1. Ступенчатые рядные механизмы
Применяются в устройствах для понижения скоростей (редукторах), для повышения скоростей (мультипликаторах) , коробках переменных передач и т.д.
|
|
|
|
| |
|
|

![]() ;
;
![]() ;
;
![]() (8)
(8)
Перемножим в выражениях (8) друг на друга левые, средние и правые части:
 (9)
(9)
![]()
![]() (10)
(10)
Здесь (-1)g – множитель для определения знака i1n, g – число внешних зацеплений
Частный
случай:
при
![]() ;
;![]() ;
и т.д. получим:
;
и т.д. получим:
![]() (11)
(11)
z2, z3, z4 … z(n-1) не влияют на величину передаточного отношения. Такие колеса называются паразитными (потери), а механизмы паразитным рядом.
Для уменьшения габаритов передачи
2. Планетарные механизмы (ω≥1)
Имеется хотя бы одно зубчатое колесо с подвижной геометрической осью. Такое колесо называется сателлитом.
Все планетарные механизмы делятся на две группы:
Дифференциальные механизмы (ω≥2); и планетарные передачи (ω=1)
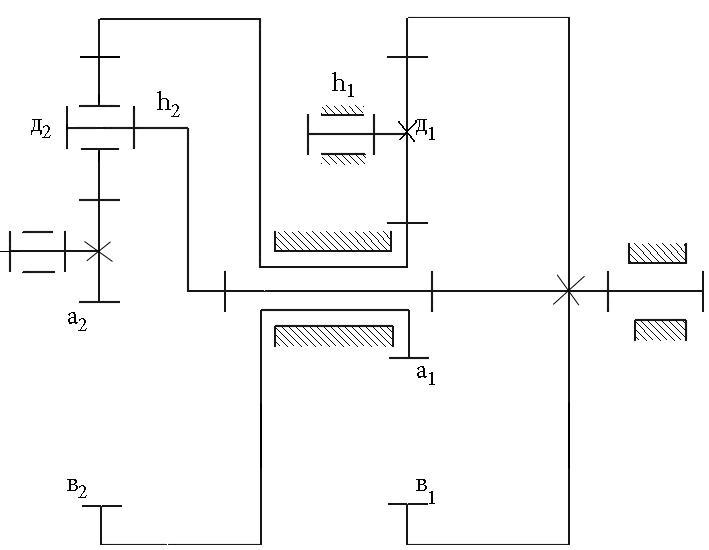
А) Дифференциальные механизмы
|
|
х-х – основная ось |
|
а,в – центральные колеса (солнечные колеса) | |
|
g,f – сателлит (в данном случае двухвенцевой) | |
|
h – водило |
Число сателлитов hw ≥ 2 (всегда) чаще nw = 3
Все сателлиты кроме одного являются пассивными звеньями и их на схеме не изображают.
а,в,h – основные звенья их признаки:
1)вращаются вокруг собственной оси
2)воспринимают нагрузки от внешних моментов
Число степеней свободы w определяется:
![]() ,т.е.
имеются 2-обобщенные координаты (положение
звеньев будет характеризоваться углами
поворота двух любых основных звеньев).
,т.е.
имеются 2-обобщенные координаты (положение
звеньев будет характеризоваться углами
поворота двух любых основных звеньев).
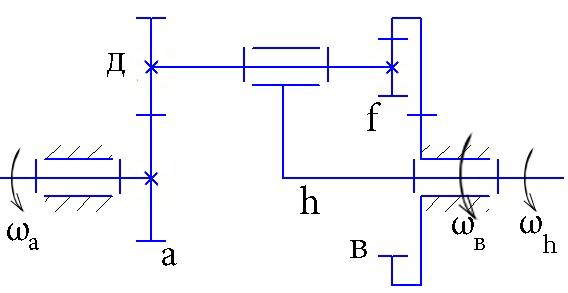
Для проведения кинематического анализа диф. механизма используется метод инверсии.
