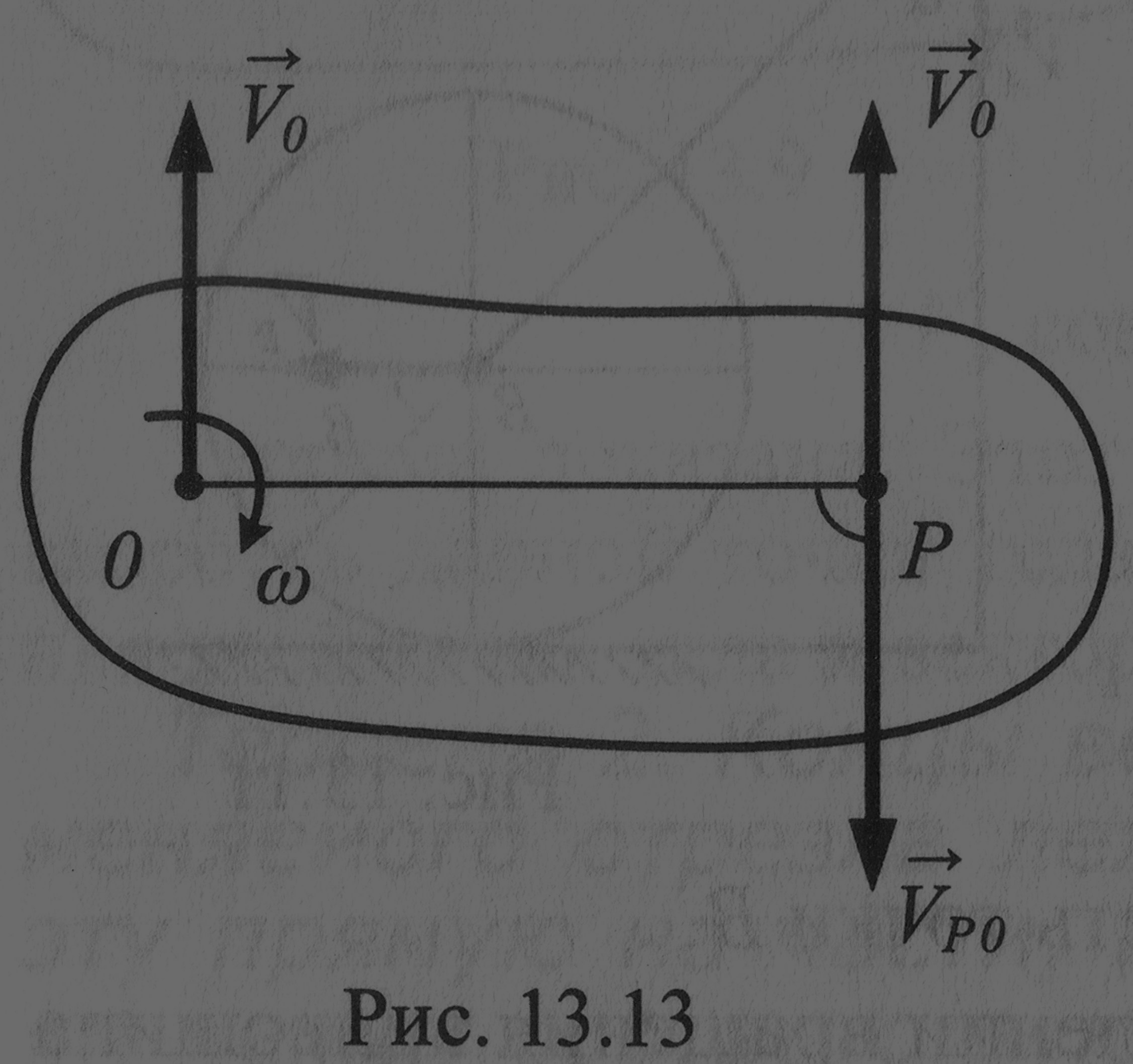
Таким образом,
точка Р –
МЦС на рис.
находится на перпендикуляре к вектору
![]() справа на
расстоянии ОР.
Именно в
этой точке векторы
справа на
расстоянии ОР.
Именно в
этой точке векторы![]() и
и
![]() равны друг
другу по модулю и противоположны по
направлению, поэтому скорость точки Р
равна нулю.
равны друг
другу по модулю и противоположны по
направлению, поэтому скорость точки Р
равна нулю.
