

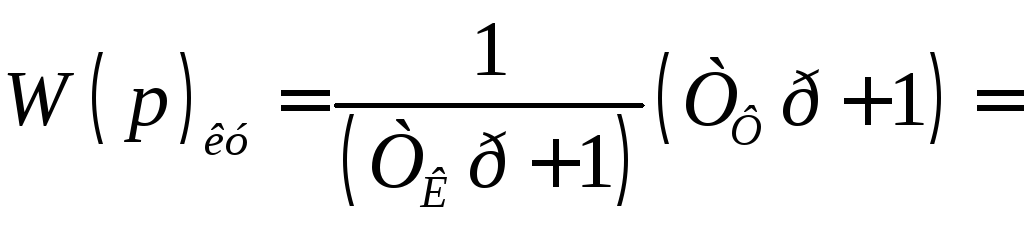
5. Определение передаточной функции корректирующего устройства и запаса по фазе на частоте среза
ЛАЧХ корректирующего устройства
находится как разность построенных
![]() нескорректированной системы и
нескорректированной системы и![]() скорректированной
системы, т.е.
скорректированной
системы, т.е.
![]()
В результате вычитания ЛАЧХ корректирующего устройства имеет асимптоты 0; -20; 0 дБ/дек.Такая ЛАЧХ реализуется двумя последовательно включенными динамическими звениями – апериодическим и форсирующим, т.е.
где
![]() -
постоянная времени корректирующего
форсирующего звена.
-
постоянная времени корректирующего
форсирующего звена.
ЛФЧХ разомкнутой скорректированной
системы строится по передаточной функции
![]() из
соотношения
из
соотношения
![]()
в диапазоне частот
![]() .
Корректирующее устройство с передаточной
функцией может быть реализовано как на
пассивных R, С элементах, так и на
операционном усилителе постоянного
тока в виде активного звена, как это
предлагается в [4]. Схема корректирующего
устройства приведена на рис.5
.
Корректирующее устройство с передаточной
функцией может быть реализовано как на
пассивных R, С элементах, так и на
операционном усилителе постоянного
тока в виде активного звена, как это
предлагается в [4]. Схема корректирующего
устройства приведена на рис.5
ЛАЧХ и ЛФЧХ построены на рис.4.
|
|
1 |
2 |
4 |
10 |
|
40 |
100 |
400 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Запас по фазе на частоте среза
![]() в
скорректированной системе равен
в
скорректированной системе равен![]()
6. Передаточные функции замкнутой скорректированной системы электропривода
Передаточные функции по управляющему
воздействию
![]() и возмущению от
и возмущению от![]() выведены для структурной схемы на рис.3
и имеет следующий вид
выведены для структурной схемы на рис.3
и имеет следующий вид

где




Передаточная функция по ошибке от задающего воздействия

где
![]()
![]()
![]()
Передаточная функция по ошибке от возмущения по моменту нагрузки
![]()
где

![]() ;
;![]()
![]() ;
;![]()
![]() ;
;![]()
![]()
Уравнение механической характеристики
![]() в синтезированной замкнутой системе
регулирования скорости
в синтезированной замкнутой системе
регулирования скорости
![]()
 ,
,
где -
модуль жесткости механической
характеристики одноконтурной замкнутой
системы электропривода, обладающей
нулевым порядком астатизма по задающему
воздействию
-
модуль жесткости механической
характеристики одноконтурной замкнутой
системы электропривода, обладающей
нулевым порядком астатизма по задающему
воздействию![]() и
возмущению
и
возмущению![]() .
.
От модуля жесткости зависит тангенс
угла наклона γмеханической
характеристики в системе координат
(![]() ),
),
Для синтезированной системы регулирования
на рис.5 приведено семейство механических
характеристик, на которых может работать
электропривод при изменении сигнала
задания в пределах
![]() и изменении нагрузки на валу в пределах
и изменении нагрузки на валу в пределах![]() .
.
7. Расчет переходных процессов при отработке сигналов задания и возмущения
Переходные процессы отработки задающих
воздействий
![]() и возмущений
и возмущений![]()
![]() ,
,![]() ,
,![]() рассчитываются по передаточным функциям
на ЭВМ с использованием учебной программы
«ПОЛИНОМ» на кафедре «Электропривод и
автоматизация промышленных установок
и технологических комплексов» МГОУ.
Графики переходных процессов приведены
на рис.6, 7, 8.
рассчитываются по передаточным функциям
на ЭВМ с использованием учебной программы
«ПОЛИНОМ» на кафедре «Электропривод и
автоматизация промышленных установок
и технологических комплексов» МГОУ.
Графики переходных процессов приведены
на рис.6, 7, 8.
Параметры неизменяемой части системы Типоразмер двигателя м -
|
Таблица
| ||||
|
№ п/п |
Наименование параметра |
Обозначение и расчетное соотношение |
Размерность |
Величина параметра |
|
1 |
Номинальная мощность |
PH |
кВт |
|
|
2 |
Номинальная скорость |
|
рад/с |
|
|
3 |
Номинальное напряжение |
UH |
В |
|
|
4 |
Номинальный ток |
IH |
А |
|
|
5 |
Коэффициент момента двигателя |
CM |
Нм/А |
|
|
6 |
Коэффициент эдс электродвигателя |
CE |
В/рад/с |
|
|
7 |
Коэффициент передачи двигателя |
k |
рад/с/В |
|
|
8 |
Сопротивление якорной цепи |
Rяц |
Ом |
|
|
9 |
Коэффициент якорной цепи |
кяц=1/Rяц |
1/Ом |
|
|
10 |
Индуктивность якоря двигателя |
LЯ |
Гн |
|
|
11 |
Индуктивность якорной цепи |
Lяц |
Гн |
|
|
12 |
Электромагнитная постоянная времени якорной цепи |
Tяц |
с |
|
|
13 |
Суммарный момент инерции |
J |
кгм2 |
|
|
14 |
Модуль жесткости разомкнутой системы |
|
Нм/рад/с |
|
|
15 |
Электромеханическая постоянная времени |
Тм |
с |
|
|
16 |
Коэффициент усиления тиристорного преобразователя |
кТП |
- |
|
|
17 |
Постоянная времени тиристорного преобразователя |
ТТП |
с |
|
|
18 |
Коэффициент обратной связи |
к |
В/рад/с |
|