

9.3.2. Коды условий
Во многих процессорах, включая описанные в разделе 4, флаги условий хранятся в регистре состояния процессора. Они устанавливаются и очищаются многими командами. В результате их можно проверить в последующих командах условного перехода для изменения потока выполнения программы. Оптимизирующий компилятор конвейерного процессора старается реорганизовать команды программы таким образом, чтобы по возможности избегать остановов конвейера из-за переходов или зависимостей между данными последовательных команд. Компилятор должен гарантировать, что реорганизация команд не приведет к изменению результатов вычислений. Зависимости, связанные с использованием флагов условий, мешают компилятору реорганизовывать команды.
В качестве примера рассмотрим последовательность команд, приведенную на рис. 9.7, а. Предположим, что команды Compare и Branch = 0 выполняются так, как показано на рис. 9.4. Решение о переходе принимается не на шаге D2 а на шаге Е2, поскольку для него нужны результаты обработки команды Compare. Время, необходимое команде перехода, можно сократить, поменяв местами команды Add и Compare (рис. 9.7, 6). В результате во время декодирования команды Branch уже будут доступны результаты выполнения команды сравнения, что позволит сразу принять решение о переходе без предсказаний. Важный момент заключается в том, что команды сложения и сравнения можно поменять местами только в том случае, если команда сложения не воздействует на флаги условий.
Add R1,R2
Compare R3,R4
Branch = 0
a
Compare R3,R4
Add R1,R2
Branch = 0
б
Рис. 9.7. Изменение порядка следования команд: фрагмент программы (а);
команды после переупорядочения (б)
Проанализировав пример, можно сделать два важных вывода относительно обработки флагов условий. Во-первых, для обеспечения гибкой реорганизации команд флаги условий должны изменяться как можно меньшим количеством команд. Во-вторых, нужно, чтобы компилятор указывал, в каких командах флаги условий модифицируются, а в каких нет. Системы команд, разрабатываемые с учетом конвейеризации, обычно отвечают этим требованиям. Реорганизация команд, представленная на рис. 9.7, б, может быть выполнена лишь при условии, что флаги обрабатываются только в том случае, когда это явно указано в коде операции. Такую возможность поддерживают архитектуры SPARC и ARM.
9.4. Тракты данных и управление
С общими принципами организации тракта данных процессора мы познакомились в разделе 8. Давайте рассмотрим трех-шинную структуру, но приспособим эту структуру к конвейерному выполнению команд, как показано на рис. 9.8. На рисунке вы видите структуру для 4-ступенчатого конвейера. Обращения к кэшу данных могут выполняться на ступени E или на более поздних ступенях, что зависит от режима адресации и особенностей процессора. Рассмотрим важнейшие изменения, внесенные в схему.
1. Отдельные кэши команд и данных, которые имеют отдельные соединения с процессором для передачи адреса и данных. В этом случае используются две версии регистра MAR: IMAR обеспечивает доступ к кэшу команд, a DMAR — к кэшу данных.
2. Регистр PC соединен непосредственно с регистром IMAR, так что его содержимое может быть переслано в IMAR одновременно с выполнением другой операции в АЛУ.
3. Для использования косвенной регистровой и индексной адресации адрес данных, хранящийся в регистре DMAR, можно получить прямо из регистрового файла или из АЛУ.
4. Операциям чтения и записи выделены раздельные регистры MDR. В ходе загрузки и сохранения возможен непосредственный обмен данными между регистрами и регистровым файлом без пропуска через АЛУ.
5. На входах и выходах АЛУ имеются буферные регистры SRC1, SRC2 и RSLT. Соединения для продвижения данных на рис. 9.8 не показаны.
6. Регистр команд заменен очередью команд, загружаемых из кэша.
7. Выход дешифратора команды соединен с конвейером управляющих сигналов. О необходимости буферизации управляющих сигналов и пересылки их от одной ступени к другой вместе с командами рассказывалось в разделе 9.1. Этот конвейер сохраняет управляющие сигналы в буферах В2 и ВЗ (рис. 9.2, а).
