

Лабораторная работа №2 частотный метод синтеза
Цель работы: определить передаточную функцию Wk(p) регулятора (корректирующего устройства), включение которого в систему обеспечит в ней заданное качество работы.
Постановка задачи: будем рассматривать объект управления, поведение которого описывает передаточная функция W0(p). Требования к поведению замкнутой системы заданы в виде оценок переходного процесса, в качестве которых используются статическая ошибка yст, перерегулирование σ и быстродействие tр.
Необходимо:
1. Построить асимптотическую ЛАЧХ объекта;
2. Построить желаемую ЛАЧХ в соответствии с заданными значениями перерегулирования σ и времени переходного процесса tp;
3. Определить передаточную функцию регулятора;
4. Построить переходный процесс в замкнутой системе с полученным корректирующим устройством и оценить качество переходного процесса.
Теоретические сведения
Частотный метод синтеза предполагает использование асимптотических логарифмических амплитудных частотных характеристик, он применяется для расчета одноканальных систем, функционирующих в режиме слежения или отработки входного воздействия. Предполагается, что корректирующее звено (регулятор) находится на входе системы. Расчетная структурная схема системы имеет вид, изображенный на рис.2.1.

Рис2.1. Расчетная структурная схема одноконтурной АСР (Wк(p) – передаточная функция регулятора (корректирующего устройства), Wоб(p) – передаточная функция объекта).
Передаточная функция разомкнутой системы определяется по формуле:
![]() (1)
(1)
Для АЧХ разомкнутой системы справедливо равенство:
![]() ,
(2)
,
(2)
которое в логарифмическом масштабе принимает вид
![]() .
(3)
.
(3)
Приравняв правую часть этого выражения L*(p), получим
![]() (4)
(4)
Отсюда следует расчетное соотношение для логарифмической характеристики регулятора, которое является основным в частотном методе синтеза
![]() .
(5)
.
(5)
Здесь L*(ω) – желаемая ЛАЧХ разомкнутой системы.
Таким образом, для расчета регулятора необходимо построить логарифмическую амплитудную частотную характеристику (ЛАЧХ) объекта и на основе требований к качеству процессов в замкнутой системе сформировать ЛАЧХ разомкнутой системы. Затем следует определить ЛАЧХ регулятора в соответствии с последней формулой.
Построение асимптотической ЛАЧХ объекта.
Часто модель объекта управления
представляет собой последовательную
цепочку типовых звеньев, поэтому
![]() можно
получить, суммируя отдельные ЛАЧХ.
Подобное суммирование позволяет
предложить следующую процедуру
построения.
можно
получить, суммируя отдельные ЛАЧХ.
Подобное суммирование позволяет
предложить следующую процедуру
построения.
1. На частоте ω = 1 или в логарифмическом масштабе lgω = 0 фиксируется точка, соответствующая значению 20lgkоб, где kоб– коэффициент усиления объекта.
2. На оси абсцисс отмечаются частоты
сопряжения
![]() ,
,![]() ,
где n – число типовых звеньев в составе
передаточной функции объекта.
,
где n – число типовых звеньев в составе
передаточной функции объекта.
3. До первой частоты сопряжения строится низкочастотная асимптота с наклоном -20r дБ/дек, если Wоб(p) содержит интегрирующие звенья, а r – число таких звеньев. Наклон характеристики будет равен +20l дБ/дек, если передаточная функция объекта содержит дифференцирующие звенья, l – число таких звеньев. Низкочастотная асимптота строится таким образом, чтобы она сама или ее продолжение проходили через точку 20lgkоб.
4. На частотах сопряжения происходит «излом» асимптотической ЛАЧХ объекта. Наклон ЛАЧХ изменяется на -20r дБ/дек, если соответствующая частоте сопряжения постоянная времени находится в знаменателе передаточной функции объекта, r – число таких звеньев. «Излом» асимптотической ЛАЧХ будет равен +20l дБ/дек, если постоянная времени находится в числителе передаточной функции, а l – число звеньев. Новая асимптота проводится до следующей сопрягающей частоты сопряжения, где также происходит ее «излом» в соответствии с указанным правилом.
Построение желаемой ЛАЧХ. Расчетное соотношение для kpопределяется из формулы для статической ошибки:
![]() ,
(6)
,
(6)
где kp– коэффициент усиления разомкнутой системы.
Исходными данными для построения желаемой ЛАЧХ в среднечастотной области являются требования к качеству переходного режима: время регулирования tри перерегулирование σ. ЛАЧХ на частоте среза ωсрдолжна иметь наклон – 20 дБ/дек. Частота среза ωсрможет быть определена по приближенной формуле:
 (7)
Частотный диапазон, в
котором желаемая ЛАЧХ в районе частоты
среза должна проходить с наклоном – 20
дБ/дек, определяется выражением:
(7)
Частотный диапазон, в
котором желаемая ЛАЧХ в районе частоты
среза должна проходить с наклоном – 20
дБ/дек, определяется выражением:
 (8)
(8)
Это требование можно выразить и эквивалентным, предъявляемым к отклонению ЛАЧХ:
 .
(9)
.
(9)
Т.о. поведение желаемой ЛАЧХ в СЧ - области полностью, легко и с приемлемой точностью определено на рис. 2.2.
Далее переходим к построению желаемой
характеристики в области высоких и
низких частот. Для обеспечения требуемой
статической ошибки следует обеспечить
совпадение в области низких частот
желаемой ЛАЧХ L*(ω) с ЛАЧХ объекта
![]() .
.