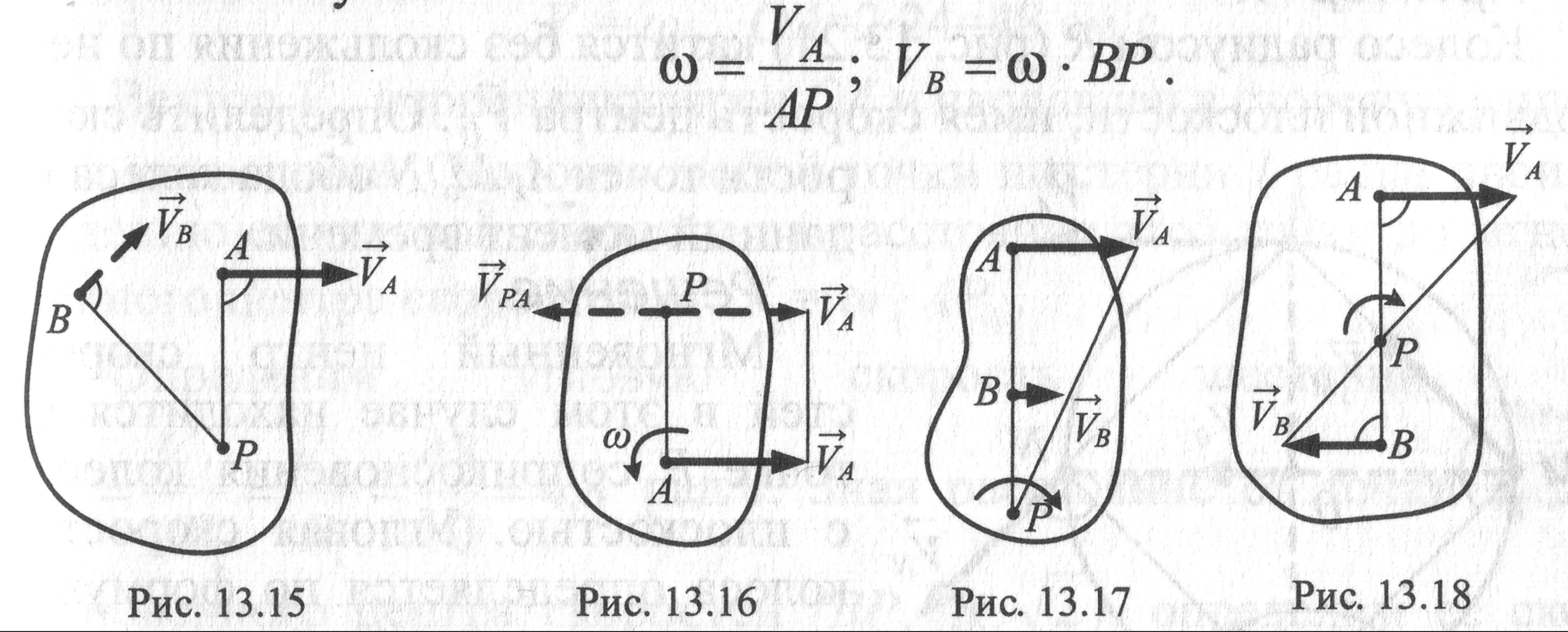
Если положение МЦС известно, то, приняв его за полюс Р, можно определить скорость, например, точки А следующим образом:
 ;
;
 ;
; ,
,
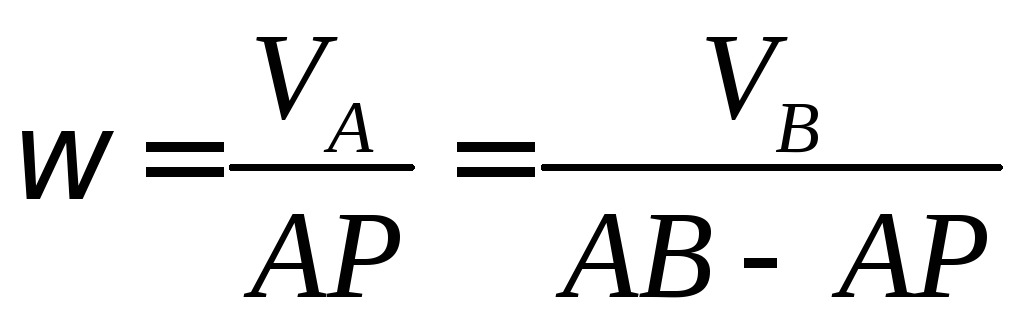
здесь AP – радиус, на котором вращается точка А относительно МЦС.
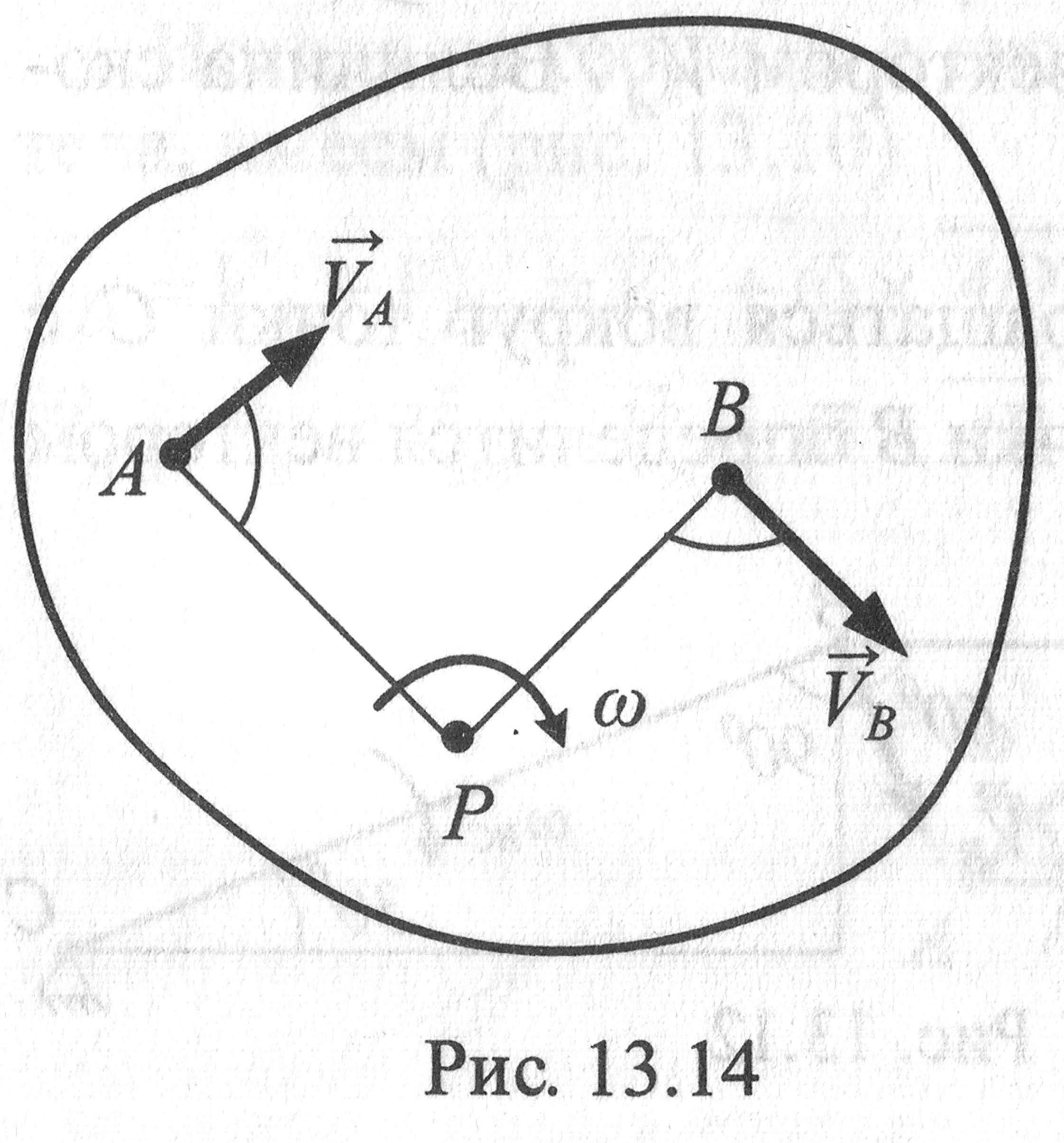
Скорость точки В вычислим аналогично:
![]() ;
;
![]() ;
;![]() .
