

Sherbakov_Voprosy_k_GOSam_v_1_21_02_2012(1)
.docxЭлектрические машины
|
№ ? |
Вопрос |
Ответ |
||||||||||||
|
1.
|
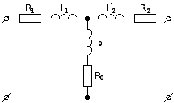
Схема замещения трансформатора(Тр)? |
|
||||||||||||
|
2. |
Значения его параметров?
|
|
||||||||||||
|
3. |
Отличия приведённых значений от реальных значений? |
где
|
||||||||||||
|
4. |
Формула КПД Тр? |
где
|
||||||||||||
|
5. |
При каком значении нагрузки максимальное КПД у Тр? |
При
|
||||||||||||
|
6 |
Параллельная работа Тр( 3 условия)? |
- Трансформаторы должны обладать одинаковыми коэффициентами трансформации; - Трансформаторы должны иметь одну группу соединения обмоток; - Напряжения короткого замыкания и их составляющие должны быть одинаковыми. |
||||||||||||
|
7 |
Трансформаторы напряжения и тока(их различия и назначения)? |
Измерительный трансформа́тор то́ка — трансформатор, предназначенный для преобразования тока до значения, удобного для измерения. Первичная обмотка трансформатора тока включается последовательно в цепь с измеряемым переменным током, а во вторичную включаются измерительные приборы.
|
||||||||||||
|
8 |
Особенности конструкции магнитопровода трансформатора и машин переменного тока в целом? |
Магнитопроводом называется деталь или комплект деталей, предназначенных для прохождения с определенными потерями магнитного потока, возбуждаемого электрическим током, протекающим в обмотках устройств, в состав которых входит магнитопровод. Магнитопроводы являются составными частями схемотехнических элементов РЭА: трансформаторов, дросселей, пускателей, контакторов, магнитных головок, фильтров, контуров, запоминающих устройств, электрических машин: генераторов, электродвигателей. Магнитопроводы разделяют на три группы:
Также по конструктивному исполнению магнитопроводы делятся на 2 группы:
Зубчатые магнитопроводы — это магнитопроводы с ярко выраженной зубчатостью. Для таких магнитопроводов характерно существенное влияние формы пазов на магнитную проницаемость зазора. С целью получения определённой формы магнитного поля зубцам придаётся особая форма. Магнитопровод изготавливается из материала с высокой магнитной проницаемостью (как правило, из электротехнической стали). Гладкие магнитопроводы — это магнитопроводы со слабо выраженной зубчатостью. |
||||||||||||
|
9 |
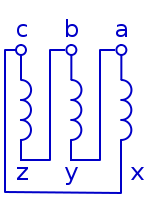
Номер группы соединения обмоток трансформатора и с чем это связано? |
Сдвиг фаз между ЭДС первичной и вторичной обмоток принято выражать группой соединений. Для описания напряжения смещения между первичной и вторичной, или первичной и третичной обмотками, традиционно используется пример с циферблатом часов. Так как этот сдвиг фаз может изменяться от 0° до 360°,а кратность сдвига составляет 30°, то для обозначения группы соединений выбирается ряд чисел от 1 до 12, в котором каждая единица соответствует углу сдвига в 30°. Одна фаза первичной указывает на 12, а соответствующая фаза другой стороны указывает на другую цифру циферблата. Наиболее часто используемая комбинация Yd11 означает, например, наличие 30º смещения нейтрали между напряжениями двух сторон
Примечание: на диаграмме зелёным цветом обозначены вектора обмотки ВН, синим — НН, красным смещение вектора AB. В железнодорожных трансформаторах также встречается группа соединений «разомкнутый треугольник — неполная звезда». |
||||||||||||
|
10 |
Механическая( |
Механическая характеристика — это зависимость угловой скорости вращения вала от электромагнитного момента M (или от момента сопротивления Mc). Механические характеристики являются очень удобным и полезным инструментом при анализе статических и динамических режимов электропривода. Электромеханическая характеристика — это зависимость угловой скорости вращения вала ω от тока I.
