

Лекция 1
.pdf3. Кинематические уравнения прямолинейного равномерного движения. Кинематические уравнения равноускоренного движения.
Рассмотрим частные случаи движения материальной точки, определяемые свойствами кинематических характеристик, и получим для этих случаев кинематические уравнения–зависимостикинематическиххарактеристикотвремени.
1.Равномерноепрямолинейноедвижение v const, a 0
По определению: |
dr |
v, |
|
dr vdt. Интегрируя левую часть от r |
до r t и правую |
|||
|
|
|||||||
|
|
|
dt |
|
|
0 |
|
|
r t |
|
|
|
|
|
|||
|
t |
|
|
|
|
|||
от t 0 доt dr |
vdt r |
t r0 |
vt или r t r0 vt. |
|
||||
r0 |
0 |
|
|
|
|
|
||
Полученная |
зависимость |
|
радиус-вектора от времени вместе с выражениями |
|||||
v const, a 0 |
представляют |
собой |
кинематические уравнения прямолинейного |
|||||
равномерного движения в векторном виде. Если ось ОХ направить вдоль направления скорости (вдоль траектории, которая прямолинейна), то уравнение для радиус-вектора в проекции на этуось будетиметь вид x t x0 vt, а путь, пройденный теломк моменту времениt,будетопределятьсяхорошоизвестнымвыражением s vt.
11
2.Равноускоренноедвижение a const 0
|
|
dv |
|
|
|
|
|
|
v t |
t |
|
t v0 |
|
|
||
По определению |
|
|
|
a, |
|
dv |
adt. Интегрируя |
dv adt v |
at |
или |
||||||
|
dt |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v0 |
|
|
|
|
|
v t v at. Учтем, |
что |
dr |
|
v dr vdt v |
at dt. Интегрируя левую и правую |
|||||||||||
|
||||||||||||||||
0 |
|
|
|
|
dt |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
at2 |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
частиполучаем: r t r |
v t |
|
|
. |
|
|
|
|
|
|
|
|||||
2 |
|
|
|
|
|
|
|
|||||||||
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
Такимобразом,ввекторнойформекинематическиеуравненияравноускоренного
|
|
|
|
|
|
|
at2 |
|
движенияимеютвид a const, |
v |
t v0 |
at, |
r |
t r0 |
v0t |
|
. |
2 |
||||||||