.
Из полученных
выражений для
![]() и
и![]() имеем
имеем
 или
или
 .
.
Следовательно,
если положение МЦС известно, то скорости
точек тела вычисляют так же, как и в
случае вращения тела в плоскости вокруг
МЦС с угловой скоростью
![]() .
При этом
скорости точек тела пропорциональны
расстояниям от точек до МЦС. Таким
образом, задача расчёта скоростей точек
плоской фигуры упрощается, если известно
положение мгновенного центра скоростей
тела в любой момент времени.
.
При этом
скорости точек тела пропорциональны
расстояниям от точек до МЦС. Таким
образом, задача расчёта скоростей точек
плоской фигуры упрощается, если известно
положение мгновенного центра скоростей
тела в любой момент времени.
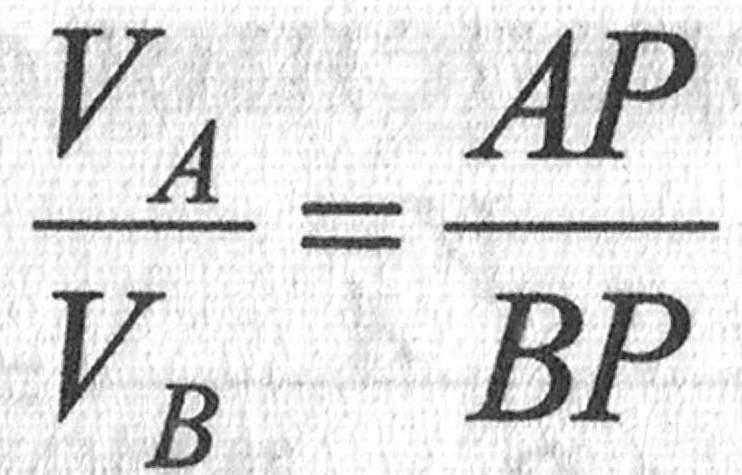
Способы нахождения мгновенного центра скоростей
В некоторых случаях из условия движения удаётся сразу указать точку плоской фигуры, скорость которой в рассматриваемый момент времени равна нулю. Эти точки и являются мгновенными центрами скоростей. В других наиболее общих случаях положения МЦС определяют, рассматривая параметры движения тела и скорости двух точек тела.
Вариант 1. Известна скорость точки А и направление скорости точки В. МЦС находится на пересечении перпендикуляров к скоростям, проведённых в точках А и В .