Метод состоит в мысленной остановке подвижного звена механизма при сохранении относительных движений всех звеньев
Так если всему механизму мысленно задать вращение с угловой скоростью (-ωh) , равной, но противоположной угловой скорости ωh водила h, то водило как бы , остановится, а механизм из планетарного превратится в простой рядный с неподвижными осями колес
|
|
|
|
| |
|
| |
|
|
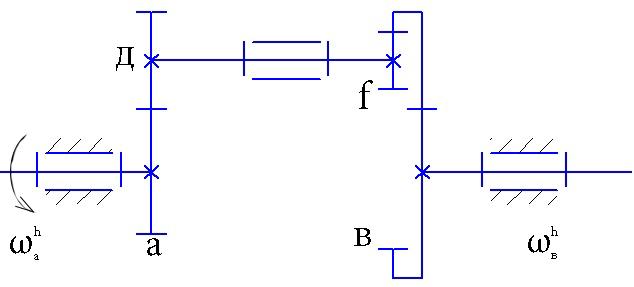
Учитывая (10), помня, что в данном случае одно внешнее зацепление, можно записать
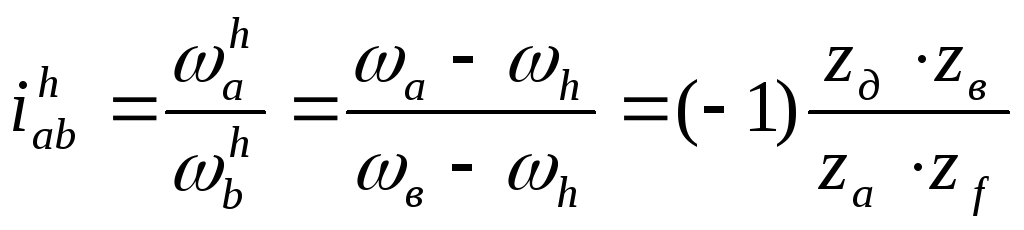 (1)
(1)
Величина
![]() является
передаточным отношением механизма с
неподвижными осями полученного из
планетарного остановкой водила, а
формула (1) устанавливает однозначную
связь между ωа
;ωв
;ωh
основных звеньев с одной стороны и
числом зубьев всех колес с другой.
Поэтому зная любые две угловые скорости
найдем третью.
является
передаточным отношением механизма с
неподвижными осями полученного из
планетарного остановкой водила, а
формула (1) устанавливает однозначную
связь между ωа
;ωв
;ωh
основных звеньев с одной стороны и
числом зубьев всех колес с другой.
Поэтому зная любые две угловые скорости
найдем третью.
Аналогично можно получить передаточное отношение при остановке колеса в.
![]() (2)
(2)
Сложим (1) и (2)
![]() (3)
(3)
Из уравнения (1) или (2) выразим ωа , с учетом (3)
![]()
Введя индексы а → μ; в → ν; h → τ получим:
![]() (4)
(4)
Дифференциальные механизмы применяются:
для функционального сложения движения
|
|
Например,
при
|
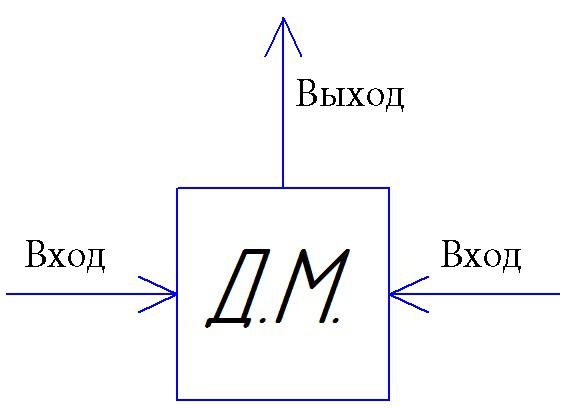
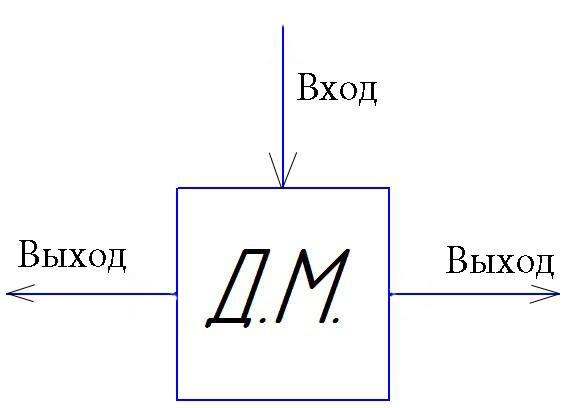
2) для обеспечения движения звеньев с различными скоростями при сохранении соотношения моментов на валах (например в транспортных машинах). В этом случае одно из основных звеньев (обычно водило) является входным, а два других – выходным. Не учитывая потери на трение и другие виды потерь, считая мощность на входном валу положительной, а на выходных – отрицательной, имеем
![]() (5)
(5)
Где
![]() ,
,
![]() ,
,![]() - крутящие моменты на соответствующих
валах
- крутящие моменты на соответствующих
валах
Применив метод обращения движения, мысленно остановим звено τ из (5) получим:
![]()
![]()
Т.е. отношение моментов на двух основных звеньях обратно пропорционально отношению их угловых скоростей относительно третьего основного звена взятого с обратным знаком.
