

MIKE / MAIN3
.DOC
Государственный комитет РФ по высшему образованию
Московский Институт Электронной Техники
(Технический Университет)
Факультет МПиТК
Кафедра ИПОВС
Пояснительная записка
к дипломному проекту на тему:
“Программа оптимизации работы тактового генератора в цифровых тактируемых схемах”.
Дипломант Рысев М.Г. ( __________ )
Руководитель проекта Глебов А.Л. ( __________ )
Консультант по специальной
части Глебов А.Л. ( __________ )
Консультант по технологической
части Глебов А.Л. ( __________ )
Консультант по организационно–экономической
части Костина Г.Д. ( __________ )
Консультант по производственно–экологической
части Константинова Л.А. ( __________ )
Москва, 1997 г.
Содержание
Введение. 3
Глава 1. 6
Постановка проблемы. 6
1.1. Введение. 6
1.2.Цифровые тактируемые схемы. 6
Введение.
С самого появления компьютеров, области их применения ширились, охватываю все новые и новые задачи. Одним из основных способов использования компьютеров является помощь в построении, изучении и производстве средств электронной промышленности. При этом с ускорением прогресса задачи, возлагаемые на "электронных помощников" становятся все сложнее и сложнее.
Интенсивное развитие электронной техники характеризуется внедрением в производство различных изделий микроэлектроники, что приводит к более тесной взаимосвязи чисто технических проблем со схемотехническими. Например, разработчики элементной базы радиоэлектронной аппаратуры должны учитывать схемотехнические вопросы создания аппаратуры, поскольку они изготавливают законченные в той или иной степени функциональные устройства. Разработчики же радиоэлектронной аппаратуры должны, с одной стороны, использовать существующую микроэлектронную элементную базу, а с другой стороны, выдвигать требования на разработку новых интегральных схем (ИС) с учетом возможностей интегральной технологии.
Сложность микроэлектронных систем, высокие требования к качеству функционирования и техническим характеристикам - быстродействию, надежности, точности - обуславливают трудоемкость их разработки. Дальнейший прогресс микроэлектроники требует развития и совершенствования методов и средств проектирования микроэлектронной аппаратуры и составляющих ее элементов - ИС.
Процесс проектирования ИС - многоэтапный процесс. На большинстве этапов осуществляется поиск наилучших или, по крайней мере, допустимых решений среди множества возможных. Такой поиск составляет содержание задач, называемых экстремальными задачами, или задачами оптимизации.
Данный дипломный проект не ставит своей целью создание программы оптимизацию параметров ИС на всех этапах проектирования схемы. Мы рассмотрим этап после разработки логики и создания принципиальной схемы ИС. На этом этапе становится задача выбора частоты тактового генератора, которая определяет скорость работы всей схемы.
Пояснительная записка к дипломному проекту состоит из 6-ти глав, заключения и приложений.
-
Глава 1 содержит описание проблемы, а также ее анализ;
-
В главе 2 выбирается алгоритм оптимизации работы тактового генератора;
-
Глава 3 является конструкторской части и включает в себя проработку структур данных, разработку программы и другое;
-
Глава 4 содержит технологическую часть - описываются технологии программирования с использованием средств быстрой разработки приложений;
-
Глава 5 - организационно‑экономическая часть, где производится сегментация рынка программы оптимизации работы тактового генератора;
-
В главе 6 рассматриваются вопросы эргономики и их решение для создания комфортных условий труда программиста;
Также пояснительная записка содержит заключительную часть, подводящую итоги выполненной работы и приложения, содержащие тексты программы и различные схемы и диаграммы.
Глава 1.
Постановка проблемы.
-
Введение.
В логическом проектировании цифровых схем возникает вопрос выбора тактовой частоты генератора импульсов. Этот выбор важен для дальнейших этапов создания ИС, т.к. именно от выбора тактовой частоты тактового генератора (в дальнейшем - ТГ) при известной топологии схемы и зависит скорость работы. Чем выше частота: тем быстрее схема. Возникает желание повышать частоту тактового сигнала бесконечно долго (на самом деле современная техника дает возможность создания ТГ с частотой выходного сигнала, измеряемого гигагерцами). Но зачастую существует множество факторов, которые не позволяют безгранично пользоваться плодами прогресса. Например многие полупроводниковые элементы не могут срабатывать на сигнал с такой частотой. Или логика и топология схемы не позволяет использовать такую частоту.
Соответственно возникает проблема выбора тактовой частоты ТГ, на которой цифровая схема может работать стабильно. Для понимания термина "стабильность" необходимо рассмотреть структуру цифровых схем (ЦС).
1.2.Цифровые тактируемые схемы.
При определенном приближении можно сказать, что каждая цифровая схема состоит из ячеек памяти и комбинационных схем, их соединяющих. В то время как комбинационные схемы выполняю задачи коммутации между ячейками (или элементами) памяти, сами эти элементы служат для хранения цифровой информации. Под коммутацией понимается любая передача и конвертация данных. Такой конвертацией может быть любое преобразование как одного так и нескольких входящих сигналов в один или несколько выходящих.
В цифровой схемах необходимо различить два вида сигнала: сигнал данных и тактовый сигнал. Сигнал данных является информационным для ЦС - он определяет всю информацию, которая подается на вход цифровой схемы, течет по комбинационным схемам, хранится в элементах памяти и выдается на выходе ЦС. Тактовый сигнал является управляющим - все (или почти все) цифровые элементы работают согласно тактовому сигналу f, который имеет следующий вид:

Здесь:
"0", "1" - уровни отсутствия сигнала и его наличия
соответственно;
t 1 - передний фронт импульса. Определяет время, когда
тактовый сигнал возрастает;
t 2 - задний фронт импульса. Определяет время, когда
тактовый сигнал убывает;
T c - период сигнала. Определяет время между соседними
одноименными фронтами.
Дополнительно надо ввести такие параметры, которые не отражены на этом графике. Это:
f
с
- частота сигнала. Определяется
как
![]()
c
- Скважность сигнала:
![]()
Сигналы с тактового генератора подаются на специальные входы элементов цифровой схемы. При каждый элемент в зависимости от своего состояния, функционирования и вида фронта сигнала (переднего или заднего) совершает определенные действия.
Как мы уже говорили, цифровая схема состоит из элементов памяти и комбинационных схем. Элементы памяти бывают двух видов - лэтчи (latches) и флип-флопы (flip-flops). Различие между ними заключается в следующем: флип-флопы не различает фронты сигнала, лэтч же рассматривает фронты тактового сигнала по разному - один из фронтов является отпирающим (enabling edge) сигналом, другой же - запирающим (latching edge).
Рассмотрим упрощенную схему работы элементов памяти. При приходе отпирающего сигнала лэтч начинает работать как простой проводник - информация на выходе соответствует информации на входе. Затем приходит запирающий сигнал и лэтч начинает работать как ячейка памяти - он запоминает информацию, которая была на его входе до запирающего сигнала и постоянно держит ее на выходе. Так происходит до прихода следующего отпирающего сигнала. Флип-флоп запоминает информацию по приходу фронта тактового сигнала и сохраняет ее до прихода следующего аналогичного.
На самом деле сложность заключается в том, что элементы памяти инертны - для получения правильного прохождения сигнала должны выполняться различные условия:
-
Информационный сигнал должен установится на входе элемента памяти за определенное время до прихода тактового сигнала. Это время называется установочным временем (setup time). Обозначим его как S i.
-
Также информация после прихода тактового сигнала должна удерживаться на входе какое-то время для того, чтобы элемент памяти смог зафиксировать данные. Это время называется временем удержания (hold time). Мы его обозначим как H i.
Через di и Di будем обозначать минимальное и максимальное время прохождения информационного сигнала через элемент памяти. Это время обуславливается внутренними задержками. И, наконец, pi - номер фазы тактового сигнала, используемой для управления элементом памяти.
Сигнал, приходящий на элемент i, обладает двумя параметрами - ранним и поздним временем прихода: ai и Ai. Эти времена определяют время начала установки данных и время окончательного становления. Соответственно, существуют подобные времена и на выходе - di и Di.
В этих терминах мы теперь можем определить задачу оптимизации:
-
Для лэтчей:


-
Для флип-флопов:
![]()
Для понимания сути задачи оптимизации, на рисунке 2 показаны три варианта взаиморасположения событий информационного и тактового сигналов на временной оси. Приходящий сигнал показан под буквой a), сигнал на выходе для лэтча - b) и, наконец, сигнал на выходе для флип-флопа - c).


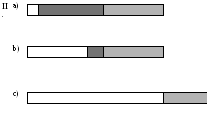
Условные обозначения:






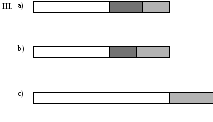
Из условий корректности получения информации следуют требования:
![]()
![]()
Данные условия проиллюстрированы на рисунке 3.

