|
||||||||||||
|
11 |
Внешний вид и формулы к ним? |
ДПТ независимого (параллельного) возбуждения: Ур-е
напряжений:
или
приняв
Ток
якоря:
Электромагнитный
момент:
Момент навалу двигателя, т.е. полезный момент:
Частота
вращения якоря ДПТ:
|
||||||||||||
|
12 |
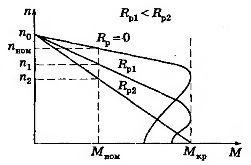
Как изменяются эти характеристики при регулировании(при изменении одного из параметров)? |
|
||||||||||||
|
13 |
Формула связывающая частоту вырабатываемого напряжения синхронного генератора(СГ) со скоростью его вращения? |
где
|
||||||||||||
|
14 |
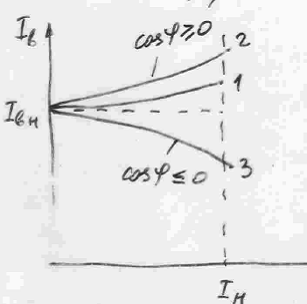
Характеристики СГ(хар-ки ХХ, внешняя, у-образная, регулировачная)? |
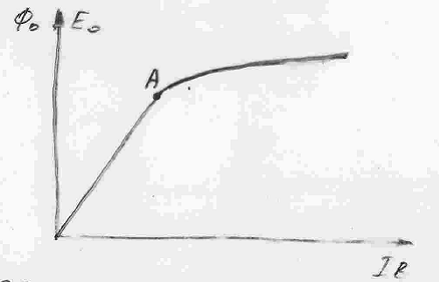
Характеристика холостого хода. Это зависимость ЭДС генератора Eо на холостом ходу от тока возбуждения Iв. Она связана с кривой намагничивания стали и напоминает её по форме. На холостом ходу синхронного генератора его ЭДС создаётся только главными магнитными потоками, поэтому ЭДС пропорциональна Φo, а он, в свою очередь, пропорционален Bo, т.е. индукции в статоре, поэтому зависимость Eo = f (Iв) подобна зависимости Bo = f (Iв). Номинальный режим возбуждения генератора выбирают в области изгиба кривой (точка А). Внешняя характеристика.
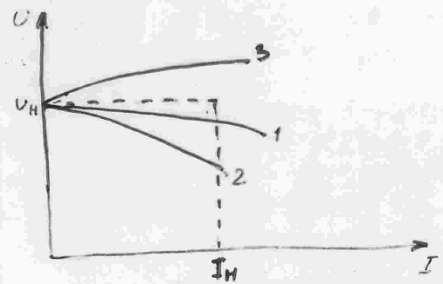
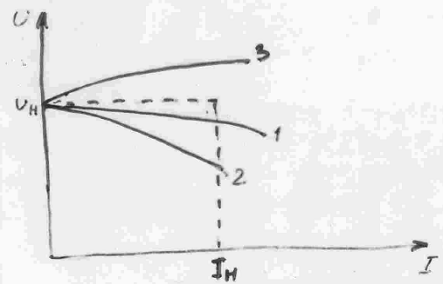
Внешняя характеристика синхронного генератора характеризует его электрические свойства и представляет собой зависимость напряжения на зажимах генератора U от его тока нагрузки I при постоянных значениях коэффициента мощности cosφ, скорости вращения ротора n и тока возбуждения Iв. Чтобы экспериментально получить внешнюю характеристику, нужно сначала нагрузить генератор до номинального тока Iн при номинальном напряжении Uн на зажимах генератора, которое устанавливается путём регулировки тока возбуждения. Затем, поддерживая ток возбуждения и частоту вращения постоянными, постепенно уменьшают ток нагрузки до нуля. Внешние характеристики могут иметь спад (кривая 2) или подъём (кривая 3) в зависимости от характеристики нагрузки и действия реакции якоря. Номинальный режим нагрузки выбирают так, чтобы при cosφ = 0,8 изменение напряжения ΔU не превышало 35 – 45% от номинального (кривая 1) Внешняя характеристика.
Внешняя характеристика синхронного генератора характеризует его электрические свойства и представляет собой зависимость напряжения на зажимах генератора U от его тока нагрузки I при постоянных значениях коэффициента мощности cosφ, скорости вращения ротора n и тока возбуждения Iв. Чтобы экспериментально получить внешнюю характеристику, нужно сначала нагрузить генератор до номинального тока Iн при номинальном напряжении Uн на зажимах генератора, которое устанавливается путём регулировки тока возбуждения. Затем, поддерживая ток возбуждения и частоту вращения постоянными, постепенно уменьшают ток нагрузки до нуля. Внешние характеристики могут иметь спад (кривая 2) или подъём (кривая 3) в зависимости от характеристики нагрузки и действия реакции якоря. Номинальный режим нагрузки выбирают так, чтобы при cosφ = 0,8 изменение напряжения ΔU не превышало 35 – 45% от номинального (кривая 1). Регулировочная характеристика. Представляет собой зависимость тока возбуждения генератора Iв от тока нагрузки I при U= Uн=const, n=nн=const, cosφ = const. Эта характеристика показывает, как выбирать ток возбуждения, при котором напряжение на зажимах генератора оставалось бы постоянным при изменении нагрузки.