Рис.2.2. Поведение желаемой ЛАЧХ в среднечастотной области
В области высоких частот эти характеристики могут совпадать, или быть параллельными. Далее среднечастотная часть сопрягается с низкочастотной и высокочастотной асимптотами желаемой ЛАЧХ. Наклон ЛАЧХ на участках сопряжения должен быть кратным 20 дБ/дек. Их следует проводить так, чтобы получить наиболее простую характеристику.
Определение передаточной функции регулятора (корректирующего устройства). Асимптотическую ЛАЧХ регулятора определяют графически в соответствии с основным соотношением частотного метода синтеза:
![]() .
.
По найденной характеристике определяются частоты сопряжения, где происходит излом Lк(ω), и соответствующие им значения постоянных времени. Передаточная функция Wк(p) определяется на основе процедуры, обратной по отношению к правилу построения ЛАЧХ объекта. Причем в окончательную передаточную функцию регулятора следует добавить рассчитанный коэффициент усиления.
Последовательность выполнения работы![]()
Построить асимптотическую ЛАЧХ объекта в соответствии с заданной передаточной функцией Wоб(p);
Определить общий коэффициент усиления системы kрпо формуле (6);
Построить желаемую ЛАЧХ в среднечастотной области в соответствии с заданными значениями перерегулирования σ и времени переходного процесса tp;
Построить желаемую ЛАЧХ в области высоких и низких частот, совместив ее с ЛАЧХ объекта;
Графически найти Lк(ω) как разность между желаемой характеристикой L*(ω) системы и ЛАЧХ объекта
 ;
;Определить передаточную функцию регулятора;
Запустить систему MatLab. Создать LTI-объекты с передаточными функциями объекта регулирования и корректирующего устройства. Получить передаточную функцию замкнутой системы в соответствии со схемой на рис. 1;
Построить переходный процесс в замкнутой системе с полученным корректирующим устройством;
Оценить качество переходного процесса. Сравнить полученные показатели с заданными значениями времени регулирования tр, перерегулирования σ и статической ошибки yст.
Методический пример
Дана передаточная функция объекта:
![]() ,
,
где коэффициент усиления kоб= 10, а постоянные времени Т1= 0,1с, Т2= 1с.
Определить передаточную функцию регулятора исходя из условий, что σ = 18%; tр= 4с; yст= 0.1.
1. Построим асимптотическую ЛАЧХ объекта, предварительно определив характерные точки:

Отметим эти точки на координатных осях (рис.2.3).

Рис. 2.3. Асимптотическая ЛАЧХ объекта.
Построение ЛАЧХ начинается из области низких частот, которая расположена левее первой частоты сопряжения. Низкочастотная асимптота имеет наклон -20дБ/дек, т.к. передаточная функция объекта содержит интегрирующее звено. Проводится она до частоты ω1так, чтобы ее продолжение пересекало ось ординат в точке 20lgkоб. На частоте ω1происходит излом характеристики на -20 дБ/дек, что соответствует апериодическому звену в составе объекта. До следующей частоты сопряжения (ω2) асимптота имеет наклон -40дБ/дек. Излом характеристики на частоте ω2равен -20дБ/дек, так как в составе объекта есть апериодическое звено с постоянной времени Т2. Следовательно, наклон последней асимптоты будет равен -60дБ/дек.
2. Определим общий коэффициент системы из формулы:
![]() ,
откуда
,
откуда
![]() .
.
3. Построим желаемую ЛАЧХ. Частота среза определяется по приближенной формуле (7), согласно которой
![]() .
.
Частотный диапазон, в котором наклон желаемой ЛАЧХ составляет -20дБ/дек, определим по формуле (8):
![]()

4. На рис. 2.4 показана желаемая ЛАЧХ, сопряженная с ЛАЧХ объекта.

