

2.3 Механическая характеристика
Механическая характеристика представляет собой зависимость момента сопротивления или усилия от скорости рабочей машины. Она необходима для анализа переходных процессов, определения возможности пуска и устойчивой работы электропривода, построения нагрузочной диаграммы привода при пуске и обоснования способа регулирования скорости приводного двигателя.
Механическая характеристика описывается выражением
![]() ,
,
![]() (2.3.1)
(2.3.1)
где ![]() − момент сопротивления, не зависящий
от скорости,
− момент сопротивления, не зависящий
от скорости,
![]() ;
;
![]() − момент сопротивления при номинальной
скорости,
− момент сопротивления при номинальной
скорости,
![]() ;
;
![]() − соответственно текущее и номинальное
значение скорости;
− соответственно текущее и номинальное
значение скорости;
x
− показатель степени, характеризующий
зависимость
![]() от
от
![]() .
.
Для скребковых
транспортеров значение x
рекомендуется принимать равным нулю.
Тогда для навозоуборочных транспортеров
![]() ,
момент трогания
,
момент трогания
![]() рекомендуется принимать равным
(1,1…1,2)
рекомендуется принимать равным
(1,1…1,2)![]() .
.
Значение
![]() определяем из анализа действующих
усилий
определяем из анализа действующих
усилий
![]() при движении транспортера:
при движении транспортера:
![]() ,
,
![]() (2.3.2)
(2.3.2)
где ![]() − КПД передачи.
− КПД передачи.
Для горизонтального транспортера
![]() ,
Н (2.3.3)
,
Н (2.3.3)
 где
где ![]() − максимальное усилие сопротивления
в начале сборки, Н;
− максимальное усилие сопротивления
в начале сборки, Н;
![]() усилие
сопротивления перемещения цепи на
холостом ходу, Н;
усилие
сопротивления перемещения цепи на
холостом ходу, Н;
![]() усилие перемещения навоза, Н.
усилие перемещения навоза, Н.
![]() ,
Н (2.3.4)
,
Н (2.3.4)
где ![]() масса одного метра цепи со скребками,
кг/м;
масса одного метра цепи со скребками,
кг/м;
![]() длина
цепи горизонтального транспортера, м;
длина
цепи горизонтального транспортера, м;
![]() коэффициент трения цепи о дно и стенку
канала.
коэффициент трения цепи о дно и стенку
канала.
![]() Н
Н
![]() ,
Н (2.3.5)
,
Н (2.3.5)
где ![]() усилие сопротивления от трения навоза
о дно и стенки канала, Н
усилие сопротивления от трения навоза
о дно и стенки канала, Н
![]() усилие сопротивления от заклинивания
навоза между скребками, перемещающими
навоз, и стенкой канала, Н.
усилие сопротивления от заклинивания
навоза между скребками, перемещающими
навоз, и стенкой канала, Н.
![]() ,
Н (2.3.6)
,
Н (2.3.6)
где ![]() коэффициент трения навоза о дно и стенки
навозного канала;
коэффициент трения навоза о дно и стенки
навозного канала;
![]() количество навоза, приходящееся на одну
уборку, кг;
количество навоза, приходящееся на одну
уборку, кг;
![]() ,
кг (2.3.7)
,
кг (2.3.7)
где ![]() количество животных;
количество животных;
![]() суточный выход навоза от одного животного,
кг;
суточный выход навоза от одного животного,
кг;
![]() количество подстилки, приходящееся на
дно животное, кг;
количество подстилки, приходящееся на
дно животное, кг;
![]() число уборок навоза в сутки.
число уборок навоза в сутки.
![]() кг
кг
![]() Н
Н
![]() ,
Н (2.3.8)
,
Н (2.3.8)
 где
где ![]() усилие от заклинивания навоза приходящееся
на один скребок, Н;
усилие от заклинивания навоза приходящееся
на один скребок, Н;
![]() количество скребков, перемещающих
навоз, на горизонтальном транспортере
в начале уборки.
количество скребков, перемещающих
навоз, на горизонтальном транспортере
в начале уборки.
![]() ,
(2.3.9)
,
(2.3.9)
где ![]() шаг скребков горизонтального транспортера,
м.
шаг скребков горизонтального транспортера,
м.
