

Информационные устройства в производстве и бизнесе.
Современный этап развития робототехники определяется исследованиями, направленными на создание, совершенствования и внедрение в производство новых типов роботов – адаптивных, которые принять относить ко второму и третьему поколениям. Особенностью данных роботов является способность функционирования в условия изменения внешней среды.
Непременным условием эффективного функционирования адаптивных роботов является наличие достаточно развитой и совершенной системы очувствления.
Назначением данной системы является сбор информации необходимой для функционирования робота и приведение ее к форме пригодной для использования в системе управления роботом.
Информация – любые сведения о каком-либо событии (объекте). Данное понятие родственно понятию отображения в диалектическом материализме, которое присуще не только объектам, но и процессу.
В робототехнике в системе управления отображаются всевозможные изменения состояния внешней среды, объекта манипулирования, внутреннего состояния робота, задающих сигналов (в самом общем случае в форме всевозможных целеуказаний) на основе чего формируются управляющие сигналы для исполнительных систем (приводов) робота с целью наиболее успешного решения поставленной перед ним задачи.
Это предполагает выполнение как минимум двух функций:
сбор информации и фиксацию ее в определенной форме, т.е. формирование сообщения,
преобразование сообщений в тот или иной вид сигнал и передача его в систему управления. При этом для соответствия между сообщением и сигналом, последний формируется по определенным правилам.
Этот процесс носит название кодирования сообщения.
Реализация данных функций в робототехнических устройствах возлагается на информационную систему, в состав которой входят датчики, своего рода аналоги органов чувств человека, преобразователи сигналов и линии связи.
С точки зрения устойчивости и структуры формируемых и передаваемых сигналов, все информационные системы можно подразделить на сигналами, непрерывные (аналоговые) и дискретные, как по аргументу, так и по значению функции.
Чтобы оценить значение информационной системы в организации эффективного функционирования робототехнических систем рассмотрим роль органов чувств человека в производственной деятельности.
1. Основные понятия, термины, определения.
1.1. Роль органов чувств человека в производственной деятельности.
Чтобы оценить значение информационной системы в организации эффективного функционирования робототехнических систем рассмотрим роль органов чувств человека в производственной деятельности.
Анализ сенсорных систем человека представляет интерес для создателей роботов с точки зрения построения технических систем восприятия по образу и подобию органов чувств животных и человека. Роботы с развитыми сенсорными системами начали создаваться сравнительно недавно, поэтому исследователи попытались копировать самого совершенного "интеллектуального робота"- человека. Для этого необходимо выяснить механизмы получения информации об окружающей среде органами чувств человека.
В таблице 1.1 приведены данные о количестве нейронов, связанные с работой основных органов чувств.
Таблица 1.1
|
Вид восприятия |
Число нейронов |
Процент от общего числа нейронов |
|
Зрение |
2∙108 |
90.6 |
|
Слух |
3∙104 |
0.1 |
|
Осязание тактильное чувство |
5∙104 |
|
|
чувство боли |
3∙104 |
0.3 |
|
чувство тепла |
1∙104 |
|
|
чувство холода |
1∙104 |
|
|
Обоняние |
1∙107 |
4.5 |
|
Вкус |
|
4.5 |
Из таблицы следует, что свыше 90 % всей информации поступает человеку через зрение. Исследования показывают, что глаза производят селекцию информации, отсеивая случайные помехи, шумы и передают в мозг примерно сотую долю получаемой информации. Человеческое зрение обеспечивает восприятие двух смещенных изображений обстановки, отражающих форму предметов, цвет, тени. По этим изображениям человеческий мозг восстанавливает объемную картину, позволяющую решить вопрос о взаимном расположении видимых предметов. Механизм человеческого зрения натолкнул исследователей на мысль об использовании бинокулярных телевизионных систем с триангуляционными методами восстановления объемной картины окружающей среды. В производственной деятельности зрение является важнейшим органом чувств человека.
Важное место в информационном обеспечении человека занимают обоняние и вкус, однако технические аналоги этих органов чувств пока не нашли использования в действующих и проектируемых системах роботов. Очевидно, что это является следствием того, что пока не созданы надежные, быстродействующие, малогабаритные датчики информации о физико-механическом составе жидкостей и газов.
Особое место занимает чувство осязания. Доля информации, обеспечиваемая с помощью осязания, ничтожно мала - всего около 0,3 %, однако, играет немаловажную роль в производственной деятельности. Чувство тепла и холода могут быть использованы для защиты от перегрева и чрезмерного охлаждения при работе в условиях высоких и очень низких температур. Чувство боли может послужить защитой от перенапряжения в аварийных ситуациях.
Для непосредственной производственной деятельности исключительно важную роль играет тактильное чувство. Оно позволяет человеку ощущать контакт с внешним объектом, выполнять сборочные операции, операции со связными объектами. Это чувство позволяет человеку манипулировать самыми различными объектами: от тонких стеклянных предметов до тяжелых и громоздких поковок.
Тактильные рецепторы делятся на две группы. Часть из них находится около поверхности кожи и служит источником информации, другая часть расположена глубоко под кожей и является датчиком нагрузок.
Распределение рецепторов и их соединений с нервными пучками значительно отличается на различных участках кожи. Так, на концах пальцев рук, рецепторов больше, а их соединения обеспечивают разрешающую особенность около 0,1 мм. На других участках разрешающая способность значительно ниже (около 4 мм). Способность человеческих пальцев тонко различать текстуру поверхности предметов связано с особым построением кожи пальцев рук. Сканирование пальцев по поверхности позволяет воспринимать ее шероховатость. К сожалению, в исследованиях тактильного чувства человека остается много неясного, поэтому существующие роботы, снабженные аналогами органов чувств осязания, далеки от человека по способности ж ощущению окружающей среды.
1.2. Принципы построения информационных устройств роботов, классификация датчиков очувствления
Изучение органов чувств человека дает богатейший материал для построения средств очувствления роботов. Однако построение технических систем восприятия по образу и подобию органов чувств животных и человека не дало существенных преимуществ, и исследователи были вынуждены отказаться от идеи непосредственного копирования органов восприятия человека и пойти по пути создания чисто технических систем, ориентированных на выполнение конкретных технологических операций. В истории техники немало примеров, когда попытки человека сделать так, как делает природа, приводили к неудачам. Попытки создать шагающие машины до сих пор не увенчались успехом. Четырех и шестиногие шагающие машины оказались неуклюжими и медлительными, не способными сохранять устойчивость даже на слабопересеченной местности. В то же время первый автомобиль появился в прошлом веке, а самодвижущиеся тележки на колесном ходу еще раньше. Ничего похожего на колесо в естественной природе не известно. Аналогичная картина наблюдается и при создании роботов: максимальных успехов удалось достичь с использованием чисто технических систем. Технические системы (лазерные: ультразвуковые, радиолокационные и др.) позволяют измерять с высокой точностью расстояния до отдельных точек поверхности объектов, датчики инфракрасного излучения позволяют роботу ориентироваться в полной темноте.
Под информационным обеспечением робототехнических систем понимают совокупность датчиков внешней и внутренней информации, а также устройств ее предварительной обработки для принятия решений об изменении движений или действий робота. Информационные системы в значительной мере определяют функционирующие возможности роботов, сложность решаемых роботами задач, предопределяет адаптивные возможности робототехнических систем, эксплуатационную надежность и эффективность их использования в производственных условиях. В зависимости от функционального назначения и принципа действия, характера решаемых задач информационные системы могут быть условно разделены так, как показано на рис 1.1. Очевидно, что иерархический уровень системы управления определяет использование соответствующих информационных устройств, поэтому верхний уровень классифицирует информационные устройства по назначению. Следующий уровень классификаций разделяет информационные устройства по функциональному принципу сбора и обработке информации. Нижний уровень классифицирует информационные устройства по принципу действия или назначению в пределах данного класса.
Все информационные устройства можно разделить на две больше группы: датчики внутренней и внешней информации. Датчики внутренней информации это традиционные датчики исполнительных систем: датчики тока, напряжения, скорости и положения (углового или линейного), крутящего момента» Они используются для обеспечения функциональных возможностей и требуемых показателей качества систем управления на исполнительном уровне.
Датчики внешней информации используются в основном в системах управления более высоких уровней: тактическом, стратегическом. Они обеспечивают функциональные возможности не отдельной исполнительной системы, одной степени подвижности, а робота в целом. По наличию или отсутствию датчиков внешней информации можно судить об адаптивных возможностях робота в целом. Датчики внешней информации можно разделить на следующие 2-е группы:
- датчики, применяемые в системах управления тактического уровня управления,
- датчики, применяемые в системах стратегического уровня управления.

