

Материалы по Техн. механике / Лр ПМ / ЛР КинАнЗубчМех2012
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
НОВГОРОДСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ ИМЕНИ ЯРОСЛАВА МУДРОГО
________________________________________________________________
Никитин Е.И., Кузнецов Н.П.
КИНЕМАТИЧЕСКИЙ АНАЛИЗ ЗУБЧАТЫХ МЕХАНИЗМОВ
МЕТОДИЧЕСКИЕ УКАЗАНИЯ
К ЛАБОРАТОРНОЙ РАБОТЕ
Великий Новгород 2012
|
2 |
УДК 621.011(075.8) |
Печатается по решению |
H 28 |
РИС НОВГУ |
РЕЦЕНЗЕНТ
кандидат технических наук, доцент А.Ю. Кузькин
Н 28 Кинематический анализ зубчатых механизмов : метод. указ. к лабораторной работе по ТММ /авт.-сост. Е. И. Никитин, Н. П. Кузнецов ; НовГУ им. Ярослава Мудрого. – Великий Новгород, 2012. – 21 с.
В методических указаниях изложена аналитическая методика кинематического анализа зубчатых механизмов с неподвижными и подвижными осями зубчатых колёс. Рассмотрены как планетарные, так и дифференциальные механизмы
Методические указания предназначены для студентов специальностей 151001 «Технология машиностроения» , 190601 «Автомобили и автомобильное хозяйство» , 110301 «Механизация сельского хозяйства», 50502 «Технология и предпринимательство», направлений подготовки 151900 «Конструкторско-технологическое обеспечение машиностроительных производств», 190600 «Эксплуатация транспортнотехнологических комплексов», 110800 «Агроинженерия» всех форм обучения.
УДК 621.011(075.8)
© Новгородский государственный университет , 2012 © Е. И. Никитин, Н.П. Кузнецов, 2012
3
|
ОГЛАВЛЕНИЕ |
СТР. |
Цель лабораторной работы |
4 |
|
1.Основные теоретические положения |
4 |
|
1.1 |
Зубчатые механизмы с неподвижными осями зубчатых |
4 |
колес |
|
|
1.2 |
Зубчатые механизмы с подвижными осями зубчатых колес |
8 |
1.3 |
Зубчатые механизмы смешанного типа |
12 |
1.4 |
Зубчатые дифференциальные механизмы |
14 |
2. Порядок выполнения работы |
18 |
|
3. Содержание отчёта |
19 |
|
Контрольные вопросы |
19 |
|
Литература |
20 |
|

4
ЦЕЛЬ РАБОТЫ
Ознакомить с методами кинематического анализа плоских зубчатых механизмов с неподвижными и подвижными осями зубчатых колёс.
1.Основные теоретические положения
1.1Зубчатые механизмы с неподвижными осями зубчатых колес
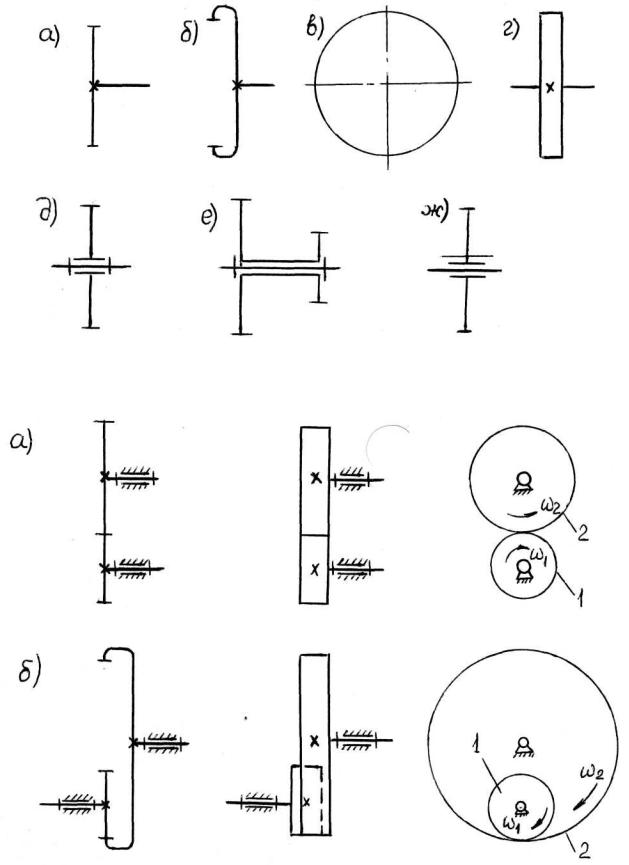