![]()
![]() Н
Н
![]() Н
Н
![]() Н
Н
Момент сопротивления при перемещении горизонтального транспортера на холостом ходу
![]() ,
,
![]() (2.3.10)
(2.3.10)
![]()
![]()
Максимальный момент сопротивления в начале уборки
![]() ,
,
![]() (2.3.11)
(2.3.11)
![]()
![]()
Усилие при движении наклонного транспортера с навозом
![]() ,
Н (2.3.12)
,
Н (2.3.12)
где ![]() усилие
от трения при перемещения транспортера
на холостом ходу, Н;
усилие
от трения при перемещения транспортера
на холостом ходу, Н;
![]() усилие от трения, связанное с перемещением
навоза, Н.
усилие от трения, связанное с перемещением
навоза, Н.
![]() ,
Н (2.3.13)
,
Н (2.3.13)
где α=300 − угол установки наклонного транспортера; cosα=0,87; sinα=0,5;
![]() длина цепи наклонного транспортера, м;
длина цепи наклонного транспортера, м;
![]() коэффициент трения цепи о желоб.
коэффициент трения цепи о желоб.
![]() Н
Н
![]() ,
Н (2.3.14)
,
Н (2.3.14)
где ![]() усилие сопротивления от трения навоза
о дно и стенки желоба, Н;
усилие сопротивления от трения навоза
о дно и стенки желоба, Н;
![]() усилие, связанное
с подъемом навоза по наклонной части,
Н;
усилие, связанное
с подъемом навоза по наклонной части,
Н;
![]() усилие, вызываемое
заклиниванием навоза между скребками
и желобом, Н;
усилие, вызываемое
заклиниванием навоза между скребками
и желобом, Н;
![]() ,
Н (2.3.15)
,
Н (2.3.15)
где ![]() коэффициент трения навоза о желоб;
коэффициент трения навоза о желоб;
![]() масса навоза,
находящаяся на наклонном транспортере,
кг;
масса навоза,
находящаяся на наклонном транспортере,
кг;
![]() ,
кг (2.3.16)
,
кг (2.3.16)
![]() кг
кг
![]() Н
Н
![]() ,
Н (2.3.17)
,
Н (2.3.17)
![]() Н
Н
![]() ,
Н (2.3.18)
,
Н (2.3.18)
где ![]() количество
скребков наклонного транспортера,
одновременно перемещающих навоз;
количество
скребков наклонного транспортера,
одновременно перемещающих навоз;
![]() ,
(2.3.19)
,
(2.3.19)
где ![]() шаг скребков наклонного транспортера,
м.
шаг скребков наклонного транспортера,
м.
![]()
![]() Н
Н
![]() Н
Н
![]() Н
Н
 Момент
сопротивления при перемещении наклонного
транспортера на холостом ходу
Момент
сопротивления при перемещении наклонного
транспортера на холостом ходу
![]() ,
,
![]() (2.3.20)
(2.3.20)
![]()
![]()
При перемещении навоза момент сопротивления
![]() ,
,
![]() (2.3.21)
(2.3.21)
![]()
![]()
Принимая допущение, что вся цепь и навоз, находящийся в канале или желобе, трогаются одновременно, определяем момент сопротивления при трогании транспортеров на холостом ходу:
![]() ,
,
![]() (2.3.22)
(2.3.22)
![]()
![]()
![]() ,
,
![]() (2.3.23)
(2.3.23)
![]() ,
,
![]()
Под нагрузкой:
![]() ,
,
![]() (2.3.24)
(2.3.24)
![]()
![]()
![]() ,
,
![]() (2.3.25)
(2.3.25)
![]()
![]()
Механические характеристики горизонтального и наклонного транспортера представлены на рисунке 2.3. Из него видно, что наибольший момент сопротивления будет при трогании транспортеров.
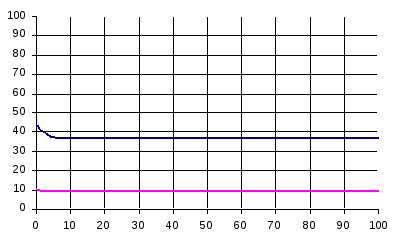
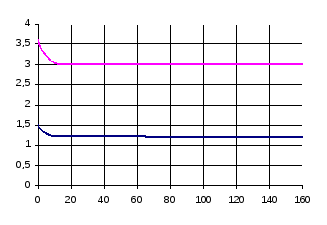
Рисунок 2.3 − Механические характеристики горизонтального (а) и наклонного (б) транспортеров