Для получения регулировочной характеристики нужно сначала включить генератор и сообщить его ротору номинальную скорость вращения при холостом ходе, а потом путём изменения тока возбуждения добиться получения номинального напряжения Uн. Далее постепенно увеличивают ток нагрузки и снимают характеристику, добиваясь в каждой точке напряжения на зажимах U = Uн = const, регулируя ток возбуждения. Мы видим регулировочные характеристики при различных cosφ. Кривая 2 – активно-индуктивная нагрузка (ток Iв нужно уменьшить). Кривая 3 – активно-ёмкостная нагрузка (ток Iв нужно увеличить). Кривая 1 – оптимальный режим. Регулировочные характеристики имеют важное значение, т.к. они определяют пределы изменения тока возбуждения для поддержания номинального напряжения при изменении нагрузки. Представляет собой зависимость тока возбуждения генератора Iв от тока нагрузки I при U= Uн=const, n=nн=const, cosφ = const. Эта характеристика показывает, как выбирать ток возбуждения, при котором напряжение на зажимах генератора оставалось бы постоянным при изменении нагрузки.
Для получения регулировочной характеристики нужно сначала включить генератор и сообщить его ротору номинальную скорость вращения при холостом ходе, а потом путём изменения тока возбуждения добиться получения номинального напряжения Uн. Далее постепенно увеличивают ток нагрузки и снимают характеристику, добиваясь в каждой точке напряжения на зажимах U = Uн = const, регулируя ток возбуждения. Мы видим регулировочные характеристики при различных cosφ. Кривая 2 – активно-индуктивная нагрузка (ток Iв нужно уменьшить). Кривая 3 – активно-ёмкостная нагрузка (ток Iв нужно увеличить). Кривая 1 – оптимальный режим. Регулировочные характеристики имеют важное значение, т.к. они определяют пределы изменения тока возбуждения для поддержания номинального напряжения при изменении нагрузки.
|
||||||||||||
|
15 |
Как сказывается на характеристике учёт насыщения? |
Насыщение - нарушение линейности |
||||||||||||
|
16 |
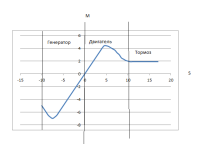
Что такое скольжение для АД? |
где
Если 0<S<1 –двигательный режим; S<0 – генераторный режим; S>0 – режим динамического торможения. |
||||||||||||
|
17 |
Понятие якорь и индуктор? |
Основными частями синхронной машины являются якорь и индуктор. Наиболее частым исполнением является такое исполнение, при котором якорь располагается на статоре, а на отделённом от него воздушным зазором роторе находится индуктор. Индуктор состоит из полюсов — электромагнитов постоянного тока[1] или постоянных магнитов (в микромашинах). Якорь представляет собой одну или несколько обмоток переменного тока. В двигателях токи, подаваемые в якорь, создают вращающееся магнитное поле, которое сцепляется с полем индуктора, и таким образом происходит преобразование энергии. ********** Индуктором называют часть машины, в которой создается первичное магнитное поле. Якорем называют часть машины, в которой индуцируется ЭДС. |
||||||||||||
|
18 |
Система возбуждения и её назначение в СМ? |
Система возбуждения обеспечивает:
|
||||||||||||
|
19 |
Как изменяется активная мощность СГ работающего параллельно с сетью, если увеличить его ток возбуждения, а всё остальное оставить без изменения? |
С
изменением тока происходит изменение
и угла
|
||||||||||||
 -
активное
сопротивление первичной обмотки;
-
активное
сопротивление первичной обмотки; -
сопротивление рассеяния первичной
обмотки;
-
сопротивление рассеяния первичной
обмотки; -
приведенное
активное сопротивление вторичной
обмотки;
-
приведенное
активное сопротивление вторичной
обмотки; -
приведенное сопротивление рассеяния
вторичной обмотки;
-
приведенное сопротивление рассеяния
вторичной обмотки; -
активное
сопротивление ветви холостого хода;
-
активное
сопротивление ветви холостого хода; -
реактивное
сопротивление ветви холостого хода;
-
реактивное
сопротивление ветви холостого хода;

 – коэффициент приведения(трансформации)
– коэффициент приведения(трансформации)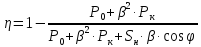


 – потери активной мощности при холостом
ходе;
– потери активной мощности при холостом
ходе; – потери
активной мощности при коротком
замыкании;
– потери
активной мощности при коротком
замыкании; – наверное
номинальная мощность Тр;
– наверное
номинальная мощность Тр; – проходящий
ток во вторичной обмотке;
– проходящий
ток во вторичной обмотке; –
справочное
значение Тр;
–
справочное
значение Тр; – нагрузочный
коэффициент Тр.