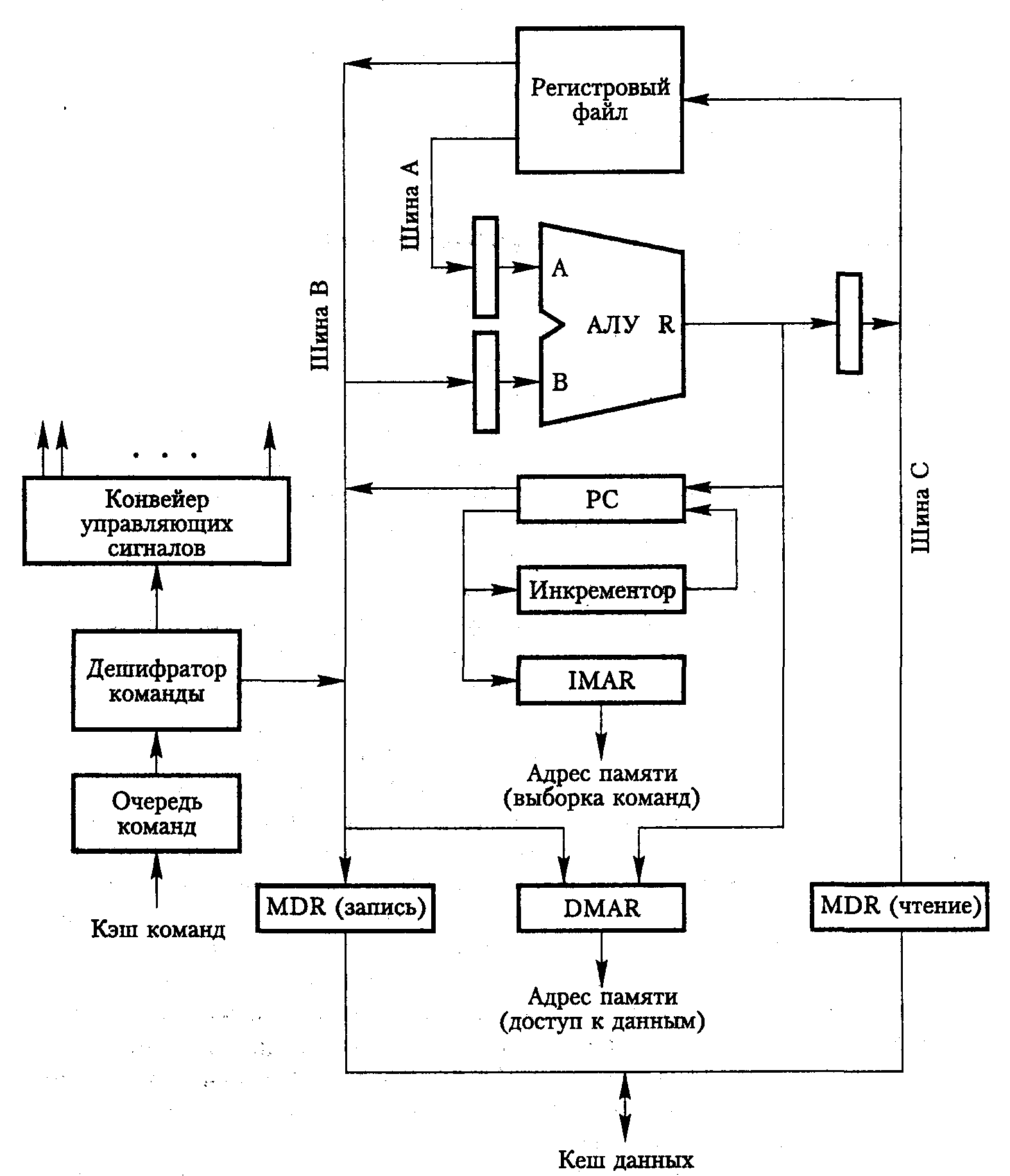
Рис. 9.8. Тракт данных, модифицированный для конвейерного выполнения с промежуточными буферами на входе и выходе АЛУ
Процессор (рис. 9.8), может независимо выполнять следующие операции:
считывать команды из кэша команд;
производить приращение значений регистра PC;
декодировать команды;
считывать из кэша и записывать в кэш данные;
считывать содержимое двух регистров из регистрового файла;
осуществлять запись в один регистр регистрового файла;
выполнять операции АЛУ.
Поскольку в перечисленных операциях не задействованы общие ресурсы, их можно выполнять одновременно в любых сочетаниях. Это обеспечивает гибкость, необходимую для реализации 4-ступенчатого конвейера. В качестве примера возьмем последовательность из четырех команд: I1, I2, I3, и I4. Как показано на рис. 9.2, а, на такте 4 производятся следующие действия:
запись результата команды I1 в регистровый файл;
чтение операндов команды I2 из регистрового файла;
декодирование команды I3;
выборка команды I4 и приращение значения регистра PC.
Выводы
В этой главе рассматривалась внутренняя организация центрального процессорного устройства компьютера. В современных машинах применяются самые разные вариации описанной здесь архитектуры. При выборе конкретного решения конструкторы стараются найти оптимальное соотношение между скоростью выполнения программ и стоимостью реализации процессора. Кроме того, учитываются особенности выбранной технологии, гибкость системы с точки зрения модификации и потребность в специальных возможностях системы команд компьютера.
Мы рассмотрели два подхода к реализации управляющего блока процессора — аппаратное управление и микропрограммное управление. Аппаратное решение выбирают в том случае, если на первом плане стоит скорость функционирования компьютера. Если же более важным критерием является гибкость реализации системы команд, то предпочтение отдают микропрограммному управлению.