Зубчатые механизмы находят широкое применение в механизмах и машинах в качестве передаточных механизмов. При изображении их кинематических схем используют условные обозначения стандарта ГОСТ 2.770 «Обозначения условные графические в схемах. Элементы кинематики». На рис.1а показано цилиндрическое зубчатое колесо с внешним зубчатым ободом. На рис.1б – колесо с внутренним зубчатым ободом. На рис.1в и 1г показаны другие допустимые варианты обозначения зубчатых колес с внешним или внутренними ободьями. Крестик, стоящий на оси, указывает на неподвижное крепление зубчатого колеса к ней. На рис.3д показано зубчатое колесо, образующее с осью вращательную кинематическую пару. На рис.1е показаны два неподвижно соединенных между собой колеса – блок зубчатых колес, образующий вращательную кинематическую пару с осью. На рис.1ж показано зубчатое колесо, имеющее возможность поступательно перемещаться относительно оси вала (направляющее шпоночное или шлицевое соединение).
Простейшими зубчатыми механизмами являются трехзвенные зубчатые механизмы, показанные на рис.2. На рис.2а показан механизм с внешним зубчатым зацеплением. Направление угловых скоростей колес
ω1 и ω2 – противоположное. На рис.2б – внутреннее зубчатое зацепление,
в котором направление ω1 и ω2 одинаково. Важной характеристикой зубчатого механизма является передаточное отношение.
Передаточным отношением uk m называют отношение
uk m = ωk = nk ωm nm
угловых скоростей – ω или частот вращения n (в об/мин) входного звена – k и выходного звена m . Очевидно,
umk = ωm = u1
ωk km
5
Рис.1
Рис.2
6
При одинаковых направлениях ωk и ωm передаточное отношение положительно (рис.2б – внутреннее зацепление), при противоположных – отрицательно (рис.2а - внешнее зацепление').
В простейшем трехзвенном механизме зубчатые колеса n и m образуют зацепление друг с другом. Обычно боковые профили зубьев
выбирают так, чтобы передаточное |
отношение uk m |
было постоянной |
|||
величиной. Как показано [1, 2, 3] |
|
zm |
|
|
|
uk m = ωk |
= ± |
, |
(1) |
||
zk |
|||||
ωm |
|
|
|
||
где zk и zm – числа зубьев колес k и m. Знак отношения соответствует виду зацепления («минус» для внешнего, «плюс» – для внутреннего).
Передаточное отношение, осуществляемое одной парой зубчатых колес, имеет предел, превышение которого ведёт к неоправданному росту габаритов передачи и, следовательно, её массы.
Для получения больших передаточных отношений, применяют последовательное соединение рассмотренных простейших трехзвенных механизмов. При таком соединении выходное звено одного механизма соединяется жестко с входным звеном другого и т.д. Образуются сложные зубчатые механизмы называемые многоступенчатыми зубчатыми механизмами (или передачами).
