

37. Циу развертывающего уравновешивания. Особенности работы, построение алгоритмов, их особенности. Циу единичного приближения и их основные параметры.
ЦИУ уравновешивающего преобразования можно разбить на группы по алгоритму уравновешивания:
- ЦИУ единичного приближения – уравновешивающая величина изменяется на ЕМР.
- ЦИУ поразрядного уравновешивания – уравновешивание происходит поразрядно, начиная обычно со старшего (наименее точного) разряда или идет одновременно во всех разрядах.
Особенностями последовательных развертывающих АЦП с единичными приближениями являются небольшие частоты дискретизации, достигающие несколько кГц и малые статические погрешности. Достоинством АЦП данного класса является сравнительная простота построения, определяемая последовательным характером выполнения процесса преобразования.
Способ развертывающего уравновешивания характеризуется выполнением необходимых операций сравнения входной величины -X- и компенсирующей её -Y- по жесткой, заранее заданной программе, причем значение -Y- меняется от 0 до Ymax = Xmax , независимо от величины -X-. Отсчет величины -X- осуществляется в момент равенства с заданной погрешностью величин -X- и -Y-. И этот процесс повторяется периодически.
 Упрощенная
структура ЦИУ развертывающего
уравновешивания имеет вид (рис.2.1):
Упрощенная
структура ЦИУ развертывающего
уравновешивания имеет вид (рис.2.1):
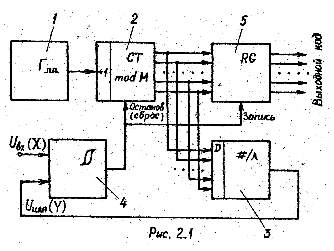
Работает он
следующим образом: входная величина X
подается на один из входов компаратора
4. На его второй вход подается с выхода
ЦАП 3 компенсирующая величина Y,
которая формируется с помощью счетчика
2 и генератора тактовых импульсов 1.
Изменение компенсирующей величины Y
происходит ступенями, равными шагу
квантования ЦАП 3, который определяется
разрядностью и значением опорного
напряжения этого ЦАП. При выполнении
условия X≤Y
компаратор 4 перебрасывается и в регистр
хранения информации 5 переписывается
цифровой код с выходов счетчика 2. Этот
код и представляет собой цифровой
эквивалент входной величины X.
При достижении числа М на выходах
счетчика 2 он сбрасывается в ноль и
начинается новый цикл преобразования
(измерения). Очевидно, что в такой
структуре диапазон измерения определяется
значением максимального выходного
напряжения ЦАП 3, а время преобразования
tПР,
определяемое моментом срабатывания
компаратора 4, зависит от значения
входной величины Y.
Время преобразования такого АЦП: tПР=
m∙
tТАКТ
+ tЗД
, где m
- число единичных ступенек квантования
(или импульсов тактовой частоты генератора
1), необходимых для компенсации
текущего значения входной величины X
; tТАКТ
- период тактовых импульсов генератора
1; tЗД
- сумма времени задержки срабатывания
компаратора 4, времени установления ЦАП
3 и времени задержки распространения
сигнала регистра 5
при записи
в него информации. Значение tЗД
определяется практически полностью
временем установления ЦАП 3, как наиболее