

курсовик по сау 2012
.docФГОУ ВПО
«ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ-УЧЕБНО-НАУЧНО-ПРОИЗВОДСТВЕННЫЙ КОМПЛЕКС»
Кафедра «Электрооборудование и энергосбережение»
РАСЧЕТНО-ГРАФИЧЕСКАЯ РАБОТА
АВТОМАТИЗАЦИЯ
СИСТЕМ ЭНЕРГОСБЕРЕЖЕНИЯ
по дисциплине «СУТПиТП»
Проверил преподаватель
Комаристая Л.С.
Выполнил студент
Сечина Д.С.
Группа 41-ТХ
Оценка__________________________
Дата ____________________________
Орел, 2012
Содержание:
Введение…………………………………………………………………………3
1 Схема и основные характеристики технологической установки…………..5
2 Составление функциональной схемы автоматизации технологической установки…………………………………………………………………………6
3 Построение кривой разгона объекта по каналу регулирования, выбор типа регулятора………………………………………………………………………..8
4 Определение пригодности регулятора и параметров его настроек………..12
5 Анализ АСР на устойчивость по критериям устойчивости Гурвица и Михайлова………………………………………………………………………15
5.1 Определение устойчивости системы по критерию Гурвица……………..17
5.2 Проверка устойчивости САУ по критерию Михайлова…………………18
6 Определение запаса устойчивости АСР по фазе……………………………21
Заключение……………………………………………………………………...24
Список литературы……………………………………………………………..26
ВВЕДЕНИЕ.
Автоматика – отрасль науки и техники, охватывающая теорию и принципы построения средств и систем управления производственным процесом. Автоматика является основой автоматизации.
Автоматизация – этап развития машинного производства, который характеризуется освобождением человека от непосредственного выполнения функций управления производственными процессами и передачей этих функций техническим устройствам.
Управление производственным процессом – это такое воздействие на него, которое обеспечивает оптимальный или заданный режим работы. Объект управления – управляемый производственный процесс. Совокупность технических средств, используемых для управления, и производственного персонала, который принимает в нем непосредственного участие, образует совместно с объектом систему управления.
Процесс управления складывается из следующих основных функций, которые выполняются системой управления:
- получение измерительной информации о состоянии производственного процесса как объекта управления;
- переработка полученной информации и принятии решения о необходимом воздействии на объект для достижения целей управления;
- реализация принятого решения, т.е. непосредственное воздействие на производственный процесс.
Средство измерений – это средство, предназначенное для получения информации о состоянии объекта управления.
Среди автоматических систем наиболее распространены автоматические системы регулирования (АСР). АСР предназначены для поддержания заданных значений технологических параметров, которые характеризуют состояние производственного процесса как объекта регулирования. С появлением новых технических средств в практику автоматизации вошел новый тип систем управления – автоматизированные системы управления технологическими процессами.
Широкое внедрение автоматизации пищевых производств позволяет повысить эффективность технологических процессов и обеспечить полную сохраность натуральных свойств исходного сырья, которое поступает на переработку.
-
СХЕМА И ОСНОВНЫЕ ХАРАКТЕРИСТИКИ ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКИ.
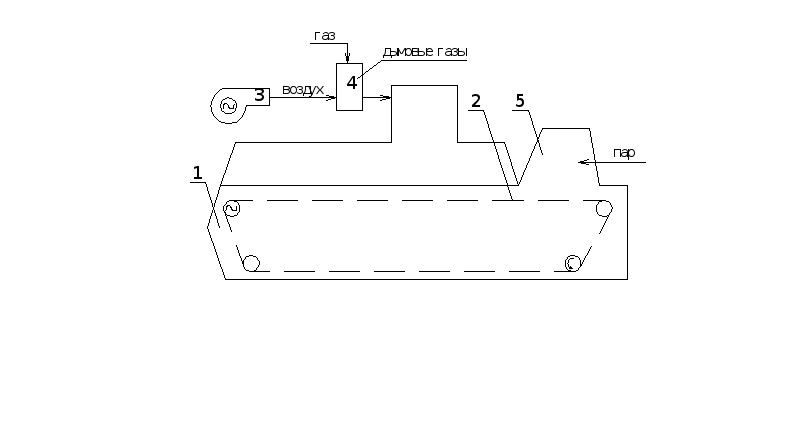
Рисунок 1.1 – Схема хлебопекарной печи
Регулируемые параметры: температура дымовых газов, подаваемых в центральную зону пекарной камеры.
