

3.2 Решение в Excel
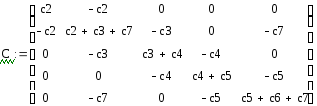
Составим матрицу масс и матрицу жесткости пружины. Найдем обратные матрицы масс и жесткостей. Вычислим матрицу H1 как произведение матрицы масс на обратную матрицу жесткостей и матрицу H2 как произведение обратной матрицы масс на матрицу жесткостей. В итоге получаются значения максимальной и минимальной частоты колебаний, и соответствующие им собственные векторы:
|
|
1,000 |
|
0,495 |
|
|
-3,667 |
|
0,227 |
|
H1= |
0,328 |
H2= |
0,640 |
|
|
-0,073 |
|
1,000 |
|
|
0,917 |
|
0,221 |
3.3 Решение в Mathcad
|
|











Значения совпали с полученными раннее в Excel.
3.4 Решение в Fortran
Программа состоит из двух подпрограмм: головной и стандартной функции MINV, необходимой для вычисления обратных матриц.
Текст головной подпрограммы:
|
3.5 Вывод
Значения, полученные в трех программных продуктах совпадают друг с другом. Задача решена верно.
4.Определение собственных форм колебаний упругой балки
4.1 Постановка задачи
Требуется
определить три первые формы колебаний
упругой балки (рис. 4.1). Безразмерные
параметры f,
g,
w,
q
приведены
в таблице 4.1.
Исходные данные. Таблица 4.1
|
f |
g |
w |
q |
|
1 |
1 |
0 |
1 |
Рис. 4.1. Балка
 (4.1)
(4.1)
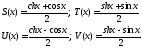
Собственные формы Y(z), где z – безразмерная координата, колебаний консольной балки через функции Крылова определяются как:
 (4.2)
(4.2)
Параметры
 иD
зависят от граничных условий на правом
конце балки. Собственные значения
иD
зависят от граничных условий на правом
конце балки. Собственные значения
 определяются из следующего
характеристического уравнения:
определяются из следующего
характеристического уравнения:
 (4.3)
(4.3)
Уравнение
(4.3) имеет бесчисленное множество
положительных корней
 .
Для каждого значения
.
Для каждого значения коэффициентD
определяется из уравнения:
коэффициентD
определяется из уравнения:  (4.4)
(4.4)
Каждому
значению
 иD
соответствует своё значение Y(z).
иD
соответствует своё значение Y(z).