

3. Замкнутые электроприводы с подчиненным регулированием координат
Качественное регулирование координат в системе П–Д обеспечивает принцип подчиненного регулирования. Этот принцип предусматривает регулирование каждой координаты с помощью своего отдельного регулятора и соответствующей обратной связи, т. е. регулирование каждой координаты происходит в собственном замкнутом контуре и требуемые характеристики ЭП в статике и динамике можно получить за счет выбора схемы и параметров регулятора этой координаты и цепи ее обратной связи.
Чтобы ограничить ток и момент, нужно ограничить сигнал, поступающий с внешнего контура.
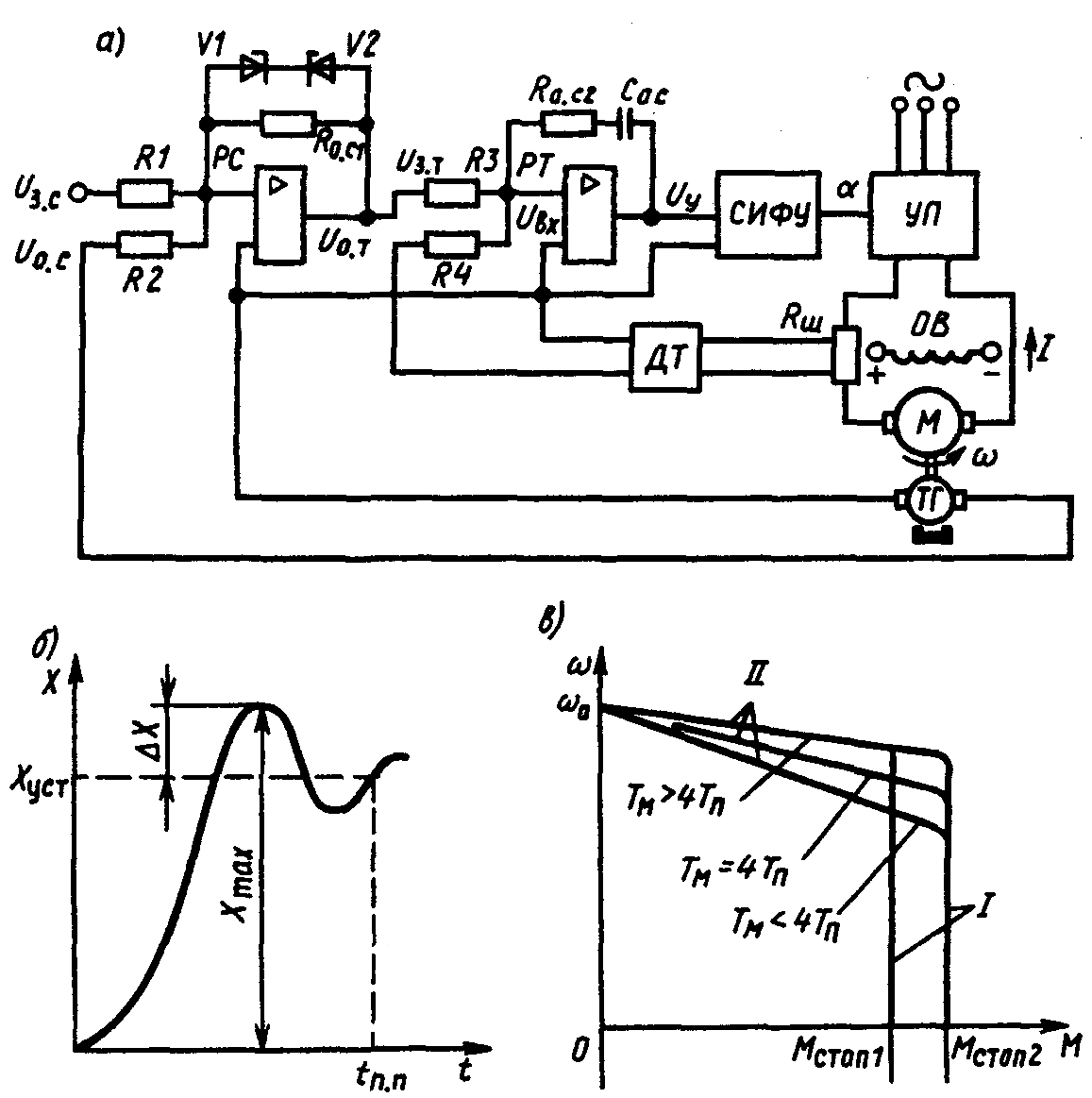
Рис. 10.