Контролируемые параметры температура, давление газа.
Сушка (высушивание) материалов состоит в удалении влаги из влажных материалов путем ее диффузии из твердого материала и испарения.
Необходимость удаления влаги из материала может быть обусловлена разными причинами, например:
Влажный продукт может портиться при хранении, так как влага вредно воздействует на товарные свойства некоторых материалов: слеживание, смерзание в зимнее время, образование плесени.
-
СОСТАВЛЕНИЕ ФУНКЦИОНАЛЬНОЙ СХЕМЫ АВТОМАТИЗАЦИИ ТЕХНОЛОГИЧЕСКОЙ УСТАНОВКИ
Функциональная схема автоматизации (ФСА) дает представление о функционально - блочной структуре системы автоматического управления – регулирования, сигнализации, защиты технологического процесса или установки и определяет объем оснащения установки (объекта) аппаратурной автоматики. На ФСА изображены: технологическое оборудование, коммуникации, органы управления и средства автоматизации (датчики, регулирующие и контролирующие приборы, элементы управления, вычислительные устройства и пр.).
В зоне щитов и пультов условно изображают установленные средства автоматизации. От них линии связи идут к элементам схемы установки. Приборы и средства, установленные вне щитов, - местные приборы.
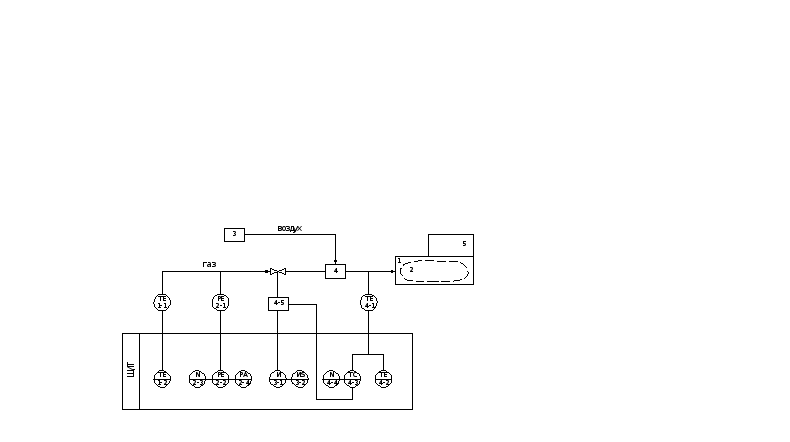
Рисунок 2 – Функциональная схема автоматизации регулирования и контроля температуры и давления газа.
В соответствие с заданием для регулирования и контроля температуры и давления газа в технологической установке на выходе из топки установлен измеритель температуры (поз. 4-1), имеющий сдвоенный чувствительный элемент (сдвоенная термопара), один из которых подключен ко вторичному прибору, установленному на щите (поз. 4-2), осуществляющий показание и запись температуры, а другой – к электрическому регулятору (поз. 4-3), имеющему датчик (поз. 4-4), не встроенный в регулятор. Исполнительным механизмом (поз. 4-5) можно управлять вручную с помощью кнопок управления (поз. 4-5) можно управлять вручную с помощью кнопок управления (поз. 3-1) через переключатель режима работы – ручное – автоматическое (поз. 3-2). Исполнительный механизм изменяет подачу газа в топку. Для контроля давления на выходе в топку установлен датчик давления (поз. 2-1), который подключен ко вторичному прибору на щите (поз. 2-2), осуществляющему показание давление газа и имеющему задатчик (поз. 2-3) и сигнализацию (поз. 2-4) для обеспечения техники безопасности. Измеритель температуры подаваемого газа (поз. 1-1) подключен к прибору, установленному на щите (поз. 1-2), осуществляющему показания и запись температуры.