Рис.2.4. Пример построения желаемой ЛАЧХ.
5. ЛАЧХ корректирующего устройства определяется как разность между желаемой характеристикой L*(ω) системы и ЛАЧХ объекта Lоб(ω) (рис. 2.5).
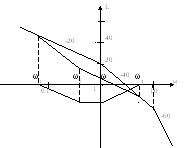
Рис.2 5. Пример построения ЛАЧХ корректирующего устройства.
6. Определим частоты сопряжения ωi,
где![]() ,
которые соответствуют точкам излома
характеристики корректирующего звена
Lк(ω):
,
которые соответствуют точкам излома
характеристики корректирующего звена
Lк(ω):
ω1= 0,08; ω2= 0,6; ω3= 1; ω4= 7.
Передаточная функция регулятора запишется в виде:
![]() ,
,
где![]() .
Уточним передаточную функцию регулятора:
.
Уточним передаточную функцию регулятора:
![]() .
.
7. Создадим в MatLab замкнутую систему, состоящую из объекта и корректирующего устройства и получим переходную характеристику с помощью команды step (рис. 2.6):

Рис.2.6. Переходная характеристика замкнутой системы.
8. Полученная характеристика почти полностью отвечает заданным условиям:
yст= 0;
σ = 18%;
tр= 4,63 сек.
Варианты заданий.
 ;
σ = 18%; tр= 4с; yст= 0.1.
;
σ = 18%; tр= 4с; yст= 0.1. ;
σ = 20%; tр= 5с; yст= 0.1.
;
σ = 20%; tр= 5с; yст= 0.1. ;
σ = 25%; tр= 5с; yст= 0.12.
;
σ = 25%; tр= 5с; yст= 0.12. ;
σ = 30%; tр= 7с; yст= 0.2.
;
σ = 30%; tр= 7с; yст= 0.2. ;
σ = 15%; tр= 5с; yст= 0.1.
;
σ = 15%; tр= 5с; yст= 0.1. ;
σ = 20%; tр= 5с; yст= 0.18.
;
σ = 20%; tр= 5с; yст= 0.18. ;
σ = 30%; tр= 8с; yст= 0.21.
;
σ = 30%; tр= 8с; yст= 0.21. ;
σ = 18%; tр= 6с; yст= 0.1.
;
σ = 18%; tр= 6с; yст= 0.1. ;
σ = 28%; tр= 5с; yст= 0.1.
;
σ = 28%; tр= 5с; yст= 0.1.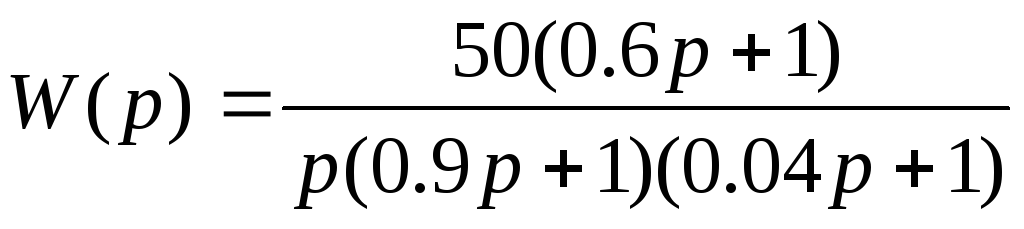 ;
σ = 23%; tр= 2с; yст= 0.1.
;
σ = 23%; tр= 2с; yст= 0.1. ;
σ = 21%; tр= 10с; yст= 0.15.
;
σ = 21%; tр= 10с; yст= 0.15. ;
σ = 18%; tр= 4с; yст= 0.1.
;
σ = 18%; tр= 4с; yст= 0.1.
Контрольные вопросы:
Какие оценки переходного процесса вводятся в виде требований к поведению замкнутой системы?
Запишите основные соотношения частотного метода синтеза.
Опишите процедуру построения ЛАЧХ объекта.
Как определяется коэффициент усиления регулятора?
Что называется частотой среза и как она выбирается?
Как определяется асимптотическая ЛАЧХ корректирующего устройства?