Рассмотрим схему ЭП (рис. 10а) с подчиненным регулированием, выходной регулируемой координатой которой является скорость. Управляющая часть схемы состоит из двух замкнутых контуров: контура регулирования тока (момента), содержащего регулятор тока РТ и датчик тока ДТ, и контура регулирования скорости, содержащего регулятор скорости PC и датчик скорости (тахогенератор) ТГ.
Регуляторы
тока и скорости выполняются на базе
операционных усилителей. Включение в
цепь задающего сигнала скорости
![]() регулятора скоростиPC
и
его обратной связи резисторов
регулятора скоростиPC
и
его обратной связи резисторов
![]() и
и
![]() обеспечивает
изменение этого сигнала с коэффициентом
обеспечивает
изменение этого сигнала с коэффициентом
![]() .
Аналогично
изменение сигнала обратной связи по
скорости
.
Аналогично
изменение сигнала обратной связи по
скорости
![]() происходит
с коэффициентом
происходит
с коэффициентом
![]() .
Такой
регулятор получил название пропорционального
регулятора скорости.
.
Такой
регулятор получил название пропорционального
регулятора скорости.
Включение
в цепь обратной связи регулятора тока
РТ
конденсатора
![]() последовательно с резистором
последовательно с резистором![]() позволяет
получить на выходе РТ
сигнал
в виде суммы двух составляющих:
позволяет
получить на выходе РТ
сигнал
в виде суммы двух составляющих:
![]() ,
,
где
![]() ,
,
![]() – коэффициенты
усиления сигналов.
– коэффициенты
усиления сигналов.
Здесь
сигнал
![]() содержит
пропорциональную и интегральную
составляющие входного сигнала
содержит
пропорциональную и интегральную
составляющие входного сигнала
![]() ,
т.е.
РТ
является
в этом случае пропорционально-интегральным
(П - И) регулятором.
,
т.е.
РТ
является
в этом случае пропорционально-интегральным
(П - И) регулятором.
Схема и параметры цепей регулятора выбираются из условия желаемого характера переходных процессов при регулировании координат. Обычно выбираются переходные процессы с затухающими колебаниями (рис. 10б), что позволяет обеспечить устойчивость этих процессов при небольших длительностях и перерегулированиях.
Распространенным
методом настройки регуляторов является
так называемый технический оптимум,
при котором перерегулирование
![]() составляет
4,3% от установившегося уровня, а время
переходного процесса
составляет
4,3% от установившегося уровня, а время
переходного процесса
![]() ,
где
,
где
![]() – электромагнитная постоянная времени
тиристорного преобразователя, принимаемая
обычно равной 0,01 с.
– электромагнитная постоянная времени
тиристорного преобразователя, принимаемая
обычно равной 0,01 с.
Схема
подчиненного регулирования позволяет
простыми средствами ограничить координаты
ЭП заданным уровнем. В схеме, приведенной
на рис. 10а,
для
этой цели в цепь обратной связи PC
включены
стабилитроны V1
и
V2,
которые,
ограничивая выходное напряжение PC,
являющееся
входным задающим сигналом тока
![]() ,
ограничивают
ток и момент двигателя.
,
ограничивают
ток и момент двигателя.
На
рис. 10, в приведены статические
характеристики ЭП с подчиненным
регулированием координат и настройкой
на технический оптимум. Их особенностью
является наличие вертикального участка
I,
на котором обеспечивается ограничение
тока и момента, и участка II
с жесткими характеристиками, наклон
которых зависит от соотношения двух
постоянных времени – электромеханической
двигателя
![]() и
электромагнитной преобразователя
и
электромагнитной преобразователя
![]() .
.
В схемах подчиненного регулирования используется и другой критерий настройки регуляторов по симметричному оптимуму, который позволяет получить абсолютно жесткие статические характеристики на участке II, но переходные процессы в этом случае характеризуются большим перерегулированием, доходящим до 55%. При настройке по симметричному оптимуму регулятор скорости PC выполняется пропорционально-интегральным.
Схемы с подчиненным регулированием координат нашли широкое применение в регулируемых ЭП как постоянного, так и переменного тока.