-
ПОСТРОЕНИЕ КРИВОЙ РАЗГОНА ОБЪЕКТА ПО КАНАЛУ РЕГУЛИРОВАНИЯ, ВЫБОР ТИПА РЕГУЛЯТОРА
Исходные данные для построения кривой разгона объекта по каналу регулирования сведены в таблицу 1.
Таблица 1
|
№ п/п |
Возмущение Х, % Р.О. |
Относительное время кривой разгона tотн |
Показатели качества процесса регулирования |
||||||||||||
|
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1,0 |
|||||
|
данные эксперимента – отклонение параметра yэ(t) |
y1 |
yост |
yр.отн |
||||||||||||
|
4 |
25 |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10,1 |
10,1 |
45 |
10 |
1,6 |
Абсолютное значение времени определяется по формуле:
![]() ,
,
где tпер. – время переходного процесса, указанное для технологической установки.
![]()
Кривую разгона объекта строим в единицах регулируемой величины по формуле:
![]() ,
,
где
![]() – отклонение по кривой разгона,
– отклонение по кривой разгона,
![]() –
отклонение параметра по таблице 1.
–
отклонение параметра по таблице 1.
Результаты пересчета t и у сводим в таблицу 2.
Таблица 2
|
Параметр |
Значение |
||||||||||
|
tотн |
0 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