Для равнопеременного движения кинематические уравнения имеют вид:
|
|
|
|
|
|
|
at2 |
|
a const, |
v |
t v0 |
at, |
r |
t r0 |
v0t |
|
. |
2 |
||||||||
12
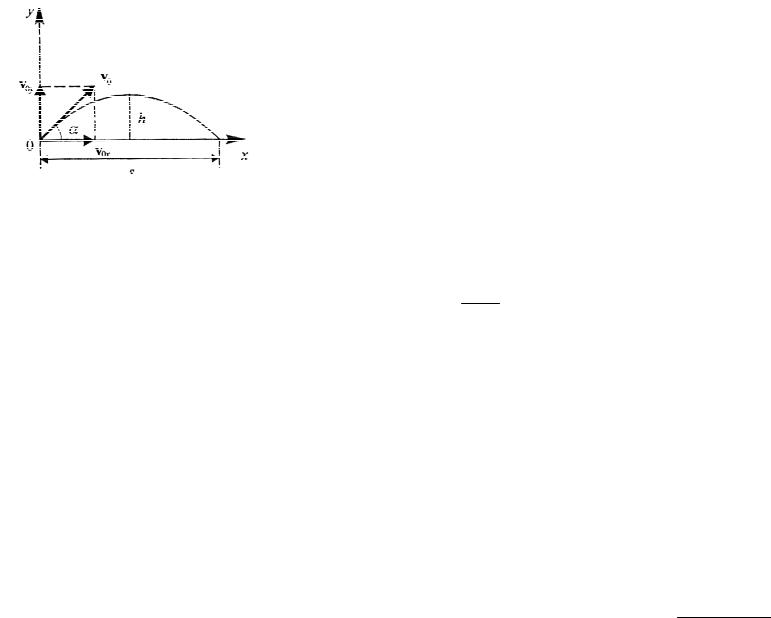
Примером равноускоренного движения является баллистическое движение без учетасопротивлениявоздуха–свободноедвижениетелвполесилытяжести.Если осьОYнаправитьвертикальновверх,аосьОХ–горизонтально,товпроекцияхна этиосикинематическиеуравненияпримутвид:
|
ax 0, vx v0x, x x0 v0xt; |
|
gt2 |
|
||||||
|
a |
|
g, v |
|
v |
gt |
, y y v |
t |
. |
|
|
|
|
|
|||||||
v0x v0 cos ; v0y v0 sin |
|
y |
|
y |
0y |
|
0 0y |
2 |
|
|
Для тела, брошенного с начальной скоростью v0 под углом к горизонтуиз начала координат, кинематические урав-
нениязапишутсяввиде: x v0tcos , y v0tsin gt2 .Траекториядвижения–парабола,описываемаяуравнением
2
y xtg |
g |
|
x2. Из кинематических уравнений можно найти параметры полета: время полета T 2t (t – |
||||||||||||||
2v2 cos2 |
|
||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
времяподъема),высотуподъема–h,дальностьполета–s: |
|
|
|
|
|
|
|
||||||||||
h |
gt2 |
, |
h y v tsin |
gt2 |
|
gt2 |
v tsin |
gt2 |
, |
gt |
2 2v tsin gt2 |
, |
2gt |
2 2v tsin , |
|||
|
|
|
|
||||||||||||||
2 |
|
|
0 |
2 |
2 |
0 |
2 |
|
|
0 |
|
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
||||||||
gt v0 sin , t |
v0 sin |
,T 2t |
2v0 sin |
; |
|
|
||||||||
|
|
|
||||||||||||
|
gt2 |
|
gv2 sin2 |
g |
v2 sin2 |
|
|
g |
2 cos sin |
|||||
|
|
|
|
|
; s x v tcos |
v |
||||||||
h |
|
|
0 |
|
|
0 |
|
0 |
||||||
|
|
|
|
|||||||||||
|
|
|
|
|
||||||||||
|
2 |
|
2g2 |
|
|
|
2g |
|
0 |
|
|
g |
||
|
|
|
|
|
|
|
|
|
|
|||||
v02 sin2 . 2g
13
4.Движение по окружности.
Описание движенияматериальнойточкипоокружностидаже с постояннойповеличине скоростью с помощью введенных кинематических характеристик довольно сложно, поскольку ни ускорение, ни скорость при этом не являются постоянными величинами, так как меняют свое направление (v const, a const). В то же время само движе-
