

Материалы по Техн. механике / Лр ПМ / ЛР КинАнЗубчМех2012
.pdf11
В результате водило становится неподвижным, т.к. его суммарная угловая скорость равна сумме ωН + (–ωН) = 0 . Для любого же колеса m величина суммарной угловой скорости будет равна сумме ωm + (–ωН) =
ωm – ωН . Таким образом, с остановкой водила механизм превращается в зубчатый механизм с неподвижными осями зубчатых колес, показанный на рис.6. В нем все зубчатые колеса вращаются (такой механизм и называется обращенным).
u(H )
Передаточное отношение k m обращенного механизма на
основании сказанного может быть получено с учетом выражений (1) и (6)
через число зубьев колес, передающих вращение с колеса k на колесо m, поскольку в этом механизме все оси колёс неподвижны.
Для механизма, изображенного на рис.5, согласно (10)
u13(H ) = |
ω1 |
−ωH |
(11) |
|
ω3 |
−ωH |
|
В выражении (11) отметим, что ω3=0 , т.к. колесо 3 в планетарном механизме – стойка. Поделив числитель и знаменатель в правой части
выражения (11) на (–ωН),
ω2- ωH
- ωH
2' 3
|
|
2 |
|
ω1 |
- ωH |
H(4) |
|
1 |
|||
|
|
Рис.6
|
|
|
|
12 |
|
|
||
получим |
ω1 −ωH = |
(ω1 −ωH ) /(−ωH ) |
|
|
ω1 |
|
|
|
u13( H ) = |
= 1− |
|
= 1− u1H (12) |
|||||
|
|
|
||||||
|
0 −ωH |
(0 −ωH ) /(−ωH ) |
|
|
ωH |
|||
В последнем выражении отношение |
|
|
ω1 |
заменено на u1H |
||||
|
|
|
||||||
|
|
|
|
|
|
ωH |
||
Вместе с тем, с использованием рис.6, запишем, учитывая, что вращение при передаче от колеса 1 к колесу 3 проходит через две ступени преобразования:
|
(H ) |
|
(H ) |
|
(H ) |
æ |
|
z |
2 |
ö |
æ |
|
z |
3 |
ö |
|
u |
|
= u |
|
×u |
2′3 |
= ç |
- |
|
÷ |
×ç |
+ |
|
÷ |
(13) |
||
|
|
z |
z |
|
||||||||||||
13 |
12 |
|
ç |
|
÷ |
ç |
|
|
÷ . |
|||||||
|
|
|
|
|
|
è |
|
|
1 |
ø |
è |
|
|
2′ ø |
|
|
Здесь учтено, что первая ступень – внешнее зацепление, а вторая – внутреннее.
Приравняв правые части выражений (12) и (13), т.к. их левые части равны, получим
1- u1H |
= - |
z2 × z3 |
, |
|||
z1 × z2′ |
||||||
откуда определяем |
|
|
|
|||
|
z2 × z3 |
|
|
|||
u1H = 1+ |
|
(13') |
||||
z1 × z2′ |
||||||
|
|
|
||||
через число зубьев зубчатых колес механизма. Положительный знак u1H
указывает на то, что звенья 1 и H вращаются в одну сторону. Следовательно, для того чтобы найти передаточное отношение от
любого зубчатого колеса k планетарного механизма до водила необходимо в выражении (10) индекс этого колеса указать первым в нижних индексах
при u(H ) . Вторым индексом m должен являться индекс неподвижного колеса на кинематической схеме механизма.
1.3Зубчатые механизмы смешанного типа
Вкачестве передаточных механизмов в технологических машинах часто используют механизмы, являющиеся комбинацией механизма с неподвижными осями и планетарного механизма.
Рассмотрим в качестве примера механизм, показанный на рис.7
Внём есть водило Н и сателлит 2, колесо 3 является опорным, колесо 1 – солнечным. Колёса 4 и 5 имеют неподвижные оси.
Таким образом, этот механизм получен последовательным присоединением планетарного механизма и механизма с неподвижными осями.

13
Пусть входным звеном является колесо 1, а выходным звеном механизма является вал с колесом 5. Определим передаточное отношение
u15 |
= |
ω1 |
= |
n1 |
(14) |
|
n5 |
||||||
|
|
ω5 |
|
|
Обозначим на рис.7 угловую скорость выходного звена Н планетарного механизма и соответственно входного звена 4 следующего механизма с
неподвижными осями через ωН (колесо 4 жестко связано с осью водила Н).