В этом случае
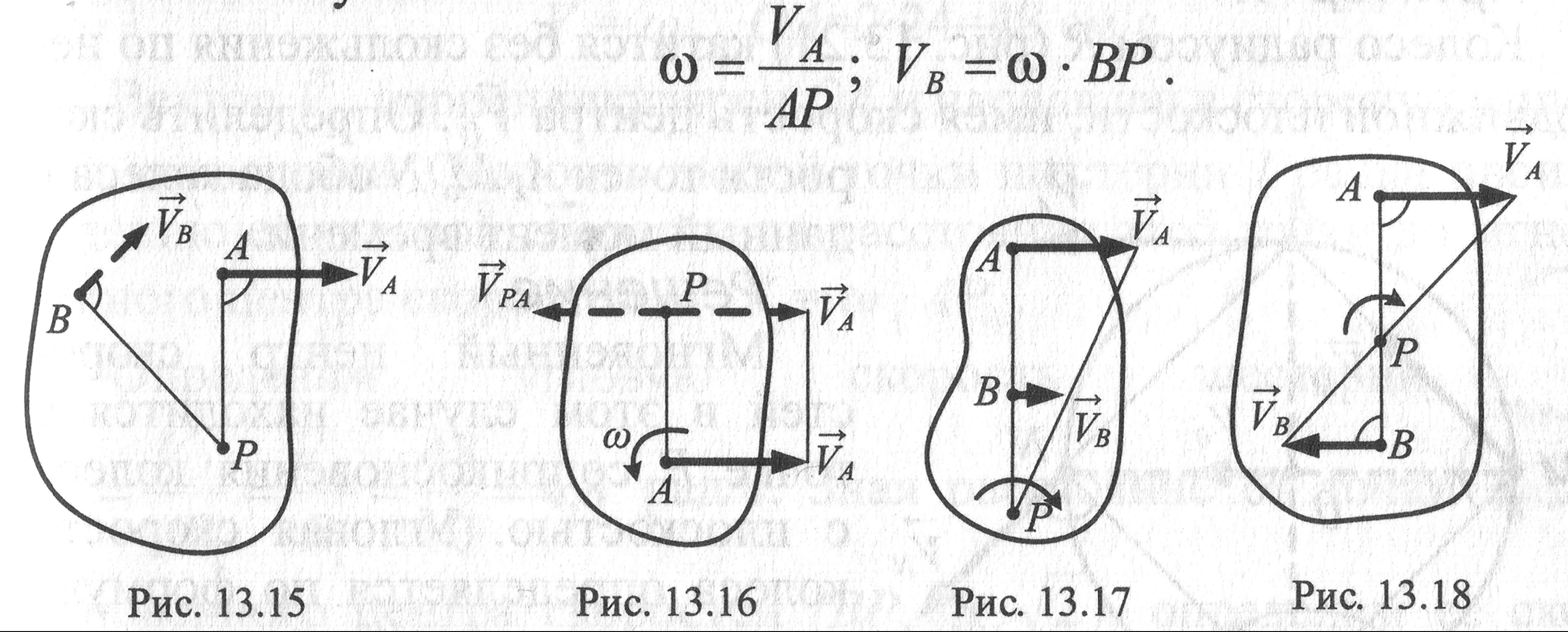
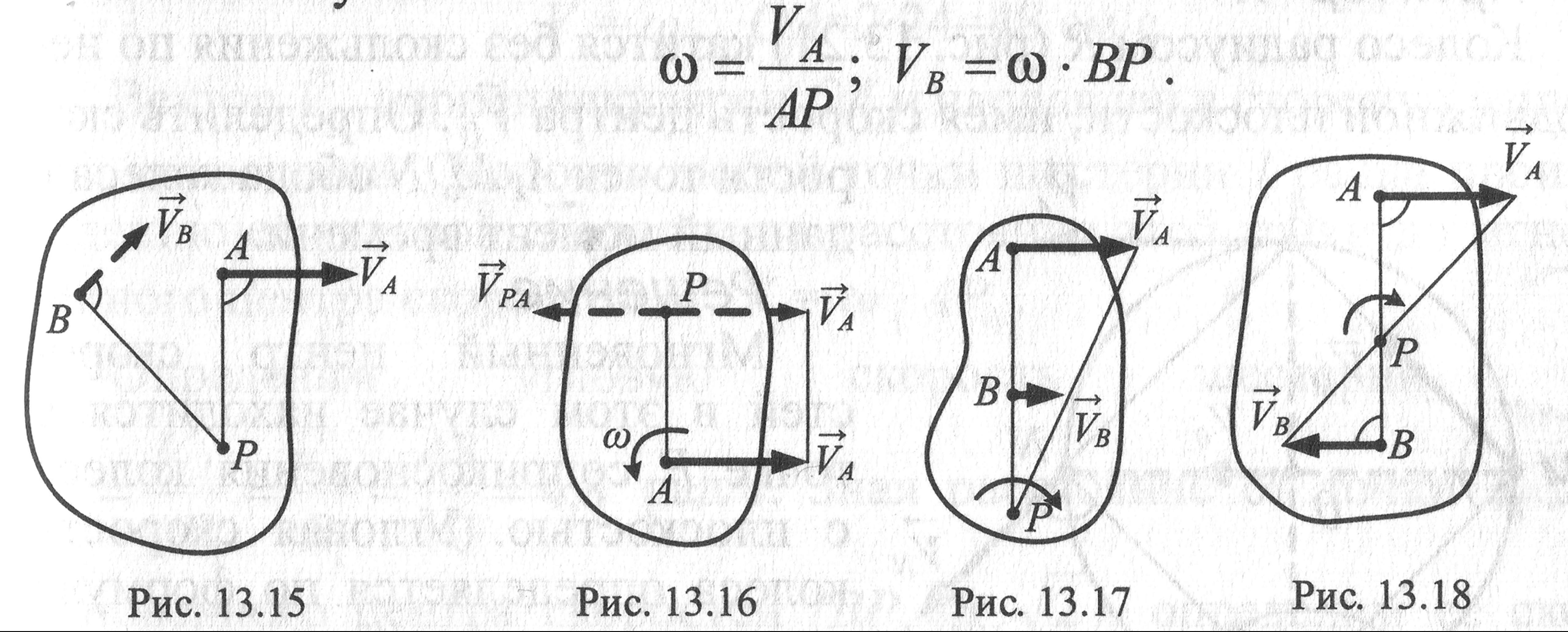
Вариант
2. Известна
скорость точки А тела и угловая скорость
![]() . МЦС находится на перпендикуляре к
вектору
. МЦС находится на перпендикуляре к
вектору![]() в
точке А на расстоянии АРАР=
в
точке А на расстоянии АРАР=![]()
Вариант
3.Известны
длина отрезка АВ, скорости
![]() и
и![]() двух точек тела, которые перпендикулярны
к отрезку АВ и направлены в одну сторону
двух точек тела, которые перпендикулярны
к отрезку АВ и направлены в одну сторону
МЦС находится на
продолжении отрезка АВ в точке пересечения
с прямой, проведенной через концы
векторов
![]() и
и![]() .
Для определения
.