ние довольно простое и должно быть какое-нибудь простое его описание. Действитель-
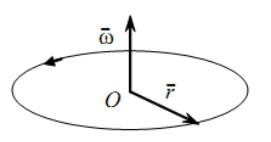
но, описание вращения будет простым, если ввести угол поворота , [рад], как характеристикуположения материальной точки. Тогда скоростью будет скорость вращения, которая определяется как угол поворота в единицу времени и называется мгновенной угловой скоро-
стью . Угловая скорость равна производной угла по времени
|
|
|
d |
|
|
|
|
рад |
||||
|
|
d |
|
|||||||||
lim |
|
|
|
|
|
иливвекторномвиде |
|
|
, |
|
|
. |
|
|
dt |
dt |
с |
||||||||
t 0 t |
|
|
|
|
|
|||||||
Мгновенное угловое ускорение – скорость изменения угловой скорости
|
|
|
|
|
|
|
рад |
||||
|
|
|
d |
|
|||||||
|
lim |
|
|
|
|
|
, |
|
|
|
|
|
|
dt |
с |
2 |
|||||||
|
t 0 t |
|
|
|
|
|
|||||
14
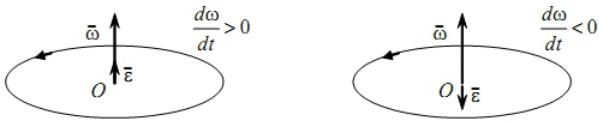
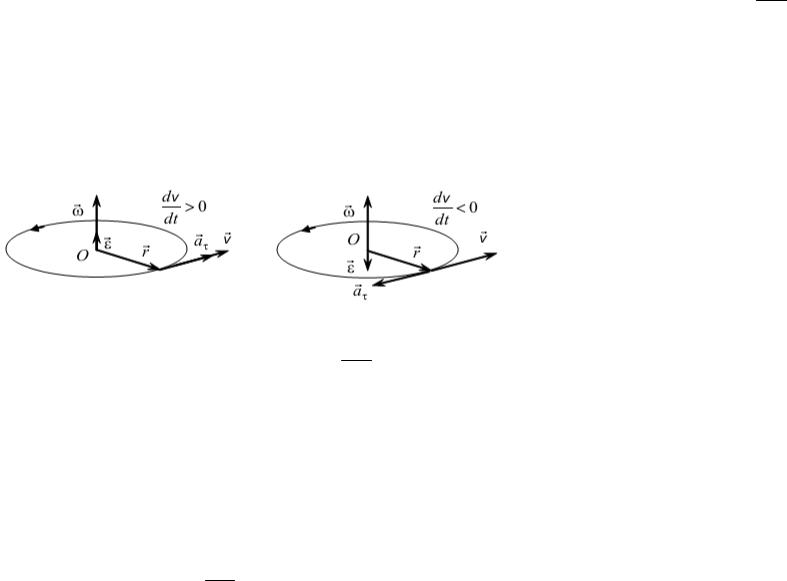
При ускоренном движении угловое ускорение совпадает по направлению с угловой
скоростью, . При замедленном вращении угловое ускорение направлено в проти-
воположнуюотносительноугловойскоростисторону, .
При равномерном движении материальной точки по окружности кинематические уравнения в угловых переменных будут иметь вид
0, const, t 0 t.
При движении материальной точки по окружности с постоянным угловым ускорением кинематические уравнения будут иметь вид, аналогичный прямоли-
нейному равноускоренному движению (процедура получения уравнений одинаковая)
const, t |
t, t |
|
t |
t2 |
. |
|
2 |
||||
0 |
|
0 |
0 |
|
15
Очевидно, что угловые переменные, введенные для вращения, и линейные переменные должны быть связаны друг с другом, так как с помощью тех и других можноописатьодноитожедвижение.Найдемэтусвязь.
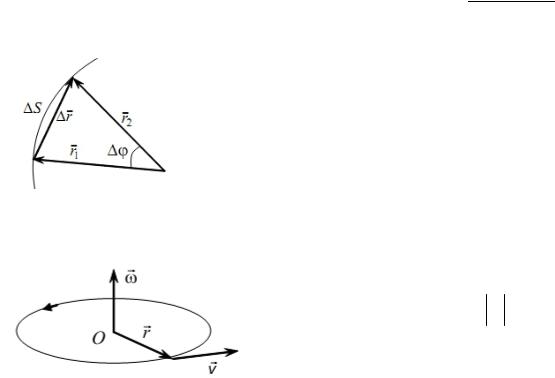
По определению единицы измерения угла – радиана. Дуга окружности S связана с радиусомокружностиRсоотношением S R илидляприращений S R.
