

Задатчик интенсивности зи
Предназначен для линейного изменения во времени входного сигнала ргулятора скорости при скачкаобразном изменении задающего сигнала (рис. 2.5.), чем исключаюстся броски тока в переходных процессах по каналу управления и плавность разгона и торможения.

ЗИ выполнен на двух операционных усилителях ОУ: компараторе D60 и интеграторе D61. При скачкообразном изменении задающего напряжения происходит линейноре изменение напряжения на выходе ОУ D61 за счет заряда конденсатора С317. Линейно-изменяющиеся напряжение по цепи обратной связи R426, R365 подается на инвертирующий вход компаратора ОУ D60. При равенстве напряжений на входах компаратора происходит фиксация (запоминание) выходное напряжение интегратора ОУ D61 на уровне напряжения задания ± UЗАД. Напряжение на выходе компаратора при этом колеблиться в районе нуля (рис.2.6):

Скорость нарастания выходного напряжения ЗИ регулируется потенциометром RP23. Потенциометром RP26 производиться балансировка выходного напряжения компаратора.
Регулятор скорости
Представляет собой пропорционально-интегральный (ПИ) регулятор (рис.2.7) и выполнен на операционном усилителе D62.

На инвертирующем входе регулятора происходит суммирование управляющего сигнала скорости, поступающего с задатчика интенсивности ЗИ, и сигнала отрицательной обратной свзяи по скорости, снимаемого с тахогенератора ТГ и имеющего противоположную полярность. Диапазон изменения входного управляющего напряжения от 0 до ± 10 В. Реакция регулятора на скачок изменения входного сигнала показана на (рис.2.8):

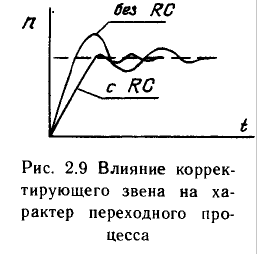
Балансировка РС осуществляется при помощи потенциометра RP24. Для удобства проверки и первоначального пуска привода предусмотрено наладочное сопротивление R435, позволяющее сделать регулятор пропорционнальным с коэффициентом передачи около единицы (К~1). Настройка динамических характеристик привода осуществляется изменением коэффициента усиления регулятора потенциометром RP25. В цепи обратной связи по скорости предусмотрена корректирующая цепочка R432, С318, позволяющая подстраивать ускорение и уменьшать перерегулирование (рис.2.9):
Потенциометром RP22, осуществляется установка максимальной скорости вращения привода. Перемычка М17 позволяет увеличить глубину обратной связи по скорости, ограничив тем самым величину nmax ,что является полезным при первоначальном включении привода на станке. Предусмотрен «ключ» на встречно включенных полевых транзисторах VT66 и VT67., блокирующий конденсатор C320 регулятора скорости , создавая тем самым нулевые начальные условия интегрирования. Сигнал блокировки (+15В) поступает с транзистора VT42 блока логики при первоначальном включении и при срабатывании схемы защиты. Одновременно блокируются импульсы СИФУ. При нормальной работе ключ разомкнут (на входе 30 В), работает ПИ регулятор. Выходное нвапряжение РС является заданием на регулятор тока РТ, осуществляя тем самым подчиненное регулирование. Предусмотрено ограничение выходного напряжения РС, и следовательно, максимальной величины тока при помощи системы токоограничения.
Схема токоограничения
Схема токоограничения выполнена на операциооных усилителях D56 и D57 (рис. 2.7), включенных встречно-параллельно регулятору скорости,где UCM=+15В – постоянное напряжение смещения, подаваемое на инвертирующий вход ОУ D56 и на неинвертирующий вход ОУ D57. При нулевой скорости РС (UPC=0), за счет смещения напряжения на выходе ОУ D56 отрицателное напряжение, а на выходе ОУ D57 – положительное. Диоды VD 357 и VD358 заперты, схема токооограничения отключена от регулятора скорости . По мере разгона привода напряжение ны выходе UPC растет. В зависимости от полярности напряжение на ОУ D56 или ОУ D57меняет знак, и при UPC =±11,5 В, открывается один из диодов: VD 357 или VD358, регулятор скорости шунтируется. Напряжение на выходе регулятора при этом поддерживается на уровне ±11,5 В, ограничивая величину задания на на регуляторе тока РТ и саму величину тока.
Схема выделения модуля
Выполнена на ОУ D63 и D64 (рис.2.7) и предназначена для получения положительного входного напряжения задания регулятора тока вне зависимости от направления вращения двигателя. Это связанно с тем, что сигнал отрицательной обратной связи по току якоря IЯ, снимаемый с выпрямительного моста VD 365… VD 370, всегда отрицателен (рис.2.3). Рассмотрим работу схемы: 1. На входе схемы выделения модуля положительное напряжение UВХ=+ UPC . В этом случаи диод VD360 открыт, диод VD361 закрыт и ОУ D63 работает как инвертор с коэффициентом передачи (КD63=-1). Напряжение на выходе сумматора D64 равно: UВЫХ=+ UPC. 2. На входе отрицательное напряжение UВХ=-UPC. Диод VD360 заперт, а диод VD361 открыт, через ОУ D63 входное напряжение не проходит: UВЫХ=+ UPC. Итак, напряжение на на выходе системы выделения модуля всегда положительно, это напряжение явл. Входным для регулятора тока.