Для определения![]() составляем
выражение
составляем
выражение
 ,
откуда
,
откуда
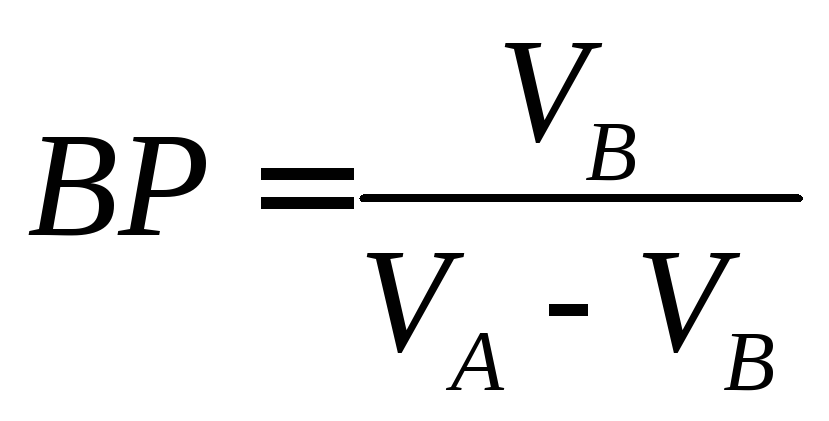 .
.
Вариант
4.
Известны
длина отрезка АВ, скорости![]() и
и![]() двух точек тела, которые перпендикулярны
отрезку АВ и направлены в разные стороны
двух точек тела, которые перпендикулярны
отрезку АВ и направлены в разные стороны
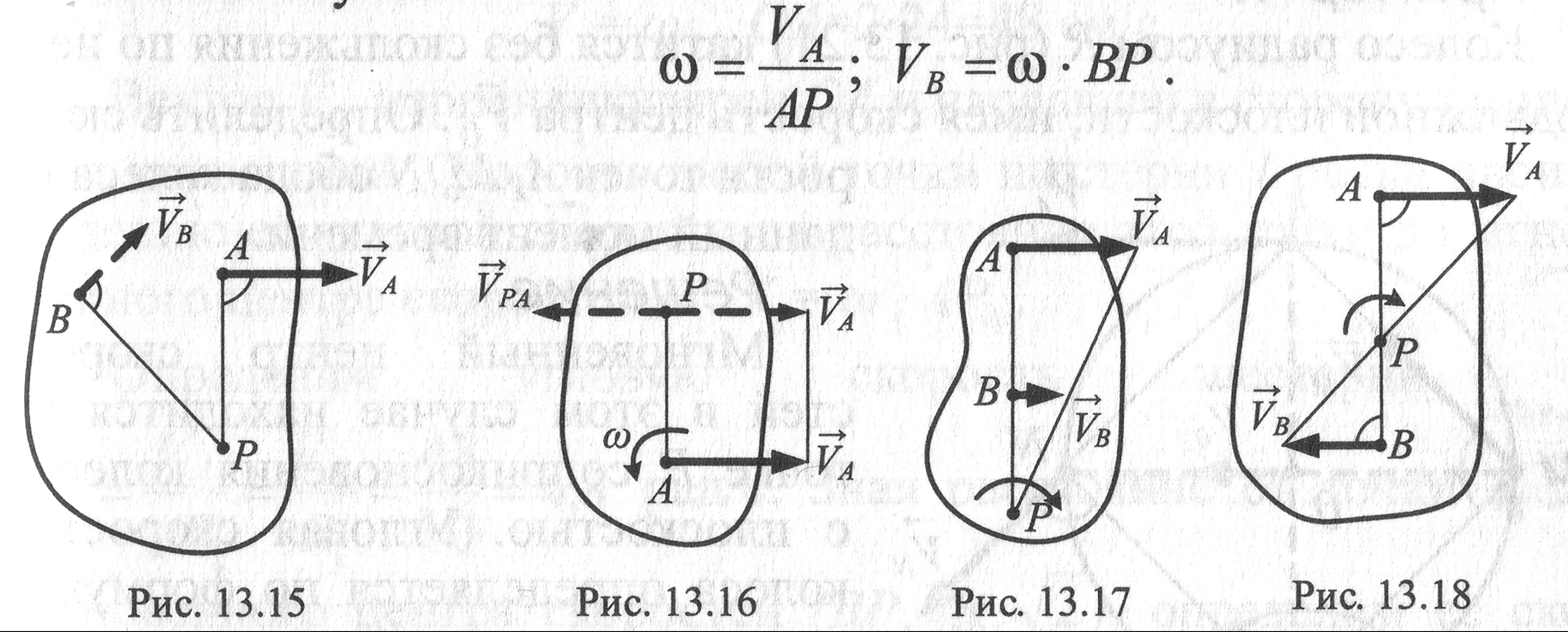
МЦС находится
внутри отрезка АВ. Для определения
![]() составляем
выражение
составляем
выражение
 , откуда
, откуда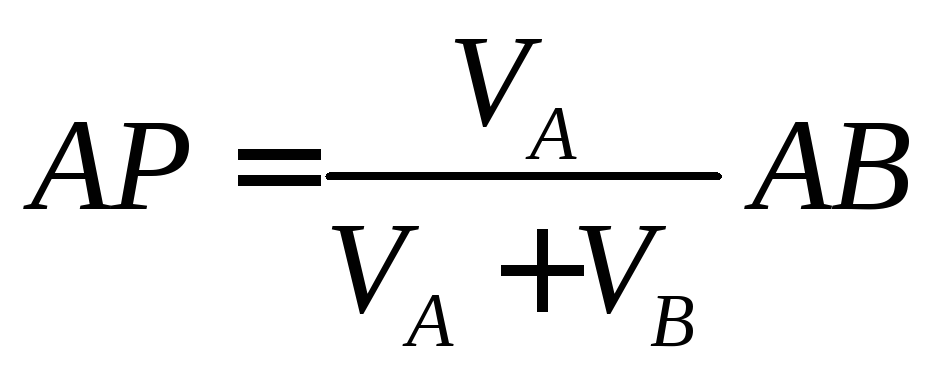 .