|
|
|
По определению v lim |
|
r |
|
lim |
|
r |
|
|
. При t 0 длина хорды |
|||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||
t |
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
t 0 |
|
|
t 0 t |
|
|
|
|
||||||||||||
|
r |
|
|
|
|
стремиться к |
длине |
|
дуги |
|
S, т. е. |
|
r |
|
S или |
||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||
|
lim |
|
|
r |
|
|
lim |
S |
. Тогда v lim |
S |
lim |
|
R R. |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
t 0 t |
|
|
t 0 t |
|
t 0 t |
t 0 t |
|
|
|
|
|
||||||||||||||||||||
В векторном виде, с учетом направлений вектора можно записать v ,r , r R
16
Найдем связь между ускорениями. По определению a dv,а v ,r , то
|
|
d |
|
|
d |
|
|
|
|
dr |
|
|
dt |
|||||
|
|
|
|
|
|
|||||||||||||
a |
|
|
,r |
|
|
|
|
,r |
|
|
, |
|
|
,r |
,v |
. |
||
dt |
|
|
||||||||||||||||
|
|
|
|
dt |
|
|
|
|
|
dt |
|
|
|
|
||||
Первое слагаемое , r – называется тангенциальной составляющей ускорения (тангенциальным ускорением) (направле-
|
|
|
но по скорости, если , и против, если |
||
|
|
|
, т. е. всегда параллельно скорости)
a ,r . Тангенциальное ускорение характеризует быстроту изменения вектора
скорости по величине a dv. dt
Второе слагаемое ,v – называют нормальной составляющей ускорения (нормальным ускорением, центростремительным) (направлено по радиусу к цен-
тру окружности, то есть перпендикулярно скорости) an ,v . Нормальное ускорение характеризует быстроту изменения вектора скорости по направлению
an v 2R v2 .
R
17

v
a
a
an
Полное ускорение a равновекторнойсумме нормальногоитангенциальногоускорений a a an.
Нормальное ускорение направлено по радиусу, а тангенциальное – по касательной к окружности, они перпендикулярны друг другу, и величина
полногоускорениябудетравна a a 
 a2 an2 .
a2 an2 .
При равномерном вращении тангенциальное ускорение будет равно нулю, полное ускорение будет отлично от нуля и равно постоянному по величине нормальному ускорению.
При неравномерном вращении величина нормального ускорения, an v2 , не бу-
R
дет постоянной. В случае равноускоренного вращения (с постоянным угловым ускорением) тангенциальное ускорение будет постоянным по величине, a const, но не по направлению.
Тангенциальная составляющая ускорения характеризует быстроту изменения скорости по модулю (направлена по касательной к траектории), а нормальная составляющая ускорения – быстроту изменения скорости по направлению (направленакцентрукривизнытраектории).
18
В зависимости от тангенциальной и нормальной составляющих ускорения дви-
жениеможноклассифицироватьследующимобразом:
1)аτ = 0, an = 0 – прямолинейное равномерное движение;
2)aτ ≠ 0= const, an = 0 – прямолинейное равнопеременное движение. При та-
ком виде движения a |
a |
v |
|
v2 |
v1 |
. |
|
|
|
||||
|
|
t t2 |
t1 |
|||
3)aτ = f(t), аn =0 – прямолинейное движение с переменным ускорением;
4)aτ = 0, an = const. При aτ = 0 скорость по модулю не изменяется, а изменяется по направлению. Из формулы аn= v2 /r следует, что радиус кривизны должен быть
постоянным. Следовательно, движение по окружности является равномерным;
5)aτ = 0, an ≠ 0 – равномерное криволинейное движение;
6)aτ = const, an ≠ 0 – криволинейное равнопеременное движение;
7)aτ =f(t), an ≠ 0 – криволинейное движение с переменным ускорением.
19

Криволинейное движение. Общий случай.
При произвольном движении траектория криволинейная, а скорость непостоянна. В этом случае ускорение тоже можно разложить на нормальную и тангенциальную составляющие a ,r ,v . Нормальная составляющая ускорения an ,v будет направлена к центрумгновеннойокружности – окружности, дуга которой совпадает с траекторией движения материальной точки на
бесконечно малом участке,где находится материальная точка в момент времени t. Вели-
|
a |
dv |
|
an |
v2 |
|
чины ускорений будут определяться теми же выражениями |
|
и |
|
, где |
||
dt |
R t |
|||||
R t –радиусмгновеннойокружностиилирадиускривизнытраектории.
Таким образом, произвольное движение может быть рассмотрено как движение по траектории переменной кривизны, то есть в отличие от вращения R t const. На прямолинейномучасткетраектории R t и,естественно, an 0 и a a .
20