Тогда, умножив и разделив правую часть выражения (14) на ωН , получим, проделав затем перегруппировку:
u15 |
= |
ω1 |
× |
ωH |
= |
ω1 |
× |
ωH = |
ω1 |
× |
ω4 |
(15) |
|
ωH |
|||||||||||
|
|
ω5 |
|
ωH |
|
ωH |
ω5 |
|
ω5 |
|
||
3
ωвх=ω1 |
nвх=n1 |
2 |
5 |
ωвых=ω5 |
|
||
|
|
nвых=n5 |
|
H |
|
|
|
4 |
1 |
ωH |
|
|
|
|
|
Рис.7 |
|
|
|
|
Первый сомножитель |
ω1 |
= u1(H3) = u1H , а второй |
ω4 |
= − |
z5 |
= u45 . |
|
||||||
|
z4 |
|||||
|
ωH |
ω5 |
|
|
||
Следовательно, выражение (15) можно записать в виде: |
|
|||||
|
u15 =u1(H3) ×u45 , |
|
|
|
(16) |
|

14
где для определения u1(3)H можно использовать ранее полученное
выражение (13'). приняв в нём z2 = z2' (т.е. сателлит 2 является паразитным колесом в обращённом механизме. т.к. зацепляется одновременно с колёсами 3 и 1).
Таким образом, общее передаточное отношение этого механизма, полученного последовательным соединением двух указанных механизмов, определяется произведением их передаточных отношений, записанных в соответствии с направлением передачи движения.
Окончательно выражение (16) примет вид
|
æ |
|
z |
3 |
ö |
æ |
|
z |
ö |
|
|
u |
= ç1 |
+ |
|
÷ |
× ç |
- |
|
5 |
÷ |
(17) |
|
z |
z |
|
|||||||||
15 |
ç |
|
÷ |
ç |
|
|
÷ |
||||
|
è |
|
|
1 |
ø |
è |
|
|
4 |
ø |
|
Если частота вращения на входе механизма n1 задана и требуется при известном передаточном отношении u15 определить частоту вращения на выходе – n5, то очевидно на основе выражений (14), (17)
nВЫХ = n5 = n1 u15
= |
|
|
|
|
n1 |
|
|
|
|
|
= - |
n1 × z1 × z4 |
|
|||
æ |
1 |
+ |
z |
ö |
× |
æ |
- |
z |
ö |
(z + z |
3 |
) × z |
(18) |
|||
ç |
3 |
÷ |
ç |
|
5 |
÷ |
1 |
5 |
||||||||
ç |
|
|
z |
÷ |
|
ç |
|
z |
4 |
÷ |
|
|
|
|
|
|
è |
|
|
1 |
ø |
|
è |
|
|
ø |
|
|
|
|
|
||
Знак минус указывает на противоположное направление вращения входа и выхода механизма.
1.4 Зубчатые дифференциальные механизмы
Зубчатый механизм с подвижными осями колёс с двумя и более степенями свободы (W ≥ 2) называется зубчатым дифференциальным механизмом (сокращённо – зубчатым дифференциалом). Если у механизма, изображённого на рис.5 освободить второе центральное («опорное») колесо 3, соединив его вращательной парой со стойкой, то получим зубчатый дифференциал. На рис.8 представлен такой планетарный зубчатый дифференциал с одинарным сателлитом.

|
15 |
|
2 |
|
|
0 |
H |
ωH |
ω |
1 |
ω3 |
1 |
|
|
|
|
3 |
|
|
Рис. 8 |
Определим подвижность этого механизма. Число подвижных звеньев механизма равно 4 (звенья 1, 2, 3, Н). Число кинематических пар 5- го класса равно 4 (пары: 1-0, 3-0, Н-3, 2-Н) (колесо 1– стойка 0, колесо 3 – стойка 0, водило Н – колесо 3, сателлит 2 – водило Н). Число кинематических пар 4-го класса равно 2 (зацепления: колёса 1,2 и колёса 2,3). После подстановки полученных значений в правую часть выражения (9), получим
W=3·4 – 2·4 – 2 = 2 .
Таким образом, рассматриваемый механизм является дифференциальным В этом механизме могут быть 2 входа и один выход или один вход и 2
выхода. В первом случае зубчатый дифференциал предназначен для сложения движений входных звеньев (например, 1 и 3), во втором – для разделения движения входного звена (например, водила Н) с возможностью движения выходных звеньев (1 и 3) с различными угловыми скоростями (отсюда происходит название механизма, от лат. differentia – разность, различие).
Для зубчатого дифференциала не существует понятия передаточного отношения, т.к. его подвижность W>1 и при заданной скорости ведущего звена, например, Н скорости ведомых звеньев 1 и 3 будут зависеть от приложенных к ним моментов сил. Для дифференциала определяют выражение, связывающее угловые скорости всех трёх звеньев.
Угловые скорости звеньев 1, 3, Н (см. рис.8) связаны соотношением (11), которое было получено по методу обращённого движения (формула Виллиса).
u(H ) = ω1 −ωH ,
13 ω3 −ωH

16
где u( H ) = - z3 (см. замечание под формулой (16)).
13 z1
С учётом последних двух выражений можно найти угловую скорость ω3 как функцию угловых скоростей ω1 и ωН :
ω3 = uω( 1 )
H
13
æ |
|
1 |
ö |
|
|
ç |
- |
|
÷ |
×ωH |
(19) |
|
|||||
+ ç1 |
( H ) ÷ |
||||
è |
|
u13 |
ø |
|
|
|
1 |
( H ) |
|
Учитывая, что |
|
= u31 |
последнее выражение можно представить в виде: |
u( H ) |
|||
|
13 |
|
|
ω =ω |
× u(H )+ (1 |
- u(H ) ) ×ω |
H |
(20) |
3 1 |
31 |
31 |
|
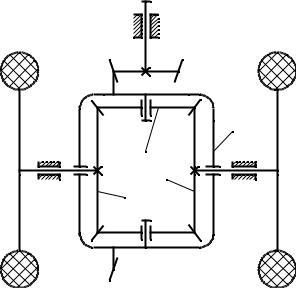
Дифференциальный механизм (дифференциал) является важной частью механизма привода (трансмиссии) автомобиля. В нём вместо плоского дифференциального механизма (см. рис.8) по конструктивным соображениям применяется дифференциальный механизм с коническими зубчатыми колёсами. На рис.9 слева направо показан переход от обычного к коническому дифференциалу.
|
2 |
2 |
3 |
|
H |
ω |
1 |
H |
1 |
1 |
|
|
|
|
|
|
3 |
|
|
Рис.9 |

17
Для определения направления вращения зубчатых колёс в пространственных зубчатых механизмах, к которым относится автомобильный дифференциал, применяется «правило стрелок». На схеме механизма направление вращения любого зубчатого колеса показывают прямой стрелкой, направленной в ту сторону, в которую движутся точки звена видимые наблюдателю. Так на схеме рис.10 стрелка у колеса 1 показывает, что точки колеса 1, видимые наблюдателю, движутся сверху вниз, а аналогично для колеса 2 – снизу вверх. Проставляя соответственно стрелки на всех колёсах механизма видим, что входное колесо 1 и выходное колесо 5 движутся одинаково, следовательно, эти колёса имеют одно направление вращения. Общее передаточное отношение механизма (рис.10) будет положительным.
|
|
|
4 |
n1 |
|
|
5 |
|
|
1 |
|
|
|
|
|
|
2 |
|
n5 |
|
|
|
3
Рис.10
Переходя к автомобильному дифференциалу, изображённому на рис.11 с
учётом правила стрелок и равенства z1 = z3 получим |
|
||||
u(H ) = |
1 |
= − |
z1 |
= − 1 |
|
u(H ) |
|
|
|||
31 |
|
z |
|
||
|
13 |
3 |
|
|
|
Выражение (20) примет вид |
|
||||
ω3 =ω1 + [1- (-1)]×ω H , |
|
||||
Откуда получим формулу дифференциала автомобиля: |
|
||||
|
|
ω1 +ω3 = 2ω H |
(21) |
||
18
|
H |
2 |
3 |
1 |
|
Рис.11
Из выражения (21) следует, что если автомобиль передвигается по
прямой и оба ведущие колеса катятся без скольжения, то ω1 = ω3 = ωН , т.е. звенья дифференциала движутся как одно твёрдое тело. На поворотах дороги и при различном сцеплении колёс с дорожным покрытием ведущие колёса вращаются с разными скоростями. Если одно из колёс остановить
(ω1= 0), то ω3 = 2·ωН , т.е. второе колесо автомобиля будет вращаться в 2
раза быстрее водила. При ωН = 0, получим ω1 = –·ω3 , т.е., если ведущие колёса освободим от соприкосновения с дорогой, остановим карданный вал и будем вращать одно колесо, то второе колесо будет вращаться в противоположную сторону с такой же угловой скоростью.