.
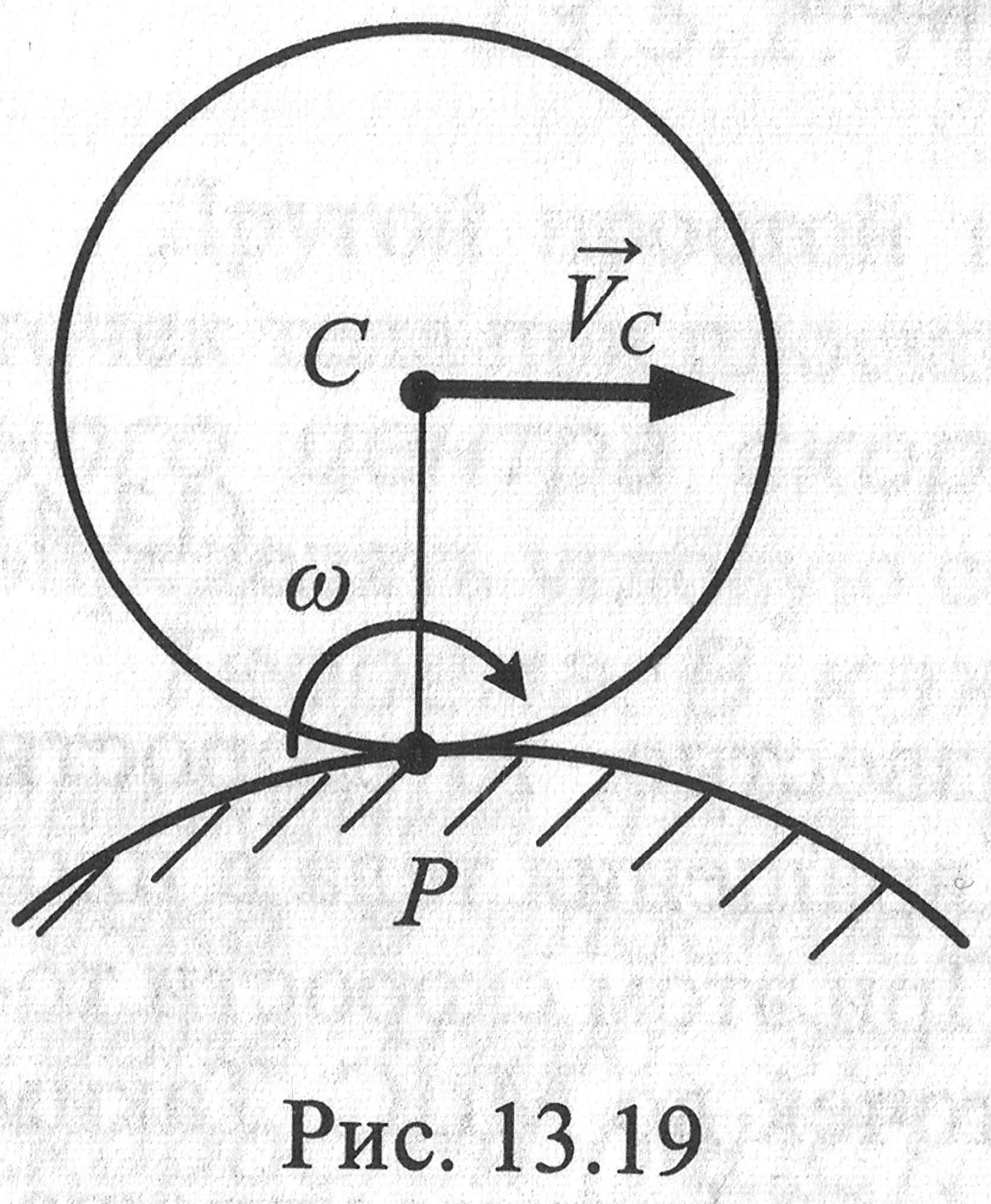
Вариант 5. На рис. тело перекатывается без проскальзывания по поверхности неподвижного тела. МЦС находится в точке соприкосновения тел в точке Р.
Вариант 6. На рис. скорости двух точек тела параллельны. В этом случае МЦС находится в бесконечности, т.е. отсутствует. Тело совершает мгновенное поступательное движение, тогда скорости двух точек и всех других точек тела одинаковы, а их ускорения в общем случае могут быть разными.

Задача
3. Колесо
радиусом R
катится без скольжения по неподвижной
плоскости, имея скорость центра
![]() .
Определить скорости точек А,M,
N
обода колеса в данный момент времени.
.
Определить скорости точек А,M,
N
обода колеса в данный момент времени.
