

билеты_ЭМ / 41.Регулирование скорости изменением числа пар полюсов
.doc41) Регулирование скорости изменением числа пар полюсов.
Обеспечивается благодаря изменению частоты вращения магнитного поля статора.
Как следует из формулы (7), при неизменной частоте в питающей сети частота вращения магнитного поля и определяемая ею частота вращения ротора изменяются обратно пропорционально числу полюсов. Так как число полюсов, фиксированное ступенями, может быть равно 2, 4, 6, 8, 10 и т. д., что при частоте в питающей сети, равной 60 Гц, соответствует синхронной частоте вращения 3000, 1500, 1000, 750, 600 об/мин и т. д., то указанным способом может быть обеспечено только ступенчатое регулирование.
Изменение числа пар полюсов обычно достигается следующими способами:
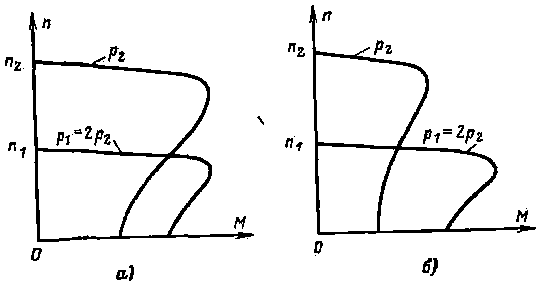
1. На статоре двигателя укладываются две не связанные между собой обмотки, имеющие разное число пар полюсов, например p1 и р2. При подключении одной из обмоток к сети переменного тока, например, с числом полюсов р2 двигатель будет иметь синхронную частоту вращения, соответствующую данному числу полюсов (см. рис. 25, а):
|
n2 = |
60f |
. |
|
p2 |
Другая обмотка при этом обесточена. При необходимости получения другой частоты вращения n1 обмотка с числом полюсов р2 отключается и включается с числом полюсов p1. Такие асинхронные двигатели получили название двухобмоточных.
2. На статоре укладывается одна обмотка, допускающая переключение на разное число полюсов. Наиболее широко распространены две схемы переключения статорной обмотки двухскоростных двигателей: с треугольника на двойную звезду Δ/YY и со звезды на двойную звезду Y/YY (звезду с двумя параллельными ветвями).
Схемы соединения обмоток Δ/YY применяются для получения примерно одинакового вращающего момента при обеих частотах вращения (рис. 25,а). Такие схемы применяются, например, у асинхронных двигателей привода компрессоров, металлорежущих станков и др. Схемы соединения обмоток Y/YY используются для приводов вентиляторов (рис. 25,б).
|
|
|
Рис. 25. Механические характеристики при регулировании частоты вращения асинхронных двигателей изменением числа пар полюсов при переключении статорной обмотки. а — треугольник (число пар полюсов 2p = p1 )—двойная звезда (2р = р2 ); б —звезда (2p = p1 ) — двойная звезда (2р = р2 ). |
Кроме рассмотренных вариантов двухскоростных асинхронных двигателей нашли применение трехскоростные и четырехскоростные двигатели. В трехскоростных двигателях размещаются одна переключаемая и одна непереключаемая обмотки, а в четырехскоростных две переключаемые обмотки, позволяющие получить четыре синхронные частоты вращения, например 3000/1500/1000/500 об/мин.
Двигатели с переключением числа пар полюсов, как правило, имеют короткозамкнутый ротор с обмоткой типа беличьей клетки. Такой ротор обеспечивает возможность работы без дополнительных пересоединений в его цепи. В случае фазного ротора в многоскоростных двигателях потребовалось бы производить переключения одновременно на статоре и роторе, что усложнило бы конструкцию ротора и эксплуатацию таких машин.
Электродвигатели с короткозамкнутым ротором могут иметь ряд специфических ненормальностей из-за неправильного соотношения числа пазов статора Z1, ротора Z2 и числа полюсов 2р.
Ненормальности заключаются в том, что двигатель может «прилипать», т. е. не приходить во вращение при подключении к сети, или «застревать», т. е., начавши вращаться, останавливается на некоторой скорости, или при вращении сильно гудит.
Во избежание указанных явлений должны быть выдержаны следующие соотношения:
|
Z2 ≠ Z1, Z2 ≠ 0,5Z1, Z2 ≠ 2Z1, Z2 ≠ 6pk, Z2 ≠ 6pk + 2p, Z2 ≠ Z1 ± p, |
Z2 = Z1 + 2p, Z2 = 0,5Z1 ± p, Z2 = 2Z1 + 2p, Z2 = 6pk ±1, Z2 = 6pk±(2p±1), |
где k — любое целое число от одного до четырех. Здесь же следует заметить, что изменение числа полюсов может иметь место не только при регулировании частоты вращения способом изменения его полюсности, но и при ремонте, связанном с изменением номинальной частоты вращения.
К положительным показателям многоскоростных асинхронных двигателей следует отнести экономичность регулирования частоты вращения ротора. Недостатком данного способа регулирования является указанная выше невозможность плавного изменения частоты вращения.