Каждая группа имеет свой принцип действия, свой информационный признак, свои алгоритмы обработки информации и свое назначение в контуре управления робототехническими системами.
ИС характеризуются большим разнообразием датчиковой аппаратуры (часто в литературе встречается другое их название – первичные преобразователи), которые строятся на различных физических и структурных принципах.
В свези с этим классификацию ИС часще удобнее проводить по различию применяемых в них датчиков.
Существующие типы датчиков можно классифицировать по различным признакам основными из которых являются следующие (см. таблицу).
Датчики с последовательным преобразованием имеют следующую схему:

ЧЭ – Чувствительный элемент,
УПЗ – усилительно-преобразующее звено,
ВУ – выходное устройство является согласующим элементам с входным устройство СУ станка или робота.
Преимущества: простота, надежность.
Недостатки:
1) наличие ничем не скомпенсированных погрешностей мультипликативных – за счет нестабильности чувствительности узлов датчика (внутренние), и аддитивные – за счет действия внешних возмущений.
2) и как следствие этого низкая точность измерений.
Датчики с дифференциальной схемой измерений характеризуются наличием двух последовательных измерительных цепочек:

ОС – орган сравнения,
ПрП – промежуточный преобразователь.
ОС настраивается таким образом, чтобы в нем полезные сигналы суммировались, а помехи вычитались.

Преимущества:
1) возможность компенсации постоянных составляющих сигнала и ряда аддитивных погрешностей и за счет этого более высокая
2) точность измерений,
3) линейность выходной характеристики,
4) чувствительность.
Компенсационные датчики, характеризуются наличием цепи обратной связи ЦОС.

ЦОС – цепь обратной связи.
Выходной сигнал органа сравнения определяется выражением:

Здесь ЦОС формирует компенсирующий сигнал U5
В органе сравнения (ОС) измеренный и преобразованный параметр “X” сравнивается с компенсирующим сигналом U5
Разностный сигнал поступает через промежуточный преобразователь в выходное устройство (ВУ).
Преимущества:
здесь осуществляется компенсация мультипликативных погрешностей. При этом точность измерений определяется в основном стабильностью параметров ЦОС.
высокая линейность выходной характеристики.
возможность существенного усиления входного сигнала как по амплитуде так и по мощности.
Недостатки:
относительно сложная конструкция.
влияние на результат измерений аддитивных погрешностей.
1.3. Требования к датчикам очувствления, их метрологические характеристики.
Как следует из приведенной классификации ИУ строятся на разных физических и структурных принципах. При этом используется огромное число конкретных схематических решений.
Вместе с тем как уже говорилось в конструкции любого датчика можно выделить два основных узла:
это относительно простой, насколько это возможно из условия обеспечения заданной точности, электромеханический первичный преобразователь, непосредственно воспринимающий контролируемый параметр,
и электронный блок, обрабатывающий полученную информацию и представляющий ее в требуемой форме.
Электромеханический преобразователь как правило является прецизионным устройством и должен удовлетворять самым разнообразным и очень высоким техническим требованиям. К их числу в первую очередь относятся следующие:
высокая точность;
быстродействие;
низкое энергопотребление;
устойчивость к эксплуатационным факторам;
высокая надежность;
технологичность;
малогабаритность и простота конструкции;
хорошая встраиваемость (прежде всего для МР);
отсутствие вредных воздействий на человека и простота обслуживания;
высокая перегрузочная способность;
избирательность к внешним воздействиям;
высокая помехоустойчивость;
обеспечение заданных метрологических характеристик;
унифицированность и взаимозаменяемость;
и т.д.
Следует отметить, что диапазон этих требований настолько широк, что существенно усложняет выполнение последнего из перечисленных, а именно унификации конструкций и взаимозаменяемости датчиков.
Это усугубляется так же и тем, что датчики обычно работают по разомкнутой схеме, что создает серьезные трудности по последующей корректировке выдаваемой информации. Это предъявляет к таким изделиям дополнительные требования по достоверности выходной информации.
В связи с этим на сегодняшний день унификация конструкций датчиков является организационно – технической задачей первостепенной важности.
Метрологические характеристики датчиков.
Метрологические характеристики являются важнейшими показателями пригодности датчиков для эксплуатации в составе того или иного устройства. Остановимся на основных из них.
Статическая характеристика датчика или его функция преобразования это функциональная зависимость выходной величины от входной. Статическая характеристика может быть представлена аналитически, таблично или графически. Обычно стремятся получить линейную характеристику. Для описания линейной статической характеристики α=φ(x)=α0 +SΔx достаточно двух параметров, начального значения выходной величины α0, соответствующего нулевому значению входной величины x, и показателей относительного наклона характеристики называемого чувствительностью датчика.
Статическая чувствительность - это отношение малых приращений выходной величины к соответствующим приращениям входной, т.е. в пределе - производная

Размерность чувствительности определяется размерами выходной и входной величин, например, для датчика усилий единица чувствительности - Н/В, а для датчика момента - Н∙м/В,
В динамике под чувствительностью подразумевается отношение скоростей изменения выходной и входной величин

Порог чувствительности датчика - минимальное изменение измеряемой величины, вызывающее изменение выходной.
Динамический диапазон датчика - отношение предела измерений к порогу чувствительности
Номинальная статическая характеристика - усредненная статическая характеристика серии однотипных датчиков, приводимая в технической документации этой серии.
Погрешности датчика бывают статическими и динамическими.
Статические погрешности датчика можно рассматривать как разность между номинальной и реальной статическими характеристиками. Различают систематические, прогрессирующе и случайные погрешности датчиков.
Систематическая погрешность является не изменяющимися во времени функциями тех или иных параметров. Эта погрешность может быть устранена внесением соответствующих поправок. Систематические погрешности трудно выявляемы, обычно их можно обнаружить лишь путем поверки с помощью образцовых средств.
Прогрессирующие погрешности - это погрешности, медленно изменяющиеся во времени. Они чаще всего связаны с процессами старения компонентов датчика. Для повышения точности датчика необходима передаточная коррекция прогрессирующих погрешностей.
Случайными называются погрешности, в появлении и изменении которых не удается установить какой-либо закономерности. Они определяются сложной совокупностью причин, трудно поддающихся анализу. Наличие случайных погрешностей легко обнаружить по разбросу результатов многократных измерений одного и того же значения контролируемой физической величины. Эти погрешности характеризуются типом случайного закона распределения и его параметрами. Основным способом повышения точности измерений является многократное повторение измерений и осреднение результата.
При метрологическом анализе датчиков в динамике основным параметром является динамическая погрешность, т.е. мгновенная разность между значением входной величины, рассчитанным по соответствующему значению выходной с помощью номинальной статической характеристики, и истинным значением входной величины в данный момент времени. По уравнению динамической погрешности и ее максимальному допустимому значению для конкретного датчика можно определить предельные параметры измеряемой величины.
Динамическая функция преобразования датчика определяет значения выходной величины при быстрых изменениях входной. Динамическая функция может выражаться дифференциальным уравнением, связывающим входную и выходную величины, импульсной и переходной характеристиками, передаточной функцией, совокупностью амплитудно- и фазо-частотных характеристик.
Информационные устройства систем исполнительного
уровня управления.
Датчики скорости.
Тахогенераторы (ТГ) постоянного тока.
Тахогенераторы постоянного тока – это небольшие генераторы постоянного тока с возбуждением от постоянных магнитов, с независимым возбуждением. Конструктивно они не отличаются от обычных машин постоянного тока малой мощности. Рассмотрим принцип действия машин постоянного тока с независимым возбуждением. Машина постоянного тока имеет обмотку возбуждения расположенную на явно выраженных полюсах статора.

1.-обмотка возбуждения
2.-главные полюсы
3.-якорь
4.- обмотка якоря
5.-щетки
6.-корпус

По обмоткам возбуждения проходит постоянный ток I6, которое создает магнитное поле возбуждения Ф6 (по правилу буравчика).
На роторе расположена обмотка, в которой при вращении ротора индуктируется ЭДС. Таким образом ротор машины постоянного тока является якорем.
При заданном направлении вращения якоря направление ЭДС, индуктируемой в его пров-ках, зависит только от того, под каким полюсом находится проводник. Поэтому во всех проводниках расположенных под одним полюсом, направление ЭДС одинаковое и определяется по правилу правой руки.
При вращении якоря проводники обмотки перемещаются от одного полюса к другому; ЭДС, индуктируемая в них, меняет знак, т.е. в каждом проводнике наводится переменная ЭДС. Однако количество проводников, находящийся под каждым полюсом, остается неизменным. При этом суммарная ЭДС, индуктируемая в проводниках, находящийся под одним полюсом, так же неизменна по направлению и постоянна по величине. Эта ЭДС снимается с обмотки якоря при помощи скользящего контакта. Обмотка якоря выполняется замкнутой. При отсутствии внешней нагрузки ток по обмотке не проходит, т.к ЭДС, индуктируемые в различных частях обмотки взаимно компенсируются.