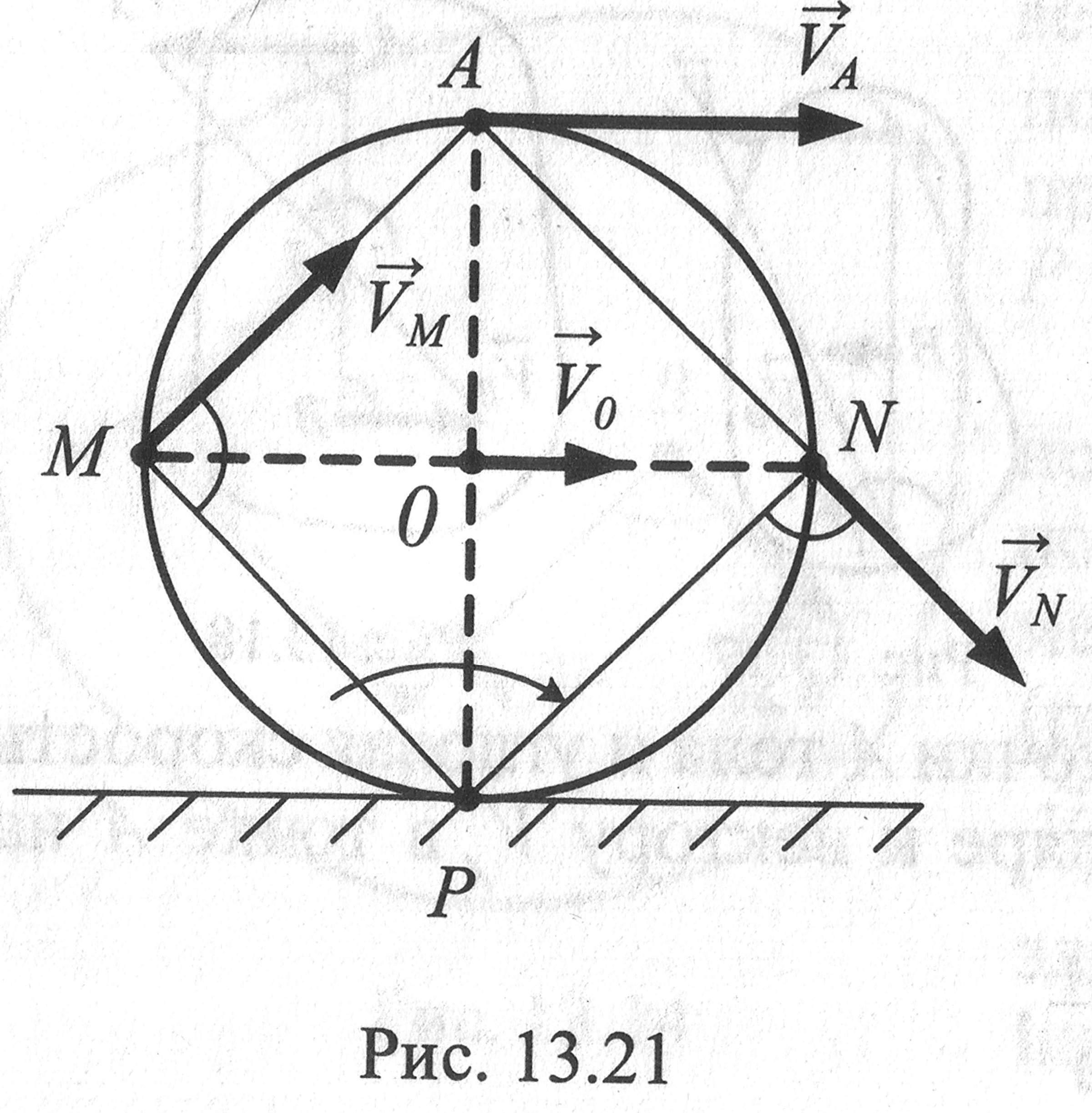
Решение.
Мгновенный центр
скоростей в этом случае находится в
точке Р соприкосновения колеса с
плоскостью. Угловая скорость колеса
определяется по формуле
 .
Скорости указанных точек определим с
помощью МЦС:
.
Скорости указанных точек определим с
помощью МЦС:![]() ;
;![]() ,
т.к.MP=NP=R
,
т.к.MP=NP=R![]() .
.
Скорости точек колеса направлены по перпендикулярам к отрезкам прямых, соединяющих мгновенный центр скоростей с рассматриваемыми точками в направлении вращения.
Задача 4.
Для механизма, изображенного на рис.,
найти скорости точек А, В, С, угловые
скорости шатуна ВС и колеса 1 в момент
времени, когда кривошип ОА находится в
горизонтальном положении, а шатун ВС
вертикален, если угловая скорость
кривошипа
![]() рад/c;
ОА=24 см; ВС=30
см;
рад/c;
ОА=24 см; ВС=30
см;
![]() =10
см.
=10
см.

Для механизма,
изображенного на рис., найти скорости
точек А, В, С, угловые скорости шатуна
ВС и колеса 1 в момент времени, когда
кривошип ОА находится в горизонтальном
положении, а шатун ВС вертикален, если
угловая скорость кривошипа
![]() рад/c;
ОА=24 см; ВС=30
см;
рад/c;
ОА=24 см; ВС=30
см;
![]() =10
см.
=10
см.
Решение.
Заданный плоский
механизм включает следующие звенья:
кривошип ОА, подвижную шестерню 1, шатун
ВС и ползун С. Шестерня 1 катится по
поверхности неподвижной шестерни 2 без
скольжения, совершая плоское движение,
поэтому мгновенный центр скоростей
![]() шестерни
1 находится в точке их соприкосновения.
шестерни
1 находится в точке их соприкосновения.
Используя угловую скорость кривошипа ОА, определим скорость точки А – конца кривошипа ОА и центра шестерни 1:
![]() см/c/
см/c/
Вектор
![]() перпендикулярен
ОА и направлен в сторону вращения
кривошипа. Скорость любой точки шестерни
1 равна произведению её угловой скорости
на расстояние этой точки до мгновенного
центра скоростей
перпендикулярен
ОА и направлен в сторону вращения
кривошипа. Скорость любой точки шестерни
1 равна произведению её угловой скорости
на расстояние этой точки до мгновенного
центра скоростей
![]() :
:![]() =
=![]() .
.
Определим угловую скорость шестерни 1:
 рад/c.