1 |
|
Xэ (t) |
0 |
0,8 |
2,6 |
6,6 |
8,8 |
9,6 |
9,8 |
9,9 |
10 |
10,1 |
10,1 |
|
t(М) |
0 |
1,2 |
2,4 |
3,6 |
4,8 |
6 |
7,2 |
8,4 |
9,6 |
10,8 |
12 |
|
X(t) |
0,00 |
0,95 |
3,09 |
7,84 |
10,46 |
11,41 |
11,64 |
11,76 |
11,88 |
12,00 |
12,00 |
По данным таблицы строим кривую разгона объекта (рисунок 3).
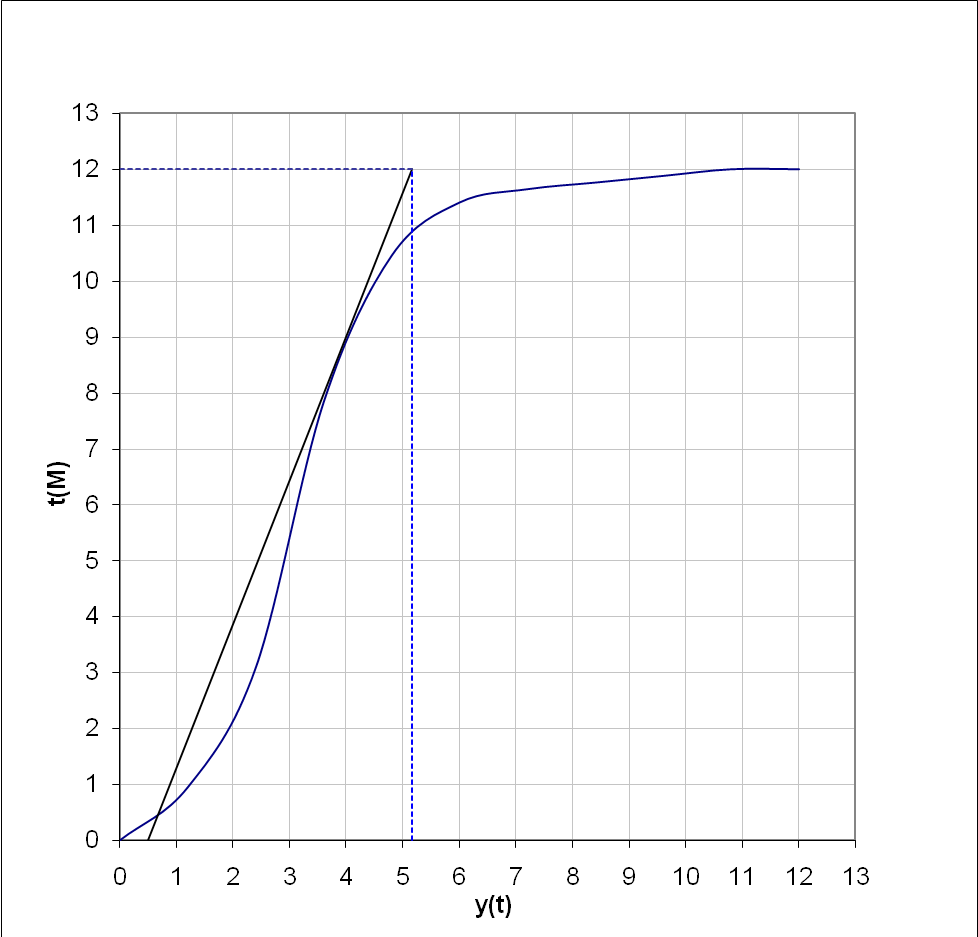
Рисунок 3 – Кривая разгона
На кривой разгона объекта проводим касательную к точке перегиба и определяем графически динамические и установившиеся параметры объекта:
t=0,5 мин,
Т=4,65 мин,
у¥=12.
Затем рассчитываем вспомогательные параметры:
![]() ;
;
![]()
![]()
![]()
![]()
![]()
По номограмме
![]() выбираем закон регулирования.
выбираем закон регулирования.
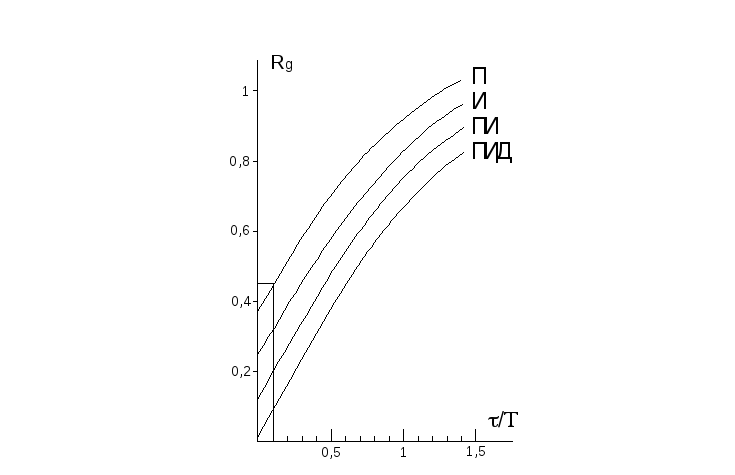
Рисунок 4 –
Номограмма
![]()
Согласно координаты точки (Rg, t/Т) и ближайшей к ней кривой – это
П – регулятор.
-
ОПРЕДЕЛЕНИЕ ПРИГОДНОСТИ РЕГУЛЯТОРА И ПАРАМЕТРОВ ЕГО НАСТРОЕК
После того, как мы выбрали закон регулирования определяем время регулирования tр и остаточное отклонение.
Время регулирования tр определяем по номограмме tр/t=f(t/Т) (рисунок 5).