|
|
2.Планетарные передачи
Образуются из дифференциальных механизмов за счет введения дополнительных связей двумя путями :
А) путем закрепления одного из центральных колес (П.П. с неподвижным солнечным колесом)
Б) путем введения дополнительной кинематической цепи, обычно зубчатой, между любыми двумя основными звеньями.
|
|
|
|
Тогда
определим
| |
|
Используя (3) получим | |
|
| |
|
здесь
|
Величина
и знак
![]() определяют
кинематический эффект передачи : он
особенно большой если
определяют
кинематический эффект передачи : он
особенно большой если
![]() положительно и приблизительно равно
1.
положительно и приблизительно равно
1.
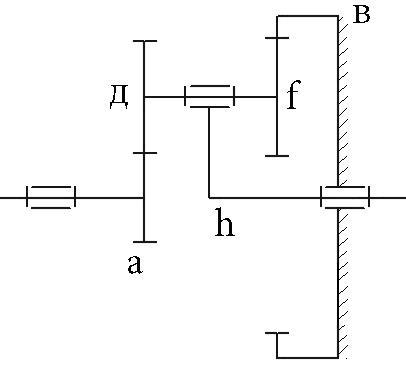
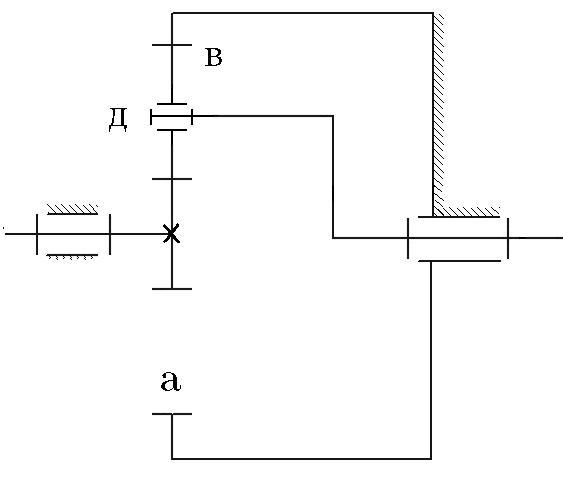
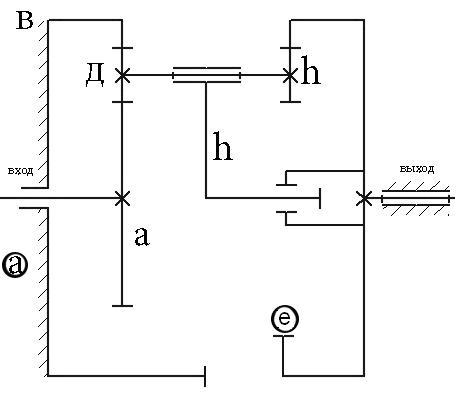
Покажем это на примере механизма типа «Д»
|
|
Если: zв = 101 |
|
zд = 99 | |
|
Za = zf = 100 | |
|
|
 однако
КПД
однако
КПД
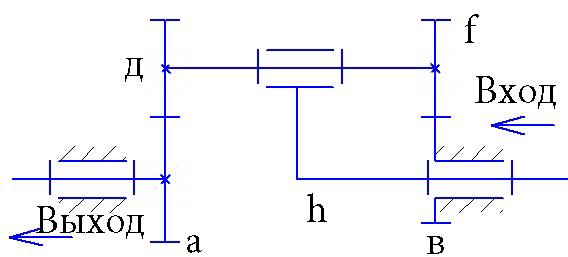
Механизм типа «А» получается из «В» если zд = zf
|
|
|
|
| |
|
| |
|
Здесь КПД выше, чем у механизма с неподвижным водилом |
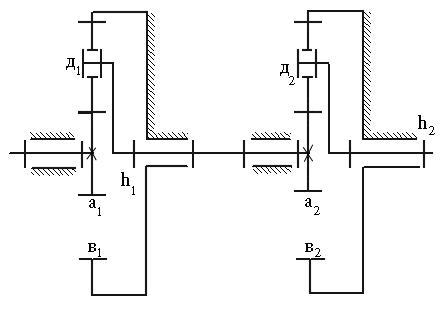
Большого кинематического эффекта при высоком КПД можно достичь последовательным соединением нескольких планетарных передач (например типа «А»)