Если щетки, осуществляющие скользящий контакт с обмоткой якоря, расположить на геометрической нейтрали, то при Rн=00 к щекам будет приложено напряжение Е, равное ЭДС, индуктированной в каждой из половин обмоток. Это напряжение практически неизменно, хотя и имеет некоторую переменную составляющую. При большом количестве проводников пульсации напряжения незначительны. При подключении Rн через обмотку будет проходить постоянный ток, направление которого определяется направлением ЭДС Е. Для обеспечения токосъема, щетки скользят не по проводникам обмотки якоря (как это было на заре электромашиностроения), а по коллектору, выполненному в виде цилиндра, который набирается из медных пластин, изолированных одна от другой. К каждой паре соседних коллекторных пластин прис –ся часть обмотки якоря, состоящего из одного или нескольких витков. Эта часть называется секцией обмотки якоря. Если машина работает в генераторном режиме, то коллектор со щетками является механическим выпрямителем.
ТГ с возбуждением от постоянных магнитов работают аналогично, только вместо обмотки возбуждения используются постоянные магниты.
ТГ предназначены для преобразования механического вращения в электрический сигнал.
Основные требования: - линейность выходной характеристики - большая крутизна выходной характеристики - минимум пульсаций напряжения на коллекторе - минимум зоны нечувствительности Выходная характеристика – зависимость U=f (n) U=f (w)
Для обеспечения линейности должна быть сохранена строгая пропорциональность между выходным напряжением U и скоростью вращения.

U
= C1n
или U=
kw
=k
C1 и k - крутизна выходной характеристики, представляет собой
C1
=
При
х.х. т.е. когда Rн
=

Ея = СnФв = СIn
Фв – магнитный поток возбуждения
С – постоянная Т Г:
С = Р/60*N/a
Р- число пар полюсов
N – число проводников обмотки якоря
а – число пар ветвей
При нагрузке напряжения на зажимах уменьшается на величину падения напряжения на обмотке:
U = Eя – Iя Rя (1)
где = U/Rн;
Rн – сопротивление нагрузки
Подставив Iя в выражение (1) получим
U
= Eя
– U отсюда U
=
отсюда U
=
Чем больше С, Фв, Rн и меньше Rя тем больше крутизна. Нагрузка не влияет на линейность, а влияет только на крутизну.

Однако практически выходная характеристика отклоняется от линейной из-за намагничивающей силы реакции якоря, ослабляющий поток возбуждения Фв.
При подключении Rн в обмотке якоря течет ток, который создает свой собственный магнитный поток Фр, который направлен встречно магнитному потоку возбуждения Фв. Воздействие магнитного поля якоря на основное возбуждения называется реакцией якоря. Тогда результирующий поток
Ф
= Фв-Фр.

Здесь
Фр= С1 Iя
= С1( )
С1- коэффициент пропорциональности
)
С1- коэффициент пропорциональности
Итак:
1.
 =
∞⟶
=
∞⟶
 =
0,
=
0, =
0⟶
=
0⟶
 =
= -
выходная характеристика линейна
-
выходная характеристика линейна
2.При
уменьшении
 ,
, ↑,
↑, ↑
иU=f
(n)
отличается от линейной, т.к U
уменьшается
↑
иU=f
(n)
отличается от линейной, т.к U
уменьшается
3.
При увеличении n,
U↑
следовательно ↑ =
= что приводит к ↑
что приводит к ↑ и уменьшениюU.
и уменьшениюU.
Т.е
с уменьшением
 и ↑n
выходная характеристика отклоняется
от линейного закона.
и ↑n
выходная характеристика отклоняется
от линейного закона.
Точнее
формула следующая U=
Другая
погрешность – наличие щеточного контура
(т.е передаточного контура между
коллектором и щетками), обуславливающего
 :
:
Падение
напряжения на щеточном контакте
 =
=
 =const
=const
Если не учитывать реакцию якоря, то
U=


Т.е
напряжение на щетках появляется не при
n=0,
а при некотором значении скорости когда
 >
> вследствие чего появляется зона
нечувствительности, в пределах которой
на вых. вращающегося ТГ напряжение =0.
вследствие чего появляется зона
нечувствительности, в пределах которой
на вых. вращающегося ТГ напряжение =0.
Напряжение на выходе ТГ имеет пульсации:
1.Зубцовые пульсации, обуславливается зубцовым строением якоря, вследствие пульсации магнитной проводимости воздушного зазора
2. Якорные пульсации – обуславливается изменением магнитного потока за время одного оборота вследствие эллиптичности, эксцентриситета якоря или магнитной анизотропии его материала.
3. Коллекторные пульсации – периодичное изменение числа секций в параллельных ветвях якоря, вибраций щеток и замыканием накоротко части секции при коммутации.

Передаточная функция ТГ
Если пренебречь размагничивающим действием реакции якоря, то уравнение для якорной цепи ТГ в переходном режиме имеет вид:
 (1)
(1)
Где
 ,
, -
статический коэффициент передачи ТГ
или нагрузка выходной характеристики
наxα.
-
статический коэффициент передачи ТГ
или нагрузка выходной характеристики
наxα.
 -
индуктивность и омическое сопротивление
обмотки якоря
-
индуктивность и омическое сопротивление
обмотки якоря
 -
ток якоря
-
ток якоря
Если
к ТГ подключено активное сопротивление
нагрузки
 ,
то ток якоря:
,
то ток якоря:
 =
= (2)
(2)
производная
тока:
 (3)
(3)
Подставив (2) и (3) в уравнение (1) получим:
 (4)
(4)
Эквивалентная схема

или
 (5)
(5)
где
Т = ;
; =
=
Т - постоянная времени якорной цепи
 -
статический коэффициент передачи ТГ
при нагрузке
-
статический коэффициент передачи ТГ
при нагрузке
Изображение по Лапласу (при нулевых начальных условиях) для уравнения (5) имеет вид

Отсюда передаточная функция ТГ:
 (6)
(6)
т.о если входным параметром является угол поворота вала, то ТГ представляет собой инерционное (реальное) дифференцирующее звено.
Обычно
у ТГ
 -
мало, а
-
мало, а -
велико, тогда Т – мало и его можно не
учитывать, то
-
велико, тогда Т – мало и его можно не
учитывать, то
 ;
;
т.е идеальное (безынерционное) дифференцирующее звено.
Если входным параметром является угловая скорость поворота вала, то

или без учета Т :

Применение ТГ в системах автоматического управления
В замкнутой системе регулирования ТГ является основным звеном контура обратной связи по скорости вращения.
ТГ
предназначен для того, чтобы обеспечить
скорость вращения (или перемещения) ИМ
пропорциональной сигналу задания
 .
Для этого напряжение проступающие с
ТГ сравнивается в устройстве сравнения
УС с напряжением задания и их разность
подается на усилитель. У – предварительный
усилитель, УМ – усилитель мощности
(современные тиристорные или транзисторные
преобразователи) , к которому подключен
двигатель. Чем выше коэффициент усиления
по напряжению У и коэффициент усиления
по мощности УМ, тем меньше будет разность
напряжения
.
Для этого напряжение проступающие с
ТГ сравнивается в устройстве сравнения
УС с напряжением задания и их разность
подается на усилитель. У – предварительный
усилитель, УМ – усилитель мощности
(современные тиристорные или транзисторные
преобразователи) , к которому подключен
двигатель. Чем выше коэффициент усиления
по напряжению У и коэффициент усиления
по мощности УМ, тем меньше будет разность
напряжения ,
чтобы обеспечить заданную скорость
вращения двигателя и тем точнее будет
поддерживаться пропорциональность
между скоростью вращения и напряжением
,
чтобы обеспечить заданную скорость
вращения двигателя и тем точнее будет
поддерживаться пропорциональность
между скоростью вращения и напряжением .
.

Тахогенераторы переменного тока.
В замкнутой системе регулирования ТГ является основным звеном контура обратной связи по скорости вращения.
ТГ
предназначен для того, чтобы обеспечить
скорость вращения (или перемещения) ИМ
пропорциональной сигналу задания
 .
Для этого напряжение проступающие с
ТГ сравнивается в устройстве сравнения
УС с напряжением задания и их разность
подается на усилитель.
Бывают двух типов:
.
Для этого напряжение проступающие с
ТГ сравнивается в устройстве сравнения
УС с напряжением задания и их разность
подается на усилитель.
Бывают двух типов:
- синхронные
- асинхронные
Преимуществом ТГ переменного тока является отсутствие коллектора и щёток.
Синхронные ТГ
Состоит из неподвижного статора 2, в пазах которого размещена обмотка 3. Якорь 1 представляет собой постоянный магнит с несколькими полюсами.
При вращении якоря (постоянного магнита) в обмотке статора наводится переменная э.д.с. Э.Д.С имеет синусоидальную форму, с амплитудой и частотой пропорциональной скорости вращения якоря.

Временные диаграммы изменения выходного сигнала тахогенератора приведены на рисунке.
Из временных диаграмм следует:
При n=0
 =0
=0n=
 и
n=2
и
n=2
При увеличении скорости вращения якоря в два раза
- амплитуда выходного напряжения увеличилась в два раза,
- частоты выходного напряжения увеличилась в два раза.
Поэтому синхронный ТГ не получил большого распространения:
- частота выходного напряжения зависит от скорости вращения якоря
- при изменении направления вращения якоря фаза выходного напряжения не меняется, т.е ТГ нечувствителен к изменению направления вращения.
Синхронные ТГ используются лишь в качестве индикаторных тахометров для непосредственного измерения скорости вращения различных механизмов.
Выходное напряжение при этом выпрямляется выпрямителем.