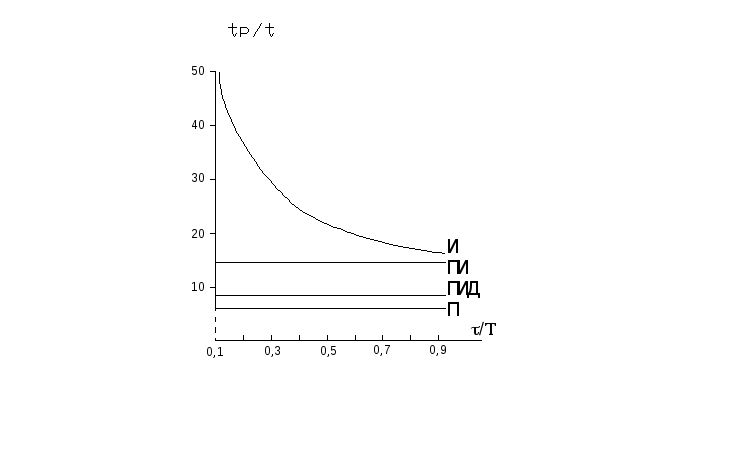 Рисунок 5 – Номограмма tр/t=f(t/Т)
Рисунок 5 – Номограмма tр/t=f(t/Т)
К оси абсцисс в точке с соответствующим значением t/Т восстанавливаем перпендикуляр до пересечения с графиком П – регулятора. По оси ординат определяем величину «С» отношения tр/t, тогда время регулирования tр определяем по формуле:
![]() ;
;
![]()
Затем проверяем неравенство:
![]() ;
;
![]()
![]()
Так как.
![]() ,
следовательно, регулятор выбран верно.
,
следовательно, регулятор выбран верно.
По графику
![]() (рисунок 6) определяем графически
остаточное отклонение.
(рисунок 6) определяем графически
остаточное отклонение.
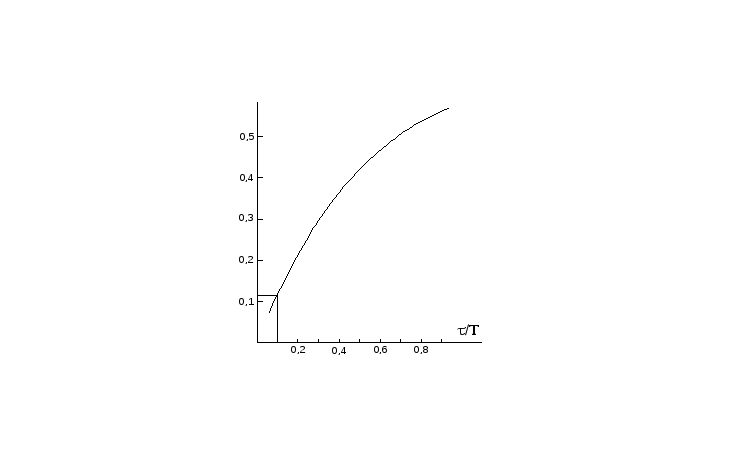
![]() Рисунок 6 – Номограмма
Рисунок 6 – Номограмма
![]()
А=0,116;
![]()
1,4<10;
Закон регулирования П – регулятора имеет вид:
![]() ;
;
Определяем параметры настроек регулирования по формуле:
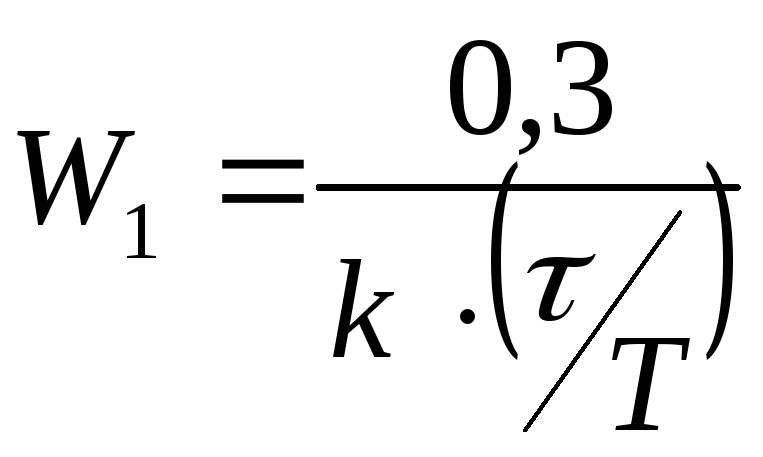 ;
;
![]()
![]()
-
АНАЛИЗ АСР НА УСТОЙЧИВОСТЬ ПО КРИТЕРИЯМ УСТОЙЧИВОСТИ ГУРВИЦА И МИХАЙЛОВА.