|
|
|
|
| |
|
|
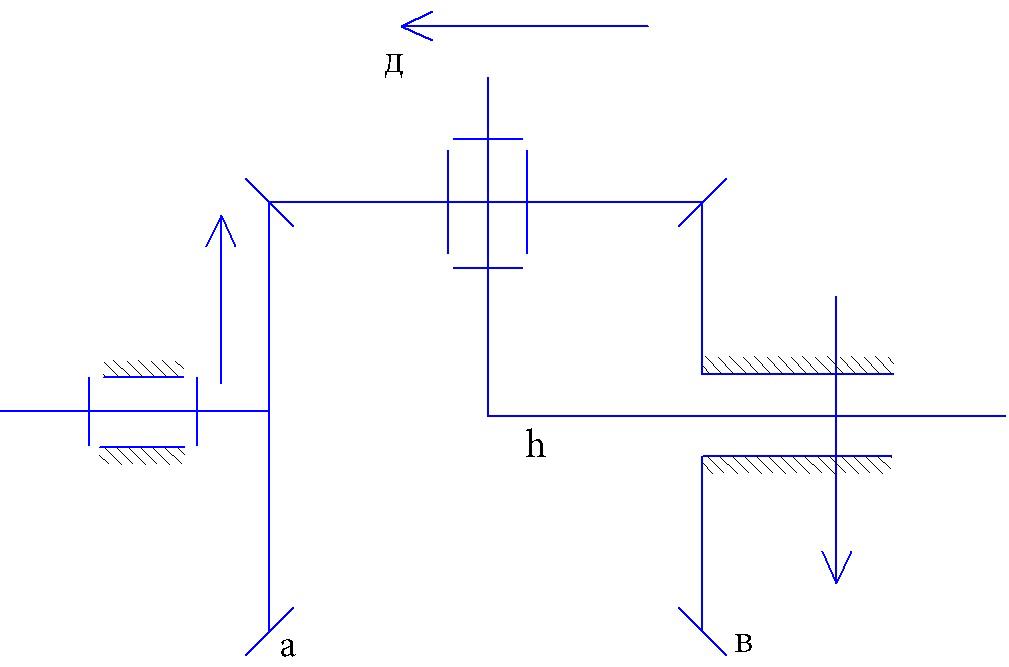
Передача типа «Е» (в данной передаче чаще всего za = zв)
|
|
Широко применяется в дифференциальных механизмах транспортных машин (дифференциал автомобиля) Найдем передаточное отношение при неподвижном водиле (знак находим с помощью правила стрелок) |
|
| |
|
| |
|
|
Механизмы ABD и E относятся к типу (2k-h) т.е. основными звеньями являются 2 центральных колеса и водило h.
Передача 3k (основными звеньями являются 3 центральных колеса а водило не является основным, так как не воспринимает нагрузку от внешних моментов, оно только поддерживает сателлиты)
|
|
Определим число степеней свободы. |
|
ω
=
| |
|
| |
|
|

Очевидно,
что у этой передачи можно получить
большой кинематический эффект за счет
знаменателя (если подбирать числа зубьев
так, чтобы знаменатель → к 0). Реальное
передаточное отклонение
![]()
Широко применяются в планетарных рядах.
О замкнутых планетарных передачах
Для них передаточное отношение определяется их 2-х уравнений
|
|
1)уравнение для планетарной цепи 2)уравнение для замыкающей цепи Решая совместно эти два уравнения получаем конкретное число передаточного отношения |