Временные диаграммы изменения выходного сигнала синхронного тахогенератора.
Асинхронный ТГ.
Конструктивно подобен двухфазному асинхронному двигателю с тонкостенным полым немагнитным ротором

На рисунке обозначено:
1- внешний статор
2- внутренний статор
3- ротор, выполненный в виде полого немагнитного цилиндра
4- корпус
Статоры 1 и 2 (как и в любой электрической машине) набираются из изолированных друг от друга листов электротехнической стали.
В пазах статора 1 располагаются 2 обмотки:
- обмотка возбуждения ОВ; подключена к сети;
- обмотка генераторная ОГ или выходная с которой снимается выходное напряжение;
ОВ и ОГ изолированы друг от друга либо соединенным по мостовой схеме и сдвинуты в пространстве на угол 90˚.
Статор 2 служит для уменьшения магнитного сопротивления на пути основного (рабочего) магнитного потока, проходящего через воздушный зазор.
Полный ротор 3 выполняется в виде тонкостенного стакана из немагнитного материала – чаще всего из сплавов алюминия.
Ас. ТГ в зависимости от расположения обмоток делятся:
- с обмотками только на внешнем статоре;
- с обмотками только на внутреннем статоре;
- с одной обмоткой на внешнем, с другой – обычной обмоткой возбуждения – на внутреннем статоре;
Принцип действия тахогенератора состоит в следующем.
Переменный
ток возбуждения создает пульсирующий
поток
 ,
который, пересекая полный ротор, наводит
в нем э.д.с трансформаций контуры токов
ротора от этой э.д.с., располагаются в
плоскостях, перпендикулярных потоку
возбуждения
,
который, пересекая полный ротор, наводит
в нем э.д.с трансформаций контуры токов
ротора от этой э.д.с., располагаются в
плоскостях, перпендикулярных потоку
возбуждения .
Эти токи создают магнитный поток ротора
.
Эти токи создают магнитный поток ротора ,
направленный навстречу потоку возбуждения.
Разность этих потоков Ф=
,
направленный навстречу потоку возбуждения.
Разность этих потоков Ф= -
- образует результирующий
образует результирующий
продольный поток, который при неподвижном роторе не наводит э.д.с. в генераторной обмотке ОГ, поэтому выходное напряжение =0.
При вращении стенки полого ротора пересекают результирующий поток Ф:
Ф= -
-
и в них, кроме э.д.с трансформации, наводится еще э.д.с вращения.
Под
действием э.д.с. вращения по ротору
протекают токи, контуры которых при
большом активном сопротивлении ротора
практически совпадают с осью потока
возбуждения
 .
Эти токи создают магнитный поток ротора
.
Эти токи создают магнитный поток ротора ,
который
направлен по поперечной оси ТГ. Магнитный
поток
,
который
направлен по поперечной оси ТГ. Магнитный
поток
 наводит
в ОГ э.д.с
наводит
в ОГ э.д.с
 .
.
Т.к
поток
 изменяется с частотой сети, то и частота
выходного э.д.с. равна частоте сети и не
зависит от скорости вращения ротора.
изменяется с частотой сети, то и частота
выходного э.д.с. равна частоте сети и не
зависит от скорости вращения ротора.


Выходная Э.Д.С пропорциональна скорости вращения:
 или
или

 -
угловая скорость вращения вала, равная
первой производной от α.
-
угловая скорость вращения вала, равная
первой производной от α.
 -
коэффициент передачи.
-
коэффициент передачи.
Передаточная функция ТГ:

если за каждую величину принята угловая скорость вращения ротора.

Т= - определяется в основном скоростью
протекания электромагнитных процессов,
т.е активным и реактивным сопротивлением
машины и нагрузки
- определяется в основном скоростью
протекания электромагнитных процессов,
т.е активным и реактивным сопротивлением
машины и нагрузки
 ;
;

Если за входящую величину принять угол поворота ротора, то передаточная функция представляет идеальное дифференцирующее звено:

Выходные
напряжения
 меньше
меньше на величину падения напряжения в
генераторной обмотке
на величину падения напряжения в
генераторной обмотке

 -
ток в генераторной обмотке
-
ток в генераторной обмотке
Зависимость
 называется выходной характеристикой
асинхронного ТГ.
называется выходной характеристикой
асинхронного ТГ.
Отклонение
реальной от идеальной называется
амплитудной (скоростной) погрешностью
 .
.
При изменении направления вращения ротора АС ТГ меняется фаза выходного сигнала на 180˚ по отношению к фазе ОВ. Однако здесь также существует погрешность.
Осцилограммы выходного сигнала асинхронного тахогенератора для различных скоростей вращения ротора имеют следующий вид:

Выходная характеристика представлена на рисунке

1-реальная выходная хар-ка
2- идеальная выходная хар-ка
Недостатки асинхронного ТГ.
1.Фаза
выходного напряжения не совпадает с
фазой ОВ и не остается постоянное при
изменении скорости вращения. Отклонение
 называется фазовой
называется фазовой погрешностью ТГ.
погрешностью ТГ. отрицательна при низших и положительных
при высоких скоростях вращения.
Определяется индуктивным сопротивлением
ротора и обмоток статора.
отрицательна при низших и положительных
при высоких скоростях вращения.
Определяется индуктивным сопротивлением
ротора и обмоток статора.
2.
Другим недостатком является зависимость
амплитуды и фазы
 от величины и характера нагрузки
от величины и характера нагрузки .
Активная и индуктивная нагрузки снижают
.
Активная и индуктивная нагрузки снижают ,
а емкостная увеличивают. Следовательно,
меняется крутизна выходной характеристики.
,
а емкостная увеличивают. Следовательно,
меняется крутизна выходной характеристики.
3.
Следующим существенным недостатком
Ас.ТГ является несимметричность выходной
характеристики: напряжение
 при вращении в противоположных
направлениях имеет различную величину.
при вращении в противоположных
направлениях имеет различную величину.
В
основном несимметричность выходной
характеристики объясняется нулевой
(остаточной) э.д.с
 ,
т.е э.д.с наводимой в ОГ при неподвижном
роторе.
,
т.е э.д.с наводимой в ОГ при неподвижном
роторе.
Причины:
а).
Теоретически при
 =0
⟶
=0
⟶ =0
, т.к обмотки В и Г𝑤
=0
, т.к обмотки В и Г𝑤 и 𝑤
и 𝑤 должны иметь пространственный сдвиг
друг относительно друга на 90˚. Однако
он отличается от 90˚;
должны иметь пространственный сдвиг
друг относительно друга на 90˚. Однако
он отличается от 90˚;
б). несимметрия магнитной цепи ( неравенство магнитных проводимостей в различных радиальных направлениях);
в). неравномерность воздушного зазора;
г). неодинаковая толщина стекол стакана ротора;
Нулевая или остаточная Э.Д.С имеет постоянную и переменную составляющие

 3÷7
мВ
3÷7
мВ
 25-100
мВ
25-100
мВ
Для
уменьшения
 ОВ и ОГ размещают на разных статорах –
одну на внешнем, другую на внутреннем.
При сборке ТГ внутренний статор
поворачивают, находят положение при
котором
ОВ и ОГ размещают на разных статорах –
одну на внешнем, другую на внутреннем.
При сборке ТГ внутренний статор
поворачивают, находят положение при
котором близко к нулю.
близко к нулю.
4. малая выходная мощность при значительных габаритах и массе;
Достоинствами асинхронного ТГ с полым ротором является:
- бесконтактность,
-малая инерционность,
-высокая надежность,
-незначительный момент сопротивления.
Диапазон измеряемых скоростей: 0÷10000 об/мин
Если к ОВ подвести не переменное, а постоянное напряжение, то Э.Д.С на выходе ТГ пропорциональна ускорению

1)
Если
 =const,
то поток возбуждения
=const,
то поток возбуждения
 постоянен,
э.д.с вращения в роторе
постоянен,
э.д.с вращения в роторе =
=
 =const,
то и ротор const;
и поток
=const,
то и ротор const;
и поток
 ,
наводимый током постоянный.
,
наводимый током постоянный.
след-но э.д.с в ОГ не наводится
 =
-𝑤
=
-𝑤
 q
= 0
q
= 0
2)
Скорость вращения переменная
 =var
=var
Э.Д.С
вращения в роторе
 =
=
 пропорциональна
пропорциональна ;
ток ротора и возбуждаемый им поток
ротора
;
ток ротора и возбуждаемый им поток
ротора также
пропорциональны
также
пропорциональны .
Следовательно, в ОГ наводится э.д.с
пропорциональный скорости
.
Следовательно, в ОГ наводится э.д.с
пропорциональный скорости :
:
 =
-𝑤
=
-𝑤
 q
= ±
q
= ±
или