– нагрузочный
коэффициент Тр. КПД Тр. максимально.
КПД Тр. максимально.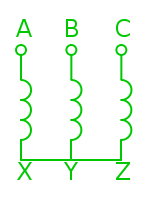

 )
и электромеханическая(
)
и электромеханическая( )
характеристика двигателя для МПТ?
)
характеристика двигателя для МПТ?

 ,
[В]
,
[В]
 ,
[В]
,
[В] ,
[А]
,
[А] ,
[Н∙м]
,
[Н∙м] ,
[Н∙м]
,
[Н∙м] – момент
холостого хода;
– момент
холостого хода; – полезная
мощность двигателя;
– полезная
мощность двигателя;
 – КПД
двигателя;
– КПД
двигателя;
 ,[об/мин]
,[об/мин]
 ,[рад/с]
,[рад/с]
 ,[обороты/с]
,[обороты/с] ;
; – частота
сети, = 50 Гц;
– частота
сети, = 50 Гц; – кол-во
пар полюсов;
– кол-во
пар полюсов;




 – скорость вращения ротора;
– скорость вращения ротора; -
синхронная скорость.
-
синхронная скорость. ,
а следовательно, коэффициента мощности
cos
φ
генератора.
,
а следовательно, коэффициента мощности
cos
φ
генератора.
Эл.привод.
|
№ ? |
Вопрос |
Ответ |
|
20 |
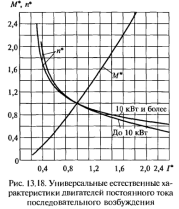
Способы регулирования скорости вращения вала у АД,СД, ДПТ и мех. Хар-ки? |
АД
СГ
ДПТ |
|
21 |
Мероприятия предназначенные для ограничения пусковых токов эл.двигателей? |
Подключение по схеме Звезда-Треугольник |
|
22 |
Пуск СД? |
Самый простой и распространенный пуск синхронного двигателя – асинхронный пуск. Пуск двигателя состоит из двух этапов: первый этап – асинхронный набор скорости при отсутствии возбуждения постоянным током и второй этап – втягивание ротора в синхронизм после включения постоянного тока возбуждения. |
|
23 |
Включение обмотки возбуждения СД на разрядные сопротивления при пуске? |
Где
Если при пуске СД Мс>0,4Mн или время разбега его превышает время самовозбуждения возбудителя , то применяют прямой пуск с разрядным резистором R1 в обмотке возбуждения ротора СД, как это показано на рис. 5.7, б. Разрядный резистор ограничивает ток возбуждения при пуске, улучшая при этом механическую характеристику СД. Разрядный резистор R1 закорачивают при разбеге СД до подсинхронной скорости. Этот резистор обеспечивает также ускоренное гашение поля СД после его отключения от сети (уменьшается постоянная времени контура обмотки возбуждения СД). Величина R1выбирается порядка (8-10), то есть существенно больше сопротивления обмотки возбуждения ротора СД. В схемах подачи возбуждения в ротор СД предусматривается возможность форсирования тока возбуждения с помощью резистора, шунтируемого контактами КФ (см. рис. 5.7) . При увеличении тока возбуждения возбудителя и тока возбуждения синхронного двигателя М увеличивается Э.Д.С. СД, чем и достигается кратковременное повышение развиваемого им максимального электромагнитного момента (см.раздел. 5.2). Форсировка возбуждения необходима также при снижении напряжения питающей СД сети. |
|
24 |
Режим динамического торможения двигателя? |
Динамическое торможение электропривода, режим работы электропривода, при котором в результате взаимодействия постоянного магнитного потока в электродвигателе с током замкнутого электропроводящего контура создаётся тормозное усилие. В электроприводе с электродвигателем постоянного тока Динамическое торможение осуществляется замыканием обмотки якоря накоротко или через добавочное активное сопротивление при включённой обмотке возбуждения. В электроприводе с асинхронным электродвигателем Динамическое торможение достигается пропусканием по обмотке статора постоянного тока, при этом обмотка ротора образует замкнутый контур. Динамическое торможение синхронного электродвигателя выполняется при включённой обмотке возбуждения и замыкании накоротко или через добавочное активное сопротивление обмотки статора. |
