

2. Программирование
Возможности программирования позволяют приспособить цифровые электроприводы для выполнения конкретных задач пользователя. Базой языка программирования систем управления электроприводами являются обычно либо Basic либо С++. К сожалению, в отличие от стандартных языков ПЛК, определяемых международным стандартом
IEC61131-3, общепринятых языков программирования для контроллеров управления электроприводами не существует. Однако в большинстве случаев эти языки программирования контроллеров напоминают Список Инструкций (Instruction List IL) или Структурированный Текст (Structured Text ST) стандартных языков ПЛК.
Структура программы содержит набор подпрограмм (task или sequence), предназначенных для выполнения отдельных операций по управлению движением. Контроллеры обычно позволяют выполнять одновременно (multitasking) несколько (до 10 и более подпрограмм). Программирование производится в специальной среде, позволяющей отредактировать, ввести комментарии, компилировать и выполнить программу (с введением контрольных точек или пошагово).
Команды контроллера могут быть подразделены на следующие основные типы: параметры движения, логическое управление программой, параметры регулятора положения, управление входами/выходами, конфигурирование и форматирование, диагностика (состояние и ошибки), выполнение математических функций, а также автоматически выполняемые программы.
Новым направлением, отличающимся удобством и простотой для пользователя, является программирование одноосевых контроллеров типа Xenus фирмы Copley Controls. Составление программы состоит не в написании последовательности инструкций, а в в конфигурировании подпрограмм - выборе самих инструкций и ее параметров. Такой контроллер предлагает инструкции следующих типов (см. рис. 2): ожидание (Wait), установки (Settings), типы движения (Motion, Mode), фильтры (Filters), установки
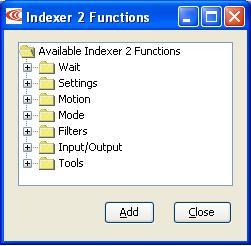
Рис. 2. Список инструкций контроллера Xenus, Copley Controls
входов/выходов (Input/Output) и инструменты (Tool).
Например, подпрограмма для выхода в нулевую координату (Homing) предоставляет различные варианты конфигурирования: при наезде на механический упор (Hardstop), по входу Home, по входам двух крайних конечных выключателей, а также в различных сочетаниях конечных выключателей с импульсом "Индекс" энкодера. После выбора типа подпрограммы остается выбрать ее параметры – см. рис. 3 для подпрограммы выхода в нулевую координату (Homing).
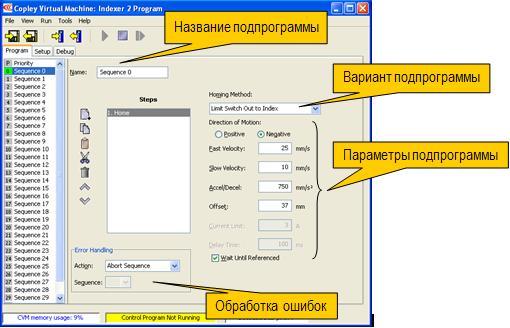
Рис. 3. Окно подпрограммы выхода в нулевую координату (Homing) для одноосевого контроллера Indexer, Copley Controls
3. Разработка алгоритмов пользователя на основе интерфейса пользователя
Поставляемый вместе с контроллером графический интерфейс предоставляет пользователю широкие функциональные возможности по организации стандартных режимов движения, конфигурирования, ручной/автоматизированной настройки, сбора и обработки данных, диагностики и т.д. Отметим, что наряду с постоянным совершенствованием средств автоматизированной/ручной настройки, сбора и обработки данных (включая двух и более канальный осциллограф) [1], средства частотного анализа [2], принципиально новым направлением усовершенствования систем управления электроприводами является возможность разработки алгоритмов пользователя практически неограниченной сложности.
Например, разработчикам контроллеров фирмы Mega-F удалось соединить удобство анализа и синтеза систем управления с простотой сопряжения c реальным объектом управления на базе средства разработки алгоритмов Wizard for Algorithm (WizAlg) представляющего собой графическую среду, напоминающую Simulink и позволяющую при помощи процедуры “drag-and-drop” разработать практически любой алгоритм пользователя.
В библиотеку блоков WizAlg (см. рис. 4) входят следующие основные группы блоков: линейные, нелинейные, интеграторы / дифференциаторы, фильтры, математических операций, логики, а также генератор сигналов. Предусмотрена возможность создания блоков пользователя (custom block) и подсистем более высокого уровня иерархии.
С помощью WizAlg могут быть разработаны, например, алгоритм компенсации зубцового эффекта двигателей с железным сердечником (iron core motor), улучшающий равномерность перемещения, являющейся определяющим фактором для систем сканирования.
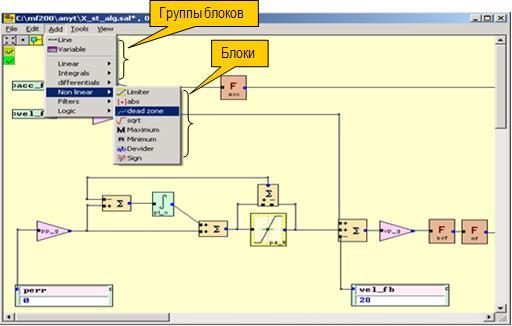
Рис. 4. Среда разработки алгоритмов WizAlg (Mega-F)
Сетевые шины предоставляют разработчикам систем управления многокоординатными прецизионными электроприводами возможность выбора конфигурации систем управления электроприводами в зависимости от степени координации и синхронизации осей управления между собой.
Возможности программирования позволяет приспособить цифровые электроприводы для выполнения конкретных задач пользователя. Составление программы с помощью выбора инструкций и ее параметров позволяет существенно облегчить процесс программирования для пользователя.
Реализация пользователем алгоритмов управления практически неограниченной сложности дает возможность повысить качественные показатели электропривода и тем самым технологического оборудования в целом.
Приведенный обзор основных тенденций развития предназначен помочь выбору концепции систем управления многокоординатными прецизионными электроприводами станка/технологической машины, особенно для практических приложений, требующих высоких быстродействия и уровня синхронизации сервоосей.