Анализируемая АСР задана исходной структурной схемой, рисунок 7.
f(p)
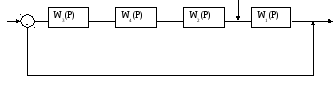 Рисунок
7. Структурная схема.
Рисунок
7. Структурная схема.
![]()
Заменяем параметры передаточных функций их числовыми значениями из таблицы 3.
Таблица 3.
|
Параметры звена |
k1 |
T1 |
1 |
k01 |
k2 |
T2 |
2 |
k02 |
k3 |
3 |
k4 |
T4 |
4 |
|
8 |
1 |
1.2 |
0 |
0.4 |
0. |
0.2 |
1 |
0.9 |
0 |
0.5 |
0,7 |
0,5 |
Формулы передаточных функций имеют вид:
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
Записываем передаточную функцию замкнутой АСР по управлению Wз.у.(Р) и возмущению Фf(P):
![]()
![]()
![]()

5.1ОПРЕДЕЛЕНИЕ УСТОЙЧИВОСТИ СИСТЕМЫ ПО КРИТЕРИЮ ГУРВИЦА.
Для определения устойчивости системы по Гурвицу приравниваем к 0 знаменатель передаточной функции по уравнению:
![]()
В общем виде:
![]()
При положительных коэффициентах критерий Гурвица сводится к проверке неравенства:
![]()
![]()
Так как выполняется данное условие, следовательно система автоматического управления устойчива.
Определяем критический коэффициент усиления разомкнутой системы по формуле:
![]() ;
;
![]()
5.2 ПРОВЕРКА УСТОЙЧИВОСТИ САУ ПО КРИТЕРИЮ МИХАЙЛОВА.
Для проверки САУ по критерию Михайлова в характеристическом уравнении для замкнутой системы заменяем оператор дифференцирования Р на jw, полученное комплексное число представляем в алгебраической форме записи:
![]()
![]()
![]()
![]()
Изменяя значение w от 0 до определяем значение функции и строим график на комплексной плоскости. На первоначальном этапе определяем точки пересечения годографа Михайлова с действительной и мнимой осями.
1)
![]() ;
;
![]()
![]()
![]()
2)
![]() ;
;
![]() ;
;
![]() .
.![]()
Изменяя значение w определяем U(w) и V(w), полученные данные сводим в таблицу 4.
Таблица 4.
|
W |
0 |
0.5 |
1.0 |
1.5 |
1.7 |
2.0 |
2.3 |
2.5 |
3.0 |
|
U(w) |
1,44 |
0.0475 |
-5.06 |
-16.67 |
-24.118 |
-39.44 |
-61.0857 |
-79.8725 |
-146.34 |
|
V(W) |
0 |
2.308 |
3.038 |
1.152 |
-0.374 |
-3.308 |
-6.612 |
-8.680 |
-11.142 |
По данным таблицы строим годограф, рисунок 8.