|
25 |
Активные и реактивные силы и моменты? |
По
характеру действия моменты нагрузки
Реактивный момент(зависимость 6 на рис 2.6.б) создаётся в основном силами трения, он всегда противодействует движению и по этому изменяет свой знак с изменением направления скорости движения тела. |
|
26 |
Что произойдёт с приводом, если к нему приложены активные силы или моменты? |
Активные силы(к примеру, сила тяжести) – будет раскручивать двигатель в обратную сторону после остановки; Реактивные силы – силы, противовоздействующие силе воздействующей на предмет. |
|
27 |
Что такое синхронная скорость вращения и как она связана с частотой сети? |
1) частота вращения (угловая скорость) электрич. машины, находящаяся в строго пост. отношении к частоте питающей сети. Термин применяется также для обозначения частоты вращения (угловой скорости) вращающегося первичного магнитного поля. 2) Частота вращения данного ротора, в точности равная частоте вращения магнитного поля статора. |
|
28 |
Реверс двигателей? Схемы осуществления? |
|
|
29 |
Частотный способ регулирования? Частотный пуск? |
Принцип частотного метода регулирования скорости асинхронного двигателя заключается в том, что, изменяя частоту питающего напряжения, можно в соответствии с выражением при неизменном числе пар полюсов р изменять угловую скорость nо магнитного поля статора. Этот способ обеспечивает плавное регулирование скорости в широком диапазоне, а механические характеристики обладают высокой жесткостью. Для получения высоких энергетических показателей асинхронных двигателей (коэффициентов мощности, полезного действия, перегрузочной способности) необходимо одновременно с частотой изменять и подводимое напряжение. Закон изменения напряжения зависит от характера момента нагрузки
|
|
30 |
Соотношение между частотой сети и величиной напряжения при частотном регулировании? |
питающее напряжение следует изменять прямо пропорционально его частоте. При этом мощность двигателя увеличивается прямо пропорционально возрастанию частоты вращения. |
|
31 |
Участки на мех. Хар-ке, соответсвующие двигательному и генираторному режиму работы у любых эл.мышин? |
|
|
32 |
Жёсткость и её изменение при регулировании? |
Жёсткость – это наклон на графике.
где
Лучше выбирать регулирование при котором жёсткость не меняется. |
|
33 |
Режим работы привода? |
Кратковерменный, повторно-кратковременный, и т.д. |
 Мех
хар-ка
Мех
хар-ка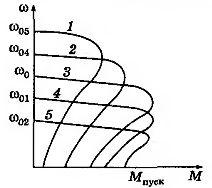 мех
хар-ка
мех
хар-ка
 ,
, – сопротивление обмотки возбуждения;
– сопротивление обмотки возбуждения; – разрядное сопротивление.
– разрядное сопротивление.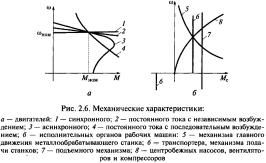
 подразделяются на активные и реактивные.
Активный
момент(зависимость
7 на рис 2.6.б) имеет постоянное, не
зависящее от скорости направление
своего действия. Такие моменты создаются
так называемыми потенциальными силами,
к которым относится сила притяжения
земли, сила упругой деформации и т.д.
подразделяются на активные и реактивные.
Активный
момент(зависимость
7 на рис 2.6.б) имеет постоянное, не
зависящее от скорости направление
своего действия. Такие моменты создаются
так называемыми потенциальными силами,
к которым относится сила притяжения
земли, сила упругой деформации и т.д.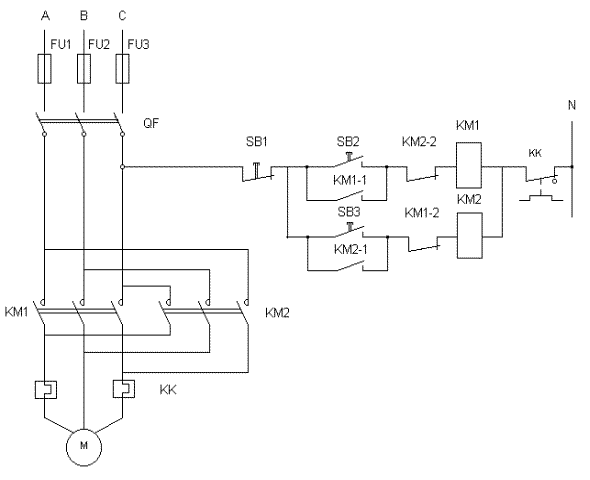
 ,
, – разность моментов;
– разность моментов; разность
угловой скорости вращения ротора.
разность
угловой скорости вращения ротора.