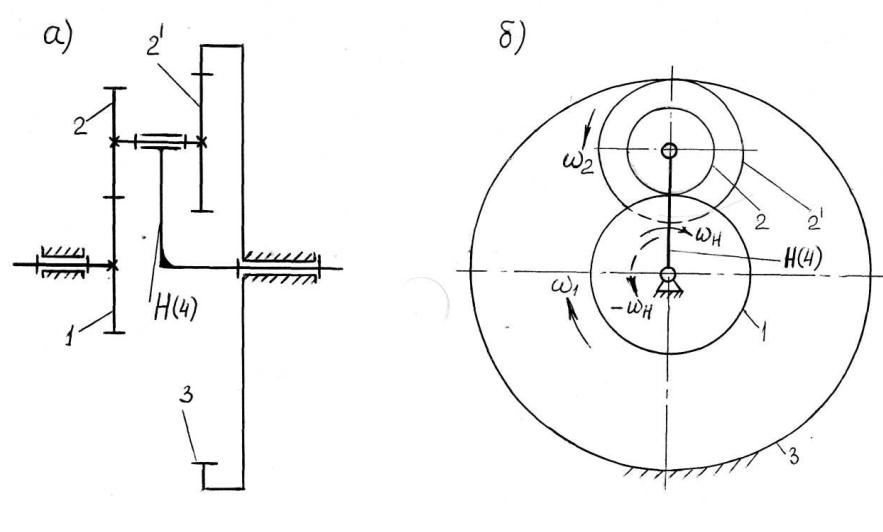
Рассмотрим механизм, в котором оси зубчатых колес вращаясь, не перемещаются в пространстве, т.е. неподвижны (рис.3).Обозначим
угловую скорость колеса 1 через ω1 , колес 2 и 2' - (образующих вместе с осью одно звено – блок 2) через ω2 , колес 3 и 3' - через ω3 колеса 4 - через
ω4 (рис. 3а).
По определению передаточного отношения
u14 =ω1 ω4 |
(2) |
Очевидно, что вращение колеса 1 передается на колесо 2. Далее с колеса 2' на колесо 3, а с колеса 3' – на колесо 4 (рис.3б). Таким образом, передаточное отношение каждой ступени преобразования вращения можно записать в виде
u12 =ω1 ω2 , u2′3 =ω2 ω3 , u3′4 =ω3 ω4 |
(3) |
В рассматриваемом механизме колесо 1 является входным звеном, колесо 4 – выходным. Остальные звенья – блоки 2, 3 – промежуточными. Умножим и разделим правую часть выражения (2) на угловые скорости промежуточных звеньев
u14 |
= |
ω1 |
= |
ω1 |
× |
ω2 |
× |
ω3 . |
(4) |
|
|
ω4 |
|
ω4 |
|
ω2 |
|
ω3 |
|

7
Очевидно, в правой части последнего выражения можно осуществить перегруппировку членов:
u14 |
= |
ω1 |
= |
ω1 |
× |
ω2 |
× |
ω3 |
(5) |
|
|
ω4 |
|
ω2 |
|
ω3 |
|
ω4 |
|
Рис.3
Рис.4
8 |
|
С учетом выражений (3) запишем выражение (5) в виде: |
(6) |
u14 =u12 ×u2′3 ×u3′4 |
Таким образом, в многоступенчатом зубчатом механизме с неподвижными осями зубчатых колес общее передаточное отношение равно произведению передаточных отношений отдельных ступеней, осуществляющих преобразование вращения от входного к выходному звену. На основании выражений (1) и (6) запишем искомое отношение через числа зубьев:
u |
= |
æ |
+ |
z2 |
ö |
×æ |
- |
z3 |
ö |
× |
æ- |
z4 |
ö . |
(7) |
|||
|
|
|
|
|
|
||||||||||||
ç |
z |
|
|
÷ |
|
||||||||||||
14 |
|
|
÷ ç |
|
z |
2 |
|
|
ç |
z |
3 |
÷ |
|
||||
|
|
è |
1 |
ø |
è |
|
|
′ |
ø |
|
è |
|
ø |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
Если числа зубьев колес, составляющих одно звено, одинаковы, то передаточное отношение механизма не зависит от этих чисел зубьев. Например, если на рис.3 имеем z3 = z3′ , то на основании выражения (7)
u14 = |
z2 |
× |
z4 |
. |
(8) |
z1 |
|
||||
|
|
z2′ |
|
||
Обычно такое звено выполняют лишь с одним зубчатым венцом, но зацепляющимся с обоими колесами соседних звеньев (колесо 3 на рис.4). Это колесо служит для изменения направления вращения последующих звеньев последовательного ряда передач без изменения общего передаточного отношения. Его в технике называют "паразитным", что по отношению к этому колесу не вполне заслуженно.