Зная расстояние от точки В до мгновенного
центра скоростей (
рад/c.
Зная расстояние от точки В до мгновенного
центра скоростей (![]() ),
определим её скорость:
),
определим её скорость:

Скорость
![]() направлена
перпендикулярно отрезку
направлена
перпендикулярно отрезку
![]() в сторону
вращения шестерни 1 вокруг мгновенного
центра скоростей. Направление вращения
шестерни 1
установим,
исходя из направления скорости
в сторону
вращения шестерни 1 вокруг мгновенного
центра скоростей. Направление вращения
шестерни 1
установим,
исходя из направления скорости
![]() ,
которая является вращательной скоростью
относительно мгновенного центра
скоростей
,
которая является вращательной скоростью
относительно мгновенного центра
скоростей
![]() .
Шатун ВС
совершает
плоское движение. Мгновенный центр
скоростей
.
Шатун ВС
совершает
плоское движение. Мгновенный центр
скоростей
![]() шатуна
находится в точке пересечения
перпендикуляра к скорости точки В,
являющегося продолжением отрезка
шатуна
находится в точке пересечения
перпендикуляра к скорости точки В,
являющегося продолжением отрезка
![]() ,
и перпендикуляра
к скорости ползуна С, совершающего
прямолинейное движение вдоль направляющей,
наклоненной к горизонту под углом 45°.
,
и перпендикуляра
к скорости ползуна С, совершающего
прямолинейное движение вдоль направляющей,
наклоненной к горизонту под углом 45°.
Скорости всех
точек шатуна являются вращательными
вокруг мгновенного центра скоростей
![]() ,
поэтому
,
поэтому
![]() =
=![]() ;
;![]() .
.
Из равнобедренного
прямоугольного треугольника
![]() найдём, что
найдём, что
![]() см.
см.
Тогда
![]() =67,88
см/с. Угловую скорость шатуна ВС
найдём
используя скорость точки В:
=67,88
см/с. Угловую скорость шатуна ВС
найдём
используя скорость точки В:
 рад/c.
рад/c.
Вектор скорости
точки С
направлен
перпендикулярно к
![]() в сторону
вращения шатуна ВС
вокруг
мгновенного центра скоростей
в сторону
вращения шатуна ВС
вокруг
мгновенного центра скоростей
![]() .
Направление
вращения шатуна установим, исходя из
направления скорости точки В, которая
является вращательной скоростью
относительно мгновенного центра
скоростей
.
Направление
вращения шатуна установим, исходя из
направления скорости точки В, которая
является вращательной скоростью
относительно мгновенного центра
скоростей
![]() .
.
Задача
5. В
положении механизма, схема которого
приведена на рис. 14, определить угловую
скорость шатуна АВ
и скорости точек В
и С,
если
![]() =
2 рад/с,
ОА
= 0,2 м, АВ
= 1,6 м,
ВС
= 0,8 м,
h
= 0,8 м.
=
2 рад/с,
ОА
= 0,2 м, АВ
= 1,6 м,
ВС
= 0,8 м,
h
= 0,8 м.
Решение. Найдем скорость точки А:

Рис. 14
Скорость ползуна В должна: быть направлена по прямой КВ. Мгновенный центр шатуна АВ находится в точке Р пересечения перпендикуляров. Восстановленных к направлениям векторов скоростей точек А и В.
Угловая скорость шатуна АВ равна
![]() .
.
Определим величины АР, ВР, СР:
![]() ,
,
![]() .
.
Тогда
![]() равносторонний:
равносторонний:
![]() .
.
Находим
![]() рад/с,
рад/с,
![]() м/с,
м/с,
![]() м/с.
м/с.
Направление
угловой скорости шатуна
![]() определяется по направлению вращения
вектора
определяется по направлению вращения
вектора
![]() скорости точки
А
относительно мгновенного центра
скоростей. Угловая скорость шатуна
АВ
направлена по часовой стрелке. Скорости
точек В
и С
должны показывать такое же направление.
Для построения вектора
скорости точки
А
относительно мгновенного центра
скоростей. Угловая скорость шатуна
АВ
направлена по часовой стрелке. Скорости
точек В
и С
должны показывать такое же направление.
Для построения вектора
![]() восстанавливаем перпендикуляр к отрезку
СР
и направляем вектор
восстанавливаем перпендикуляр к отрезку
СР
и направляем вектор
![]() в соответствии с направлением
в соответствии с направлением
![]() .
.
Ответ.
![]() = 0,29 рад/с,
= 0,29 рад/с,
![]() = 0,23 м/с.
= 0,23 м/с.
Задача 6. Колесо катится без скольжения по прямолинейному рельсу. Скорость цен-: тра колеса равна 20 м/с, радиус колеса 1 м. Найти скорости точек А, В, D и угловую скорость колеса (рис. 15).
Решение. Мгновенный центр скоростей находится в точке Р соприкосновения колеса и неподвижной поверхности:
![]() рад/с.
рад/с.
Угловая скорость направлена по часовой стрелке. Определим расстояние точек А, В, D до МЦС:
![]() м,
м,
![]() м,
м,
![]() м/с,
м/с,
![]() м/с.
м/с.
Вектор
![]() перпендикулярен прямойАР,
а вектор
перпендикулярен прямойАР,
а вектор
![]() перпендикулярен прямойВР.
Вектор
перпендикулярен прямойВР.
Вектор
![]() перпендикуляренDP.
Направления векторов
перпендикуляренDP.
Направления векторов
![]() ,
,![]() ,
,![]() должны соответствовать угловой
скорости колеса (рис. 15).
должны соответствовать угловой
скорости колеса (рис. 15).

Рис. 15