

Федеральное государственное бюджетное образовательное учреждение высшего профессионального образования
«Балтийский Государственный Технический Университет «Военмех» им. Д.Ф. Устинова»
Курсовая работа по прикладному программированию по теме
«Решение дифференциальных уравнений численными методами»
Выполнил: студент Н111
Макурова В.В.
Проверил: доцент каф. Н1
Жуков Ю.А.
Санкт-Петербург
2012
Оглавлени
Техническое задание 3
Описание модели исследуемого объекта 4
Математическое описание методов интегрирования для уравнения динамики системы тел 5
Описание программы на C++ 8
Краткое описание программы в пакете Matlab и представление результатов ее выполнения 10
Описание программы в Matlab 10
Выводы 13
Оглавление 2
Техническое задание 3
Описание модели исследуемого объекта 4
Математическое описание методов интегрирования для уравнения динамики системы тел 5
Описание программы на C++ 8
Краткое описание программы в пакете Matlabи представление результатов ее выполнения 10
Выводы 13
Техническое задание
Описать физический процесс с помощью системы дифференциальных уравнений второго порядка. Разработать программу в среде C++BuilderXE2, реализующую математическое моделирование физического процесса, а также решение дифференциальных уравнений тремя методами — Эйлера, Рунге-Кутта, Адамса. Сравнить результаты, полученные тремя методами. Выполнить проверку в математическом пакетеMatlab.
Описание модели исследуемого объекта
В качестве физического процесса рассмотрим движение тележки с двумя пружинами по бокам и пружинным маятником, закрепленным сверху, внутри коробки (см. рис.1).

Рис.1. Схематическое изображение системы
Процесс описывается тремя дифференциальными уравнениями в форме Коши:
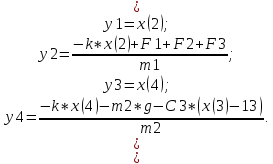 (1.1)
(1.1)
Где
m 1 – масса нижнего тела (тележки);
m 2 – масса верхнего тела (груза);
C1 – жесткость левой пружины;
C2 – жесткость правой пружины;
C3 – жесткость верхней пружины;
l1 –длина покоя левой пружины;
l2 – длина покоя правой пружины;
l3 – длина покоя верхней пружины;
w – длина нижнего тела;
h – высота нижнего тела;
k – коэффициент трения среды;
L – ширина всей площадки, на которой перемещаются тела;
nyu – коэффициент трения о поверхность
Математическое описание методов интегрирования для уравнения динамики системы тел
Обыкновенными дифференциальными уравнениями описывают задачи движения системы взаимодействующих материальных точек, сопротивление материалов и многое другое. Ряд важных задач для уравнений в частных производных также сводятся к задачам для обыкновенных дифференциальных уравнений. Таким образом, решение обыкновенных дифференциальных уравнений занимает важное место среди прикладных задач физики, химии, техники. Обыкновенные дифференциальные уравнения n-го порядка можно с помощью замены свести к эквивалентной системе n уравнений первого порядка.
Решить дифференциальное уравнение численным методом – значит для заданной последовательности аргументов х0, х1…, хnи числа у0, не определяя функцию у=F(x), найти такие значения у1, у2,…, уn, что уi=F(xi)(i=1,2,…, n) и F(x0)=y0.
Таким образом, численные методы позволяют вместо нахождения функции У=F(x) получить таблицу значений этой функции для заданной последовательности аргументов. Величина h=xk−xk-1называется шагом интегрирования.
Рассмотрим некоторые методы.
Метод Эйлера
Метод Эйлера относится к численным методам первого порядка, дающим решение в виде таблицы приближенных значений искомой функции у(х). Он является сравнительно грубым и применяется в основном для ориентировочных расчетов. Однако идеи, положенные в основу метода Эйлера, являются исходными для ряда других методов.
Рассмотрим
дифференциальное уравнение первого
порядка
 с начальным условием x=x0, y(x0)=y0.Найдём решения уравнения на отрезке
[a,b]
с начальным условием x=x0, y(x0)=y0.Найдём решения уравнения на отрезке
[a,b]
Разобьем отрезок [a,b] наnравных частей и получим последовательность х0, х1, х2,…, хn, гдеxi=x0+ih(i=0,1,…,n), аh=(b-a)/n− шаг интегрирования.
В методе Эйлера приближенные значения у(хi+1)≈yi+1вычисляются последовательно по формулам:
yi+1 = уi+hf(xi, yi) (i=0,1,2…)
При этом искомая интегральная кривая у=у(х), проходящая через точку A0(х0, у0), заменяется ломанойA0A1A2… с вершинамиAi(xi,yi) (i=0,1,2,…); каждое звеноAiAi+1этой ломаной, называемой ломаной Эйлера, имеет направление, совпадающее с направлением той интегральной кривой уравнения, которая проходит через точкуAi.
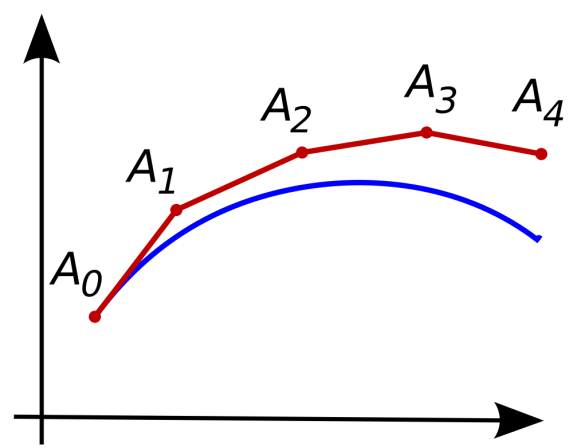
Рис.2. Ломаная Эйлера
Вычисления по методу Эйлера с пересчетом делаются в два этапа.
Прогноз:
![]()
Коррекция:
![]()
Модифицированный метод Эйлера с пересчетом имеет второй порядок точности, однако для его реализации необходимо дважды вычислять правую часть функции. Заметим, что метод Эйлера с пересчетом представляет собой разновидность методов Рунге-Кутты.
Метод Рунге-Кутты
Методы Рунге-Кутта обладают следующими свойствами:
Эти методы являются одноступенчатыми: чтобы найти ук+1, нужна информация о предыдущей точке (xк,yк)
Методы согласуются с рядом Тейлора вплоть до членов порядка hp, где степень р различна для различных методов и называется порядковым номером или порядком метода.
Они не требуют вычисления производных от f (x,y), а требуют вычисления самой функции.
Алгоритм Рунге-Кутта четвертого порядка:
Рассмотрим задачу Коши.
Приближенное значение в последующих точках вычисляется по формуле:
![]()
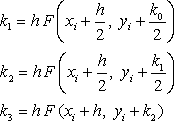
Вычисление нового значения проходит в четыре стадии:
![]()
Этот
метод имеет четвёртый порядок точности,
то есть суммарная ошибка на конечном
интервале интегрирования имеет порядок
![]() (ошибка на каждом шаге порядка
(ошибка на каждом шаге порядка![]() ).
).