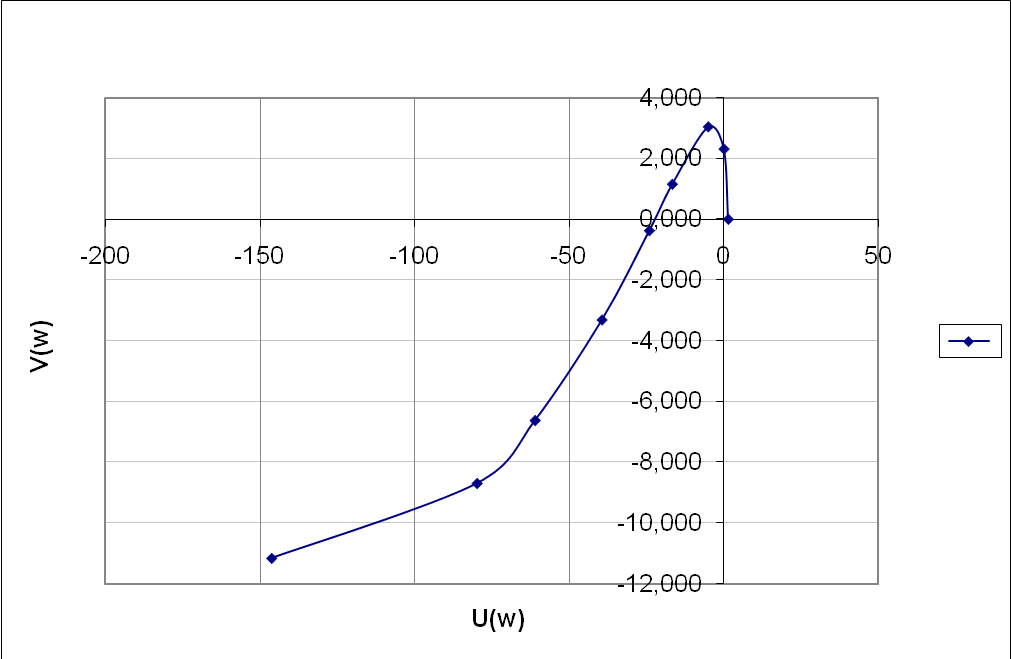
Анализируя годограф Михайлова делаем следующие выводы:
САУ по критерию Михайлова устойчива, так как при показателе степени характеристического уравнения n=5 кривая обходит в положительном направлении 3 квадрата.
Определенный по графику коэффициент максимального усиления kmax= - 47,3
![]()
KД– коэффициент усиления, KД =4,5
KЗ – коэффициент запаса устойчивости, KЗ = 15,30
![]()
Сравнения его со значением, определенным по критерию Гурвица, мы видим, что они равны:
![]()
-
ОПРЕДЕЛЕНИЕ ЗАПАСАУСТОЙЧИВОСТИ АСР ПО ФАЗЕ.
Для определения запаса устойчивости по фазе воспользуемся критерием Михайлова – Найквиста. Для этого в периодической функции разомкнутой системы:
![]()
Выпишем отдельно числитель и разделим его на вещественную и мнимую составляющие, заменив P на jw:
![]()
![]()
A=jw2+2,45+1,44
UA(w) =4,44
jVA(w) =jw+2.45w
Амплитудно-частотную характеристику численно найдем по формуле:
![]()
Фазово-частотную характеристику численно найдем по формуле:
φA(w) = -arctg VA(w)/UA(w) = -arctg 2.45w/1.44;
Выпишем знаменатель и так же разделим его на вещественную и мнимую части:
B= 0.12·jw4-0.64·jw3+1.12jw2+3.45jw+1.44;
UB(w) =1.12w2+0.12w4;
jVB(w) =3.45·jw-0.64jw3;
Амплитудно-частотную характеристику определим по формуле:
![]() ;
;
Чтобы система была устойчива, необходимо, чтобы логарифмические частотные характеристики разомкнутой системы удовлетворяли следующему требованию: необходимо и достаточно, чтобы при всех частотах, при которых ЛАЧХ положительна, значения фазы не превышали «-π».
Так как передаточная
функция системы содержит интегрирующее
звено
![]() ,
то эта система является статической и
кривая зависимости
,
то эта система является статической и
кривая зависимости
![]() никогда не пересечет «-π», то есть система
заведомо устойчива.
никогда не пересечет «-π», то есть система
заведомо устойчива.