т.е. асинхронный ТГ в этом режиме является датчиком ускорений.
Способы компенсации погрешностей отображения:
1.Компаундирование нагрузки емкостными и индуктивными сопротивлениями
2.Повышение синхронной скорости вращения
3.Увеличение активного сопротивления ротора (фосфористая бронза)
Способы компенсации остаточной Э.Д.С.:
1.Размещение ОВ и ОГ на разных статорах и регулировка машины при ее сборке
2.Повышение точности изготовления и сборки (большие технологические трудности).
Датчики положения.
Предназначены для измерения угловых и линейных перемещений рабочих органов машин.В машиностроении наиболее широкое применение нашли электромашинные и фотоэлектрические датчики положения.
Электромашинные датчики положения.
Сельсины
Сельсины-индукционные электрические машины переменного тока синхронной связи. Служат для синхронного и синфазного поворота или вращения двух или несколько осей, механически не связанных между собой.
Устройство
Имеют 2 обмотки:
-первичную или обмотку возбуждения;
-вторичную или обмотку синхронизации.
Зависимости от числа фаз обмотки возбуждения различают одно и трехфазные сельсины; обмотка синхронизации в обоих типах сельсинов выполняется по типу трёхфазной.
Трёхфазные сельсины имеют такую при конструкции, как трёхфазные асинхронные двигатели с контактными кольцами на роторе; их применяют только в системе электрического вала.
В системах автоматизации используют однофазные контактные и бесконтактные сельсины.
Принцип действия сельсина не зависит от места расположения каждой из обмоток. Однако чаще всего в сельсинах обмотку синхронизации размещают на статоре, а обмотку возбуждения - на роторе (для уменьшения количества контактных колец и повышения надёжности работы).
Однофазные контактные сельсины аналогичны асинхронным машинам малой мощности.
Они могут быть: - явнополюсными (индикаторными);
- неявнополюсными (трансформаторные).
Обмотка синхронизации всегда выполняется распределённой. Фазы соединяют в звезду
Недостатком контактных сельсинов является наличие скользящих контактов, переходное сопротивление которых меняется. Это снижает надёжность и приводит к увеличению погрешностей.
В явнополюсных бесконтактных системах обмотка синхронизации и обмотка возбуждения расположены на статоре. Магнитный поток создаваемый обмоткой возбуждения замыкается через ротор. При повороте ротора изменяется положение оси магнитного потока относительно обмоток синхронизации, поэтому ЭДС , индуктируемая в фазах обмотки синхронизации зависит от угла поворота ротора.



На приведенных рисунках обозначено 1-статор, 2-обмотка
статора, 3-ротор, 4-обмотки ротора.

В системах синхронной связи, работающих на повышенной частоте (400-1000 Гц), применяют неявнополюсные бесконтактные сельсины с кольцевым трансформатором. В этих сельсинах обмотка синхронизации расположена в позах статора, а обмотки возбуждения подается посредством кольцевого трансформатора, смонтированного в общем корпусе с сельсином. Такой сельсин подобен контактному сельсину, но вместо колец и щеток в нём примем кольцевой трансформатор.
Работа сельсинов в индикаторном режиме.
Целью является передача угла на расстояние при незначительном моменте сопротивления приёмника. В этом режиме сельсин-приёмник (СП) самостоятельно отрабатывает угол, задаваемый сельсином-датчиком (СД), не требуя дополнительных усилительных и исполнительных устройств.

Принцип действия всех сельсинов одинаков. Рассмотрим однофазные сельсины с обмоткой возбуждения на статоре.
Индикаторный режим заключается в следующем: если повернуть ротор СД на угол α, то ротор СП сам повернётся примерно на тот угол α' и в ту же сторону. Разность α- α'=0, называется углом рассогласования или ошибочной в повороте. Системы с индикаторными передачами называется дистанционными.
Пологая, что
-распределение индукции вдоль воздушного зазора синусоидальное.
-машина не насыщена
-магнитный поток имеет постоянную величину можно считать, что действующие значения ЭДС, наводимых потоком возбуждения в обмотках ротора, являются синусоидальными функциями угла поворота ротора.
При повороте ротора СД на угол α в его обмотках наводятся ЭДС:



где
 - максимальное значение ЭДС в обмотке,
которое наводится при α=0:
- максимальное значение ЭДС в обмотке,
которое наводится при α=0:

F-частота питающей сети,
ω, -число
витков и обмоточный коэффициент обмотки
ротора,
-число
витков и обмоточный коэффициент обмотки
ротора,
 -максимальное
значение потока возбуждения.
-максимальное
значение потока возбуждения.
Приёмник повернётся на угол α', ЭДС в его обмотках:
 '
'


Т.к одинаковые обмотки СД и СП включены встречно, то между одноимёнными концами обмоток действуют разностные ЭДС:
 =…
=…



Обозначив через Z сопротивление фазной обмотки сельсина и пренебрегая сопротивлением проводов связи, найдём токи датчика и приёмника:



Алгебраическая сумма токов:
 0
0
Проходя по трём роторным обмоткам сельсина, сдвинутым в пространстве на 120˚ друг относительно друга токи создают три намагничивающие силы сдвинутые в пространстве на 120˚:



Геометрическая сумма их в пространстве даёт результирующую Н.С. направление которой зависит от положения ротора. Результирующая Н.С. Имеет 2 составляющие:
-продольную
 ,
направленную вдоль оси обмотки
возбуждения;
,
направленную вдоль оси обмотки
возбуждения;
-поперечную
 ,
направленную перпендикулярно к ней.
,
направленную перпендикулярно к ней.
Синхронизирующий
момент СП (т.е. момент, стремящийся
повернуть ротор СП с угла α' на α, т.е.в
согласованное с ротором СД состояние)
создаётся в результате взаимодействия
поперёчной составляющей Н.С. с потоком обмотки возбуждения. Продольная
составляющая
с потоком обмотки возбуждения. Продольная
составляющая в создании этого момента не участвует.
в создании этого момента не участвует.
Для сельсина - приёмника:

Подставляя
 выражение через токи, получим:
выражение через токи, получим:

Синхронизирующий
момент пропорционален
 :
:

Т.о.
зависимость статического синхронизирующего
момента
 от угла рассогласования 0 носит
синусоидальный характер.
от угла рассогласования 0 носит
синусоидальный характер.

Причём
при повороте ротора до 180˚(т.А, А') сельсин
находится в устойчивом состоянии
равновесия, т.к. стремится вернуть ротор начальное
установившееся состояние т.е. уменьшить
0. При 0 > 180˚ СП находятся в неустойчивом
положении равновесия, т.е. СП стремится
увеличить угол 0.
стремится вернуть ротор начальное
установившееся состояние т.е. уменьшить
0. При 0 > 180˚ СП находятся в неустойчивом
положении равновесия, т.е. СП стремится
увеличить угол 0.
Мы рассматривали статический индикаторный режим (Ω=0).
Сельсины могут работать в динамическом режиме:
-Ω=const-при равномерном вращении (равномерной заводки);
-Ω=var-при неравномерном вращении.
Тогда динамический момент:

C
увеличением частоты питающий сети f
 возрастает. Как правило для возбуждения
сельсинов используются напряжения с
частотами f=50,400,500,1000 Гц.
возрастает. Как правило для возбуждения
сельсинов используются напряжения с
частотами f=50,400,500,1000 Гц.
Работа сельсинов в трансформаторном режиме.
Принимается для измерения углового положения. Напряжение возбуждения подаётся на сельсин-датчик, а выходное напряжение снимается со статорной обмотки сельсина- приёмника. При трансформаторном режиме от СД к СП передаётся незначительный по мощности сигнал. Поэтому при использовании в системах автоматического управления сигнал от СП усиливается, затем преобразовывается и подаётся на двигатель.
Схема включения сельсинов имеет следующий вид (см. рисунок)
При повороте ротора СД на угол 0 обмотки 1,2 и 3 смещаются относительно оси 0 возбуждения. Тогда ЭДС в обмотках:



Токи:



Каждый из токов создаёт в СП намагниченную силу (Н.С.):



Продольная
составляющая результирующей Н.С. в СП
 равна сумме проекций Н.С. отдельных фаз
(
равна сумме проекций Н.С. отдельных фаз
( )
на ось обмотки возбуждения. Эта Н.С.
создаёт магнитный поток, пронизывающий
выходную обмотку СП и наводит в ней ЭДС.
Тогда выходное напряжение:
)
на ось обмотки возбуждения. Эта Н.С.
создаёт магнитный поток, пронизывающий
выходную обмотку СП и наводит в ней ЭДС.
Тогда выходное напряжение:
 ,
,
где -коэффициент
пропорциональности между
-коэффициент
пропорциональности между и
и . Т.о. выходное напряжение СП пропорционально
косинусу угла 0.
. Т.о. выходное напряжение СП пропорционально
косинусу угла 0.
Если
за исходное принять положение выходной
обмотки повернутое на 90˚, то
 будет пропорциональноsin
0:
будет пропорциональноsin
0:

Если0 10˚,
то
10˚,
то
В станкахках с ЧПУ вместо сельсина-датчика используют цифро-аналоговый преобразователь.