1.2 Зубчатые механизмы с подвижными осями зубчатых колес
Рассмотрим многозвенные механизмы, в которых ось, хотя бы одного звена перемещается в пространстве. В зависимости от числа степеней свободы механизма – W, различают планетарные (W = 1) и дифференциальные механизмы (W≥ 2). Для определения степени подвижности плоских механизмов используется формула П.Л. Чебышева.
W = 3× n - 2 × p5 - p4 |
(9) |
где n – число подвижных звеньев рассматриваемого зубчатого механизма (с неподвижными и подвижными осями зубчатых колес), p5 , p4 – соответственно число кинематических пар 5-го и 4-го классов. Каждое зубчатое зацепление с линейным контактом поверхностей зубьев является парой 4-го класса. Остановимся подробнее на кинематике планетарных механизмов.
На рис.5а и 5б представлены два варианта изображения кинематической схемы механизма с подвижными осями зубчатых колес. Колесо с подвижной осью называют сателлитом (на рис.5а и 5б сателлиты
2 и 2' образуют одно звено – блок сателлитов). Звено, несущее на себе
9
опоры сателлитов, называют водилом (на рис.5а и 5б, водило – звено 4).На кинематических схемах водило обычно обозначают латинской буквой – Н (от немецкого Hebel – рычаг). Зубчатые колеса, оси которых совпадают с центральной осью симметрии механизма, называют центральными (на рис.5 центральное подвижное колесо – 1 называют солнечным, а неподвижное 3 – опорным). Колесо 3 в механизме является стойкой. Определим степень подвижности механизма, изображенного на рис.5. Число подвижных звеньев механизма равно 3 (звено 1, блок сателлитов 2- 2', водило – Н). Число кинематических пар 5-го класса равно 3 (пары: стойка 3 – колесо 1, водило Н – блок сателлитов 2 и 2', водило Н – стойка 3). Число кинематических пар 4-го класса равно 2 (зацепления: колеса 1,2 и колеса 2',3). После подстановки полученных значений в правую часть выражения (9), получим
W=3·3 – 2·3 –1·2 = 1 .
Таким образом, рассматриваемый механизм является планетарным. Рассмотрим далее аналитический метод определения передаточного
отношения в планетарных механизмах. При этом используется формула Виллиса
uk(Hm) = |
ω(H ) |
= |
ω |
k |
−ω |
H |
|
|
||
k |
|
|
|
|
, |
(10) |
||||
ω |
|
|
−ω |
|
||||||
|
ω(H ) |
|
m |
H |
|
|
||||
|
m |
|
|
|
|
|
|
|||
где uk(Hm) – передаточное отношение от звена k к звену m в механизме с остановленным водилом H. В дальнейшем будем называть такой механизм обращенным. Верхний индекс Н при передаточном отношении uk(Hm)
указывает, что водило рассматривается как стойка, т.е. его присутствие указывает, что передаточное отношение относится к обращённому механизму.
Формула (10) получена с использованием метода обращения движения, суть которого состоит в следующем. Пусть при работе механизма, изображенного на рис.5б, водило вращается с угловой
скоростью ωН , колесо 1 – со скоростью ω1 , блок сателлитов 2 и 2' – со
скоростью ω2 .
Одновременно, вокруг оси водила, которая совпадает также с осями центральных зубчатых колес 1 и 3, будем мысленно вращать весь
механизм с дополнительной угловой скоростью, равной – ωН (т.е. равной ωН, но противоположно ей направленной).
10
Рис.5