Фазово-частотную характеристику определим по формуле
φB(w) = -arctg VB(w)/UB(w) = -arctg (3.45jw-0.64·w3)/(1.44-1.12·w2+0.12w4);
![]() ;
;
![]() ;
;
φ(w) = -Π/2-[ arctg φA(w)+ arctg φB(w)]
φ(w) = -Π/2-[ arctg 2.45jw/1.44+ arctg (3.45jw-0.64jw3)/( 1.44-
-1.12w2+0.12w4)]
|
W |
1 |
1,25 |
1,75 |
2 |
2,5 |
3 |
3,5 |
3,75 |
|
lgW |
0 |
0,096 |
0.243 |
0,301 |
0,397 |
0,477 |
0,544 |
0,574 |
|
20lgA(w) |
2,507 |
-0,038 |
-4,437 |
-6,24 |
-9,258 |
-11,713 |
-13,78 |
-14,701 |
|
Φ(w) |
0 |
-0.469 |
-0,86 |
-0,941 |
-1,034 |
-1,086 |
-1,12 |
-1,134 |
|
4 |
4,5 |
5 |
|
0,602 |
0,653 |
0,698 |
|
-15,562 |
-17,129 |
-18,527 |
|
-1,145 |
-1,164 |
-1,179 |
По данным таблицы строим годограф, рисунок 9.
Проведя прямую из начала координат до пересечения кривой с окружностью единичного радиуса, определяем угол φ между кривой и осью абсцисс. Полученное численное значение равно запасу устойчивости системы по фазе:
φ=1,31 рад =75
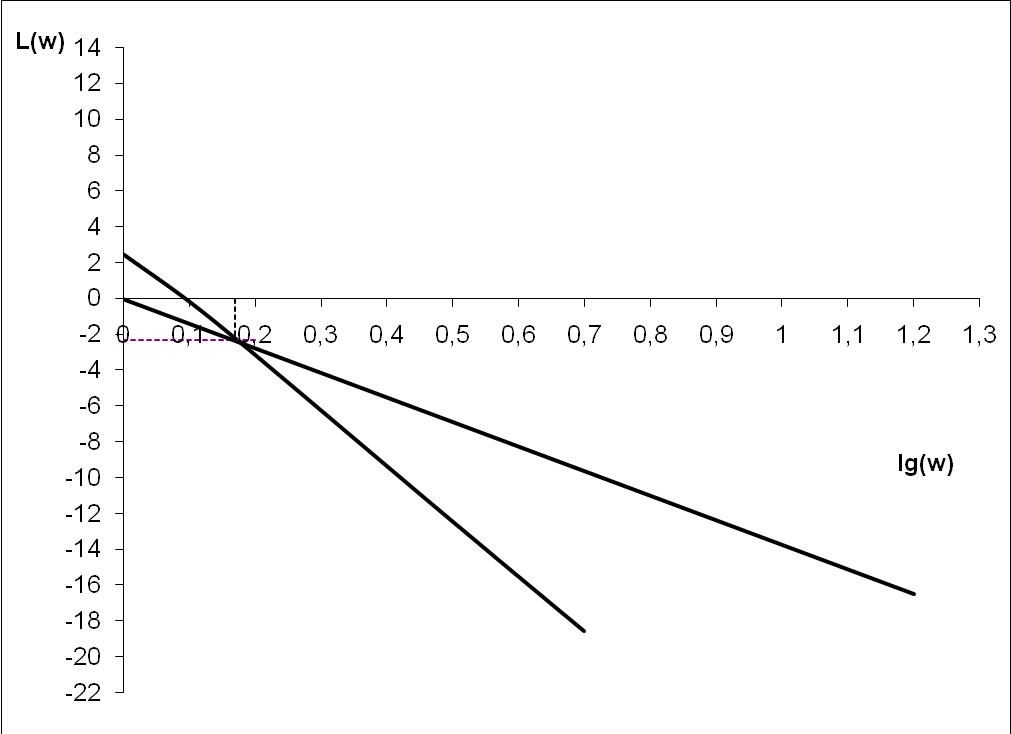
Рисунок 9 – Запас устойчивости по фазе
По графику определяем запас устойчивости по фазе
Δφ=2,25 рад = 128,916°, больше 30° - следовательно система является устойчивой.