На
вход ЦАП поступает двоичный код, который
преобразуется в соответствующие
напряжения каждой обмотки соответствующие
величинам ЭДС в цепи синхронной связи
в зависимости от требуемой величины
перемещения. Если угол поворота двигателя
не совпадает с напряжениями от ЦАП, то
на выходе существует
 ,
которое подаётся на двигатель. Якорь
двигателя поворачивается до тех пор
пока
,
которое подаётся на двигатель. Якорь
двигателя поворачивается до тех пор
пока не будет =0, т.е. до тех пор пока вал
сельсина-приёмника СП не повернётся на
угол компенсирующий напряжения с выхода
ЦАП.
не будет =0, т.е. до тех пор пока вал
сельсина-приёмника СП не повернётся на
угол компенсирующий напряжения с выхода
ЦАП.
Частота вращения сельсинов ограничена и должна быть не более 3-5% частоты вращения магнитного потока возбуждения.
На точность работы сельсинов влияют:
-фазовая асимметрия сельсинов, т.е. неравенство сопротивлений фазовых обмоток;
-магнитная несимметрия - различная магнитная проводимость в разных направлениях пакетов статора и ротора;
-зубчатые гармоники - магнитная проводимость воздушного зазора, вследствие зубчатого строения статора или ротора, при повороте ротора не остаётся постоянной, а периодически изменяется;
В зависимости от точности изготовления сельсины делятся на 3 класса: 1,2 и 3. Погрешности измерения угла, град:
0÷
 0.25
; 2-
0.25
; 2- ;
3-
;
3-
Для увеличения точности измерения углового положения следящих систем применяют каналы грубого и точного отсчётов.
Ротор СД грубого отсчёта непосредственно соединён с валом и ротором СД точного отсчёта – через редуктор i=10÷35 .
При больших углах рассогласования напряжения снимается с СП грубого отсчёта, а при малых с СП точного отсчёта.

Основные требования предъявляемые к передачам на сельсинах:
1.Высокая статическая и динамическая точность. Статическая точность определяется погрешностью следования в режиме медленного поворота вала датчика. Динамическая- в режиме вращения с меняющейся по заданному закону угловой скоростью.
2.Способность к самосинхронизации при высоких угловых скоростях и наличие в системе нескольких приёмников.
3.Способность самосинхронизации в пределах одного оборота, т.е. свойства системы на сельсинах занимать только одно устройство, согласованное положение в пределах оборота.
Погрешность следования- отклонение угла поворота ротора сельсина-приёмника от угла поворота сельсина- датчика в положении согласование.
Для её уменьшения необходимо стремится увеличивать удельный и максимальный синхронизирующие моменты и уменьшать время успокоения ротора приёмника.
4.Для
трансформаторных – максимально возможная
крутизна при заданном сопротивлении
 и минимальное выходное сопротивление
приёмника.
и минимальное выходное сопротивление
приёмника.
Преобразователи с электрической редукцией
Дальнейшее увеличение точности систем измерения и передачи угла связано с большими технологическими и конструктивными трудностями. И возможно за счет введения механического редуктора через который соединяется вал ВТ или сельсина. Однако редукторы имеют также конструктивные погрешности: зазоры(люфты), непостоянство передаточного отношения, моменты трения, которые вносят зону нечувствительности.
Поэтому существуют преобразователи с электрической редукцией, который заключается в том, что за малый угол поворота входной оси преобразователя выходной его параметр (амплитуда или фаза) изменяется за один период, а при повороте ротора на 3600 число периодов равно передаточному отношению эмитрической редукции.
Из индукционных преобразователей с эмитрической редукцией широкое применение получили индукционные редуктосины и индуктосины.
Погрешность системы передачи угла с многопериодными преобразователями уменьшается в число раз, равное передаточному отношению эмитрической редукции. Кроме того, в многопериодных преобразователях происходит ослабление влияния технологических погрешностей изготовления, в том числе из-за неравномерностей воздушного зазора за счет осреднения.
Однако в преобразователях с эмитрической редукцией увеличивается отклонение выходного напряжения от синусоидального закона.
Многополюсные ВТ
В индукционных преобразователях получение эмитрической редукции сводится к увеличению числа пар полюсов роторной и статорной обмоток.
Могут быть различные пути создания многополюсных СКВТ.
Один из них – применение многополюсных обмоток на пакетах статора и ротора двухполюсных преобразователей.
Другой путь – увеличение числа зубцов при одновременном увеличении числа пар полюсов на роторе и статоре таким образом, чтобы число пазов на полюс и фазу для двух- и многополюсных ВТ было одинаковым.
Индукционный редуктосин
Представляет собой бесконтактный СКВТ с эмитрической редукцией. Статор собирается из пластин эл.технической стали с большим числом зубцов, а ротор может быть выполнен в виде зубчатого колеса из эл.технической стали или также собран из пластин. Соотношение зубцов статора и ротора может быть любым.
Для пояснения принципа работы редуктосина рассмотрим наиболее простой случай, когда отношение числа зубцов статора и ротора равно 4/3 или 5/4.

Первичная 1-1 и две вторичные обмотки 2-2, 3-3 размещены на пакете статора.
Первичная обмотка наматывается на все зубцы статора, вторичные через один зубец.
При
питании первичной обмотки синусоидальным
напряжением во вторичных обмотках
наводятся э.д.с., амплитуды которых
изменяются в функции угла поворота с
пространственным сдвигом, равным 900 или
 зубцового деления ротора.
зубцового деления ротора.
Повороту ротора на угол равный одному зубцовому делению, соответствует полный период изменения амплитуды выходного напряжения. А при повороте ротора на один оборот число периодов амплитуды выходного напряжения равно числу зубцов ротора.
Форма кривой выходного напряжения определяется главным образом угловыми размерами зубцов ротора и статора, а также величиной зазора между ними. При определенных соотношениях этих величин можно получить близкую к синусоиде форму кривой изменения амплитуды переменной составляющей проводимости воздушного зазора в функции угла поворота.
Если
к первичной обмотке подведено напряжение

то выходные напряжения обмоток 2 и 3 :


где

Где
 – максимальное значение напряжения на
вторичных обмотках
– максимальное значение напряжения на
вторичных обмотках
 –активное
и индуктивное сопротивления первичной
обмотки статора
–активное
и индуктивное сопротивления первичной
обмотки статора
 –передаточное
отношение эмитрической редукции = числу
зубцов ротора
–передаточное
отношение эмитрической редукции = числу
зубцов ротора
 – число витков первичной и вторичной
обмоток:
– число витков первичной и вторичной
обмоток:
 -
амплитудное значение переменной
составляющей магнитной проводимости;
-
амплитудное значение переменной
составляющей магнитной проводимости;
 Коэффициент
трансформации редуктосинов не превышает
0,25, а у ВТ 0,5
Коэффициент
трансформации редуктосинов не превышает
0,25, а у ВТ 0,5
 0,65.
0,65.
Тем
не менее чувствительность редуктосинов
гораздо выше, чем у ВТ, т.к крутизна на
линейном участке увеличивается в
 раз, что эквивалентно соединению ВТ
через повышающий редуктор с передаточным
отношениемi
=
раз, что эквивалентно соединению ВТ
через повышающий редуктор с передаточным
отношениемi
= .
.
Выключение
обмоток редуктосина в фазовом режиме
аналогично выключению ВТ. И фаза выходного
напряжения пропорциональна углу поворота
ротора
 .
.
Индуктосины
Индуктосин – индукционный датчик угла или положениея с плоскими печатными обмотками.
Особое
широкое применение получил в системах
ЧПУ металлорежущими станками.Более 24 станков с ЧПУ оснащено индуктосинами.
Индуктосин представляет собой
разновидность многополюсного поворотного
трансформатора с обмотками, выполненными
фотохимическим методом.
станков с ЧПУ оснащено индуктосинами.
Индуктосин представляет собой
разновидность многополюсного поворотного
трансформатора с обмотками, выполненными
фотохимическим методом.
Высокая точность обусловлена возможностью получения большого коэффициента электрической редукции, значение которого может достигать 300 и более при сравнительных небольших габаритах датчика.
Основными деталями кругового индуктосина является 2 диска: ротор и статор из изоляционного материала (керамика, стекло и т.п).
Один из дисков соединяется с валом, угловое положение которого подлежит измерению (ротор), второй (статор) неподвижен.
На торцовых поверхностях обращенных друг к другу, диски несут печатные обмотки имеющие вид радиального ротора, составленного из плоских проводников.
Существуют : - угловые
- линейные
Угловые представляют собой диски из изоляционного материала, расположенные соосно и параллельно, на которых печатным способом нанесены проводящие линии или обмотки.