2. Порядок выполнения работы
1.Составить кинематическую схему механизма.
2.Нанести на схему обозначение всех колес и водила Н (1, 2,....), начиная от входного. Все зубчатые колеса, принадлежащие одному и тому же звену, т.е. вращающиеся совместно, получают один номер (по типу 2, 2', 2'' и т.д.)
3.Подсчитать числа зубьев всех колес и записать их в таблицу бланка отчета.
4.Подсчитать число звеньев, кинематических пар 5-го и 4-го классов
ивычислить степень подвижности механизма.
19
5.Опытным путем определить степень подвижности механизма, равное числу звеньев, которое нужно остановить, чтобы механизм полностью потерял подвижность (имеются в виду звенья, образующие вращательные пары со стойкой).
6.Выделить отдельные механизмы, составляющие последовательную цепочку, начиная от входного звена. Занести в отчет расчетные формулы для определения передаточного отношения от входного звена к выходному. Вычислить передаточные отношения составляющих цепочку механизмов и общее передаточное отношение всего механизма от входного звена к выходному.
7.Вычислить передаточное отношение (по указанию преподавателя).
8.Опытным путем определить общее передаточное отношение всего механизма, сосчитав число оборотов входного звена, приходящееся на один оборот выходного (или наоборот).
9.Составить кинематическую схему смешанного соединения механизма на основе механизма с неподвижными и подвижными осями.
10.Определить передаточное отношение этого механизма.
11.По заданной частоте вращения входного звена определить частоту вращения выходного.
12.Изобразить кинематическую схему дифференциального механизма автомобиля.
13.По заданным частотам вращения карданного вала и одного из колёс автомобиля определить частоту вращения второго колеса
3.Содержание отчёта
1.Кинематические схемы зубчатых механизмов с неподвижными и подвижными осями зубчатых колес.
2.Таблицы чисел зубьев зубчатых колес для каждой кинематической схемы зубчатого механизма.
3.Расчетные формулы и результаты определения степеней подвижности и передаточного отношения каждого зубчатого механизма.
Контрольные вопросы
1.Что такое передаточное отношение ukm ?
2.Что такое механизм с неподвижными осями зубчатых колес?
3.Какой механизм называется планетарным?
4.Когда зацепление двух зубчатых колес называется внешним?
5.Как определяется передаточное отношение трехзвенного зубчатого механизма через число зубьев зубчатых колес?
20
6.Когда зацепление двух зубчатых колес называется внутренним?
7.Как определяется передаточное отношение многозвенных механизмов с неподвижными осями зубчатых колес?
8.Какое звено планетарного механизма называется водилом ?
9.Какое звено планетарного механизма называют сателлитом ?
10.Какие зубчатые колеса в планетарных механизмах называют центральными (солнечными, опорными)?
11.Как определить передаточное отношение одной из схем планетарного механизма аналитическим способом?
12.Какова цель применения метода обращения движения при кинематическом анализе планетарного механизма?
13.Какие зубчатые механизмы называют дифференциальными ?
14.Напишите формулу, связывающую угловые скорости центральных
колес k и m в планетарном механизме (формула Виллиса).
15.Как определяется передаточное отношение зубчатых механизмов, образованных последовательным соединением механизмов с неподвижными осями зубчатых колес и планетарных ?
16.В каком случае зубчатое колесо называется паразитным ?
17.Как определяется степень подвижности зубчатого механизма?
Литература
1.Лачуга Ю.Ф. Теория механизмов и машин. Кинематика, динамика и расчёт.-М.:КолосС, 2007. – 303с.
2.Теория механизмов и механика машин: Учеб.для студентов вузов / Под ред.К.В.Фролова. - 5-е изд.,стер. - М. : Высшая школа, 2005. - 496с
3.Смелягин А.И. Теория механизмов и машин.-М.:Новосибирск: Инфра-М, 2003. – 262с.