7 Математическое описание элементов и систем управления
Для проведения теоретических исследований САР и её отдельных элементов необходимо иметь уравнения, описывающие их поведение при изменяющихся внешних воздействиях. Эти уравнения представляют собой выраженные в математической форме соотношения, связывающие входные и выходные сигналы и воздействия.
С целью упрощения получения математических соотношений обычно вводят следующие допущения:
- САР и ее элементы обладают свойством стационарности;
- элементы САР являются линейными;
протекающие процессы являются непрерывными функциями времени при выполнении нулевых начальных условий.
В обобщенном виде САР представлена на рис. 2.1.
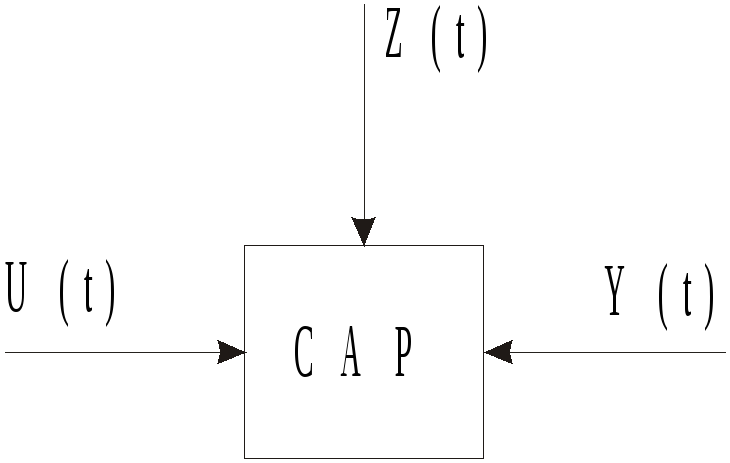
В общем случае действие непрерывной линейной САР описывается неоднородным дифференциальным уравнением следующего вида:
![]()
(2.1)
где a, b, c - постоянные коэффициенты, зависящие от параметров системы.
В![]() ведем
оператор дифференцирования
ведем
оператор дифференцирования![]() . Тогда уравнение (2.1) может быть
представлено в операторном виде:
. Тогда уравнение (2.1) может быть
представлено в операторном виде:
(2.2)
В выражении (2.2) полином, стоящий при выходном параметре Y, называется собственным оператором и обозначается Q(p). Полиномы при воздействиях Х и Z называются соответственно оператором управляющего воздействия и оператором возмущающего воздействия. Оператор управляющего воздействия обозначим R1(p), а оператор возмущающего воздействия обозначим R2(p). С учётом введенных обозначений уравнение (2.2) примет вид:
![]()
(2.3)
Е![]() сли
рассматривается только установившейся
режим, то уравнение (2.2) примет вид:
сли
рассматривается только установившейся
режим, то уравнение (2.2) примет вид:
(2.4)
Таким образом, уравнение (2.2) описывает как динамику, так и статику САР, а уравнение (2.4) описывает только статику.
В тех случаях, когда система или её составной элемент описывается дифференциальным уравнением не выше 2-го порядка, применяется стандартная форма записи уравнения.
Например, имеем САР, содержащую один вход X и один выход Y, которая описывается уравнением:
![]()
(2.5)
Л![]() евую
и правую часть уравнения (2.5) разделим
на коэффициентa2:
евую
и правую часть уравнения (2.5) разделим
на коэффициентa2:
(2.6)
![]()
Введем
обозначения
![]()
Т![]() огда
уравнение (2.6) примет вид:
огда
уравнение (2.6) примет вид:
(2.7)
В уравнении (2.7) параметр Т1 имеет размерность сек-2, параметр Т2 –сек-1, а параметр К является безразмерным. Выражение (2.7) представляет собой уравнение в стандартной форме, которая является наиболее удобной при дальнейшем анализе динамических процессов. В этом случае собственный оператор Q(p) принимает вид алгебраического уравнения:
![]()
8 Статические характеристики
9.Прямое преобразование Лапласа
Это отношение прямого преобразования Лапласа сигнала на выходе звена к прямому преобразованию Лапласа входного сигнала при нулевых начальных условиях.
![]()
Допустим динамика описывается дифференциальным управлением:
![]()
Применим к данному уравнению прямое преобразование Лапласа:
![]()