На роторе расположена однофазная многополюсная обмотка. На статоре – двухфазная многополюсная секционированная обмотка.
Линейные
представляют собой две параллельно
близко (воздушный зазор
 0,1мм)
расположенные пластины одна из
которых-статор, другая – ротор.
0,1мм)
расположенные пластины одна из
которых-статор, другая – ротор.
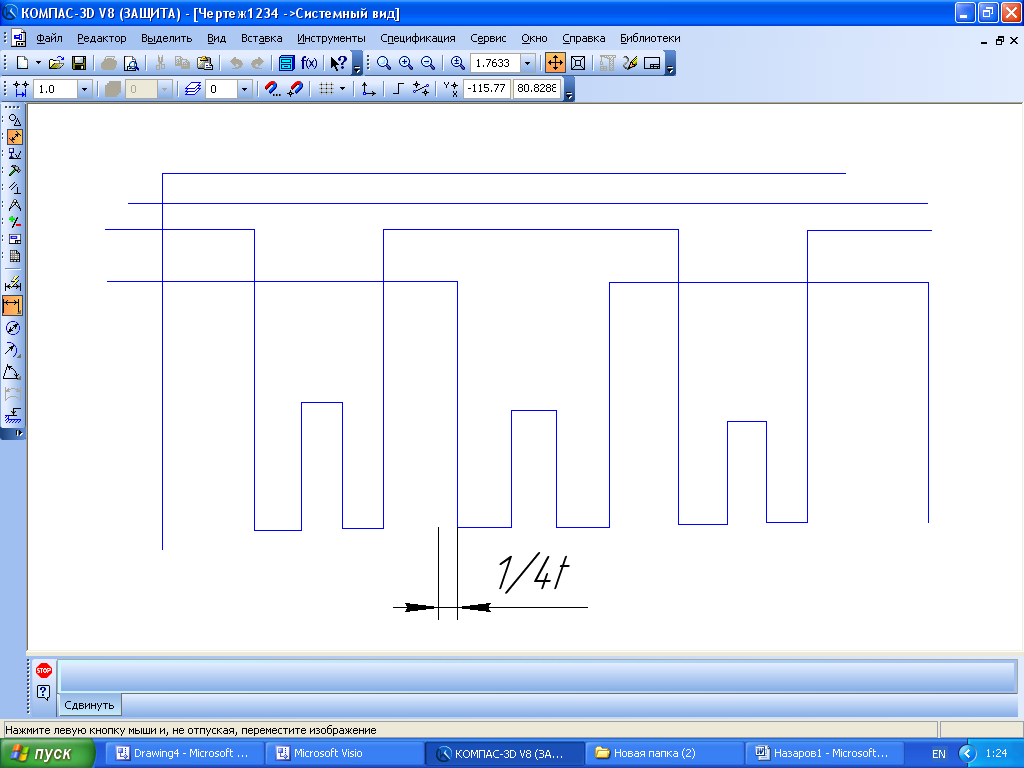
Обмотки статора сдвинуты друг относительно друга на ¼ или ¾ шага.Первичная обмотка составлена из 2х проводников.
При подключении переменного напряжения к зажимам этой обмотки в пространстве, окружающем обмотку, возникает переменное электромагнитное поле и в каждом витке вторичных обмоток индуктируется Э.Д.С.
При вращении ротора вокруг вертикальной оси будут меняться как амплитуда, так и направление вектора электромагнитной индукции. Поэтому Э.Д.С. при взаимном угловом перемещении изменяется от максимально положительного до максимального отрицательного значений и т.д. Период повторения кривой
равен
 раз, где р – число пар проводников
(полюсов).
раз, где р – число пар проводников
(полюсов).
Электромагнитную
связь в обмотках имеют не только радиально
расположенные проводники, но и лобовые
части. Мгновенные значения тока во всех
лобовых частях однофазной обмотки
всегда совпадают по направлению, поэтому
Э.Д.С. индуктируется в лобовых частях
вторичной обмотки, при взаимном угловом
перемещении обмоток никогда не проходит
через нуль. Постоянная составляющая
этой Э.Д.С. не зависит от угла поворота
и является паразитным сигналом. Для ее
исключения вторичную обмотку выполняют
секционированной. Секции сдвигают
относительно друг друга на у а постоянная
составляющая уничтожается. Возможны и
другие варианты компенсации Э.Д.С.
лобовых частей.На рис. обмотки сдвинуты
друг относительно друга на 1/4 шага (или на 3/4 шага).
шага (или на 3/4 шага).

Фактически
индуктосин является воздушным
трансформатором. Коэффициент индуктивной
связи очень низок, поэтому происходит
значительное ослабление выходного
сигнала (даже при повышенной частоте
источника питания). Так например:
воздушный зазор 0,1мм
 .
.
В этом основной недостаток индуктосинов.
Достоинство: печатный способ выполнения обмоток и вследствие этого возможность получения значительного передаточного отношения эмитрической редукции при сравнительных малых габаритах, благодаря чему существенно повышается точность преобразователя.
В системах управления станков с ЧПУ используют: - в амплитудном режиме
- фазовом режиме
Чаще используется при работе в фазовом режиме: на первичные обмотки подаются ортогональные напряжения.
Напряжение на выходе снимаемое с однофазной обмотки:

т.е
в идеальном случае на выход с двухфазного
фазовращателя возникает напряжение,
фаза которого пропорциональна перемещению
ротора
 ,
а амплитуда выходного напряжения не
меняет своей величины.
,
а амплитуда выходного напряжения не
меняет своей величины.
Если в круговых индуктосинах период α [0,2π] то в линейных от 0 до t (t – шаг обмотки). Таким образом индуктосины являются циклическими датчиками.
Точность измерения линейных идуктосинов 1мм, угловых – 1-5 угл.сек.
Для связи индуктосинов с системой ЧПУ сигнал фазы индуктосина переведется в числовой код.
Сравнительная характеристика многополюсных ВТ, редуктосинов и индуктосинов.
1. ВТ характеризуется малым коэффициентом ослабления выходного сигнала
( .
.
Недостаток – наличие контактных колец.
2.
Редуктосины – бесконтактные машины,
но имеют большой коэффициент ослабления
выходного сигнала ( .
.
3. ВТ и редуктосины отличаются сложностью наметки обмоток.
4. Индуктосины – простота и высокая технологичность и точность изготовления, недостаток – очень большой коэффициент ослабления выходного напряжения
(Uввоз=40 В, Uвых=3-4 В)
ФОТОЭЛЕКТРИЧЕСКИЕ ДАТЧИКИ ПОЛОЖЕНИЯ
2.1. Общие сведения
Как уже указывалось, принцип действия фотоэлектрического первичного преобразователя (ФПП) перемещений состоит в преобразовании линейного X или углового φ перемещения в изменение интенсивности светового потока, поступающего на приемник излучения (фотоприемник).
Исходя из этого определения, практически все существующие ФПП перемещений по характеру воздействия светового потока на фотоприемник можно разделить на три основные группы: 1) ФПП с перекрытием светового потока; 2) растровые ФПП; 3) ФПП с кодовыми масками.
Первые две группы используются в ЦПП последовательного счета как в накапливающих, так и в циклических. Третья группа ФПП относится к ЦПП считывания.
По виду выходного сигнала ФПП, как и датчики других типов, могут быть непрерывными и дискретными (как с импульсным, так и с квантованным выходным сигналом).
Из всего многообразия существующих ФПП здесь будут рассмотрены только основные типичные структуры построения ФПП и будет дан их сравнительный анализ.
2.2. ФПП С ПЕРЕКРЫТИЕМ СВЕТОВОГО ПОТОКА
Наиболее простым и надежным является амплитудный ФПП с перекрытием светового потока посредством заслонки, шторки или флажка [2,6]. Схема одного из вариантов построения такого ФПП представлена на рис. 2.1 [2].
Шток 4, связанный одним концом с объектом, линейное перемещение X которого необходимо измерить, имеет на другом конце заслонку 3. Перемещение

заслонки 3 перекрывает отверстие диафрагмы 2, в результате чего изменяется величина светового потока, идущего от источника излучения ИИ с конденсором I к объективу 5 и фотоприемнику ФП и далее на усилитель У. Таким образом, на выходе датчика имеем сигнал, амплитуда которого пропорциональна перемещению X. Недостатками рассмотренной схемы являются
Для определения угловых перемещений с учетом направления часто используют простую схему накапливающего типа, представленную на рис. 2.4 [9].
Схема работает следующим образом. Кодовый диск с прорезями жестко закреплен на валу, угловое положение 9 которого необходимо измерить. С обеих сторон КД установлены источники света ИИ1, ИИ2 и фотоприемники
ФП1 и ФП2.
Когда
между i-м
фотоприемником ФП
и
источником ИИ
окажется
просвет в диске КД
при
его повороте на определенный угол в, то
на выходе соответствующего ФП
появится
импульс, который поступает на один из
входов логической схемы ЛС.
На
другой вход ЛС
поступает
импульс со второго ФП.
Схема
ЛС сравнивает очередность поступления
этих импульсов, определяя направление
поворота диска КД
{т.е.
знака приращения 9). Фотоприемники
конструктивно расположены так, что в
случае вращения КД
в
положительном направлении первым выдает
импульс ФП1,
а
при отрицательном (противоположном)
направлении — ФП2.
При
получении пары импульсов от, ФП1
и
ФП2
логическая
схема выдает один импульс на счетный
вход реверсивного счетчика PC
и одновременно — сигналы на два входа
управления направлением счета. Таким
образом, рассмотренная схема подсчитывает
все изменения угла 9 на величину
кванта![]() алгебраически
суммируя их с учетом знака.
алгебраически
суммируя их с учетом знака.
Достоинствами
схемы, как, впрочем, и других схем
накапливающего типа, измеряющих только
приращения, являются высокое быстродействие
и простота практической реализации.
Время преобразования накапливающего
ФПП практически равно времени съема
показаний со счетчика. Однако у
накапливающих ФПП имеется существенный
недостаток — принципиальная возможность
появления систематической погрешности.
Действительно, если, например, при
какой-либо неисправности произойдет
или кратковременный перерыв в передаче
импульсов счетчику, или сброс информации
счетчика, то возникнет ошибка, которая
не устраняется до тех пор, пока схема
не будет искусственно приведена в
начальное состояние. Эта ошибка может
быть в некоторой степени устранена,
если в схеме предусмотреть периодическую
установку входного вала в положение![]() и
сброс всех триггеров счетчика в 0. Кроме
того, рассмотрен-
и
сброс всех триггеров счетчика в 0. Кроме
того, рассмотрен-
ная схема обладает малыми помехоустойчивостью и надежностью, поскольку в случае поступления на счетчик лишних импульсов, вызванных, например,
электромагнитными
помехами, возникшая ошибка не
устраняется до тех пор, пока схема не
будет искусственно приведена в
начальное состояние.
Последнего недостатка лишена схема ФПП, приведенная на рис. 2.5 [а.с. 1173715 (СССР)]. Переменные сигналы с выходов ФП1 и ФП2, сдвинутые на я/2 относительно друг друга, сравниваются на компараторе К1, на выходе которого формируются импульсы Ui{t). На компараторе К2 производится сравнение переменных сигналов, поступающих с ФП1 и фазоинвертора ФИ. На выходе К2 формируются импульсы Ut(t). При наличии электронных помех синфазные сигналы помехи, поступающие на оба входа K1, подавляются в его входной дифференциальной цепи. Парафазные сигналы помехи на входах К2 могут вызвать его переключение, но такое срабатывание К2 будет воспринято логической схемой ЛС и счетчиком PC как прохождение окна кодового диска через оптическую ось ФПП сначала в одном, а затем в другом направлении. Таким образом, сигнал помехи не вызовет ложной регистрации импульсов в счетчике.
2.3. РАСТРОВЫЕ ФПП ПЕРЕМЕЩЕНИЯ
2.3.1. ФПП счета муаровых полос (накапливающие ПП)
Основным узлом любого растрового ФПП является оптический модулятор, состоящий из сопряжения измерительного (радиального или линейного) и индикаторного (неподвижного) элементов. По типу применяемого сопряжения различают растровые, дифракционные и интерференционные звенья [1,2,4,91-
Между перечисленными звеньями много общего, так как они обладают рядом сходных признаков. Все они имеют периодическую структуру. Перемещение измерительного элемента относительно индикаторного на некоторую величину вызывает повторение показаний выходного сигнала чувствительного элемента (фотоприемника). Наименьшая величина перемещения, при которой показания повторяются, является периодом звена.
Совершенно аналогично понятию характеристики пропускания растрового сопряжения понятие характеристики распределения освещенности в интерференционном поле интерференциального звена.
При сопряжении штриховых растров образуются комбинационные фигуры (полосы), шаг, форма и направление которых определяются взаимным расположением штрихов сопрягаемых растров.
При сопряжении двух систем волн образуются интерференционные фигуры (интерференционные полосы), шаг, форма и направление которых определяются взаимным расположением волновых структур.
В зависимости от характера воздействия на лучистый поток различают растры пропускающие, и отражающие. Пропускающие растры представляют собой систему прозрачных и непрозрачных элементов. Отражающие растры выполняются в виде решеток с элементами, зеркально отражающих свет [1,9}. Принцип действия растровых ФПП заключается в следующем.
При перемещении (угловом или линейном) измерительного растра относительно неподвижного индикаторного растра происходит модуляция светового потока по амплитуде в функции перемещения, т. е. периодическое изменение освещенности чувствительного элемента, расположенного за полем растрового сопряжения.
При этом освещенность фотоприемника максимальна при совпадении штрихов измерительного и индикаторного растров в минимальна, когда
штрихи одного растра закрывают прозрачные участки другого. Полный цикл изменения освещенности фотоприемника произойдет при перемещении растра на величину шага. Считая число таких циклов, можно измерять линейные в угловые перемещения с точностью до шага растра.
Если расположить растры так, чтобы между штрихами образовался некоторый угол, то возникнут отчетливо видимые широкие темные и светлые полосы. Эти полосы называются комбинационными (или муаровыми) полосами. Перемещение измерительного растра относительно индикаторного в направлении, перпендикулярном штрихам, на величину шага растра вызовет перемещение комбинационных полос в поперечном направлении (вдоль штрихов) на величину шага полос. При этом шаг муаровой полосы связан с шагом растра следующим соотношением [9]:
![]() (2.1)
(2.1)
где
![]() —шаг
муаровой полосы;
—шаг
муаровой полосы;![]() —шаг
растра;
—шаг
растра;![]() —угол
сдвига измерительного растра
относительно индикаторного.
—угол
сдвига измерительного растра
относительно индикаторного.
Аналогичным образом (как в случае параллельного расположения растров), считая число муаровых полос, можно измерять перемещения с точностью до шага растра.
Описанный принцип действия позволяет строить достаточно простые схемы растровых ФПП, например со счетом числа муаровых полос [1,Э]. Одна из схем такого ФПП накапливающего типа представлена на рис 2.6. Рассмотрим принцип ее действия [1].
Для того чтобы обеспечить реверсивный счет, растровый модулятор РМ (рис. 2.в.а), состоящий из конденсора /, растровых решеток РР, диафрагмы Д и двух объективов 2, должен выдавать два сигнала, сдвинутых по пространственной фазе на я/2 относительно друг друга, т. е. находящихся в квадратуре. Это достигается соответствующим размещением диафрагм в растровом поле или сдвигом индикаторных растров относительно друг друга [1,6,10]. От фотоприемников ФП1 и ФП2 синусоидальные сигналы I и II (рис. 2.6,6), сдвинутые по пространственной фазе на п/2, поступают на формирователи Ф1 и Ф2. Каждый из формирователей имеет по два выхода. С одного выхода формирователя снимается прямоугольное напряжение с той же фазой, что и входной синусоидальный сигнал, а с другого выхода снимается инвертированный сигнал. В результате имеем четыре прямоугольных напряжения А, В и А, В, три из которых сдвинуты относительно каждого предыдущего на я/2 по пространственной фазе. Выходные сигналы А и А подаются на дифференцирующие цепи ДЦ1 и ДЦ2. Продифференцированные импульсы А' и А' поступают на соответствующие входы схем совпадения И1 — И4, на вторые входы которых подаются соответствующие сигналы с выходов Ф1 а Ф2. Для показанной на схеме коммутации входов и выходов схем совпадений И1 — И4 импульсы вырабатываются на шине прямого хода и подаются на вход (+) реверсивного счетчика PC, если измерительный растр движется в прямом направлении. При Движении в обратном направлении счетные импульсы являются на шине обратного хода и затем подаются на вход (—) PC. При перемещении растра на один шаг на счетчик PC подаются два импульса, т. е. рассмотренная схема ФПП обладает разрешающей способностью, соответствующей 1/2 шага растра. Принцип действия схемы иллюстрируется временными диаграммами (рис. 2.6,6").
Усложнением
блока выработки счетных импульсов можно
увеличить разрешающую способность
до 1/4 и даже до 1/8 шага растра (т.е. в 4
раза). Схемы эти известны [1,6,9] и здесь
приводиться не будут. Отметив только,
что выпускаемые в настоящее время
промышленностью линейные н цифровые
интегральные микросхемы (ИМС) позволяют
создавать растровые накапливающие
ФПП с 1/3 шага, удовлетворяющие всей
требованиям в отношении точности
интерполяции и надежности работы. При
этом получают разрешающую способность
в 1—2 мкм для растров с шагом![]() и
делением шага растра на 4 или 8 частей.
и
делением шага растра на 4 или 8 частей.
Одним из способов построения растровых накапливающих ФПП с разрешающей способностью, равной десятым долям микрометра, является применение промежуточной интерполяции на электронно-лучевой трубке. Этот способ
достаточно подробно изложен в [1] и здесь рассматриваться не будет. Отметим только, что с помощью электронно-лучевого интерполятора можно осуществить дробление шага растра, например, на 40 частей, если на входе реверсивного счетчика PC имеется схема деления на 4. Однако из-за определенной сложности и достаточно высокой стоимости этот способ широкого применения не получил.

Другим способом получения более высокой разрешающей способности ФПП счета муаровых полос является применение дифракционных решеток с малым шагом штрихов. Однако изготовление таких решеток в достаточной степени дорого и связано с определенными технологическими трудностями. Поэтому обычно накапливающие ФПП счета муаровых полос применяют в качестве датчиков грубого отсчета, используя в них дифракционные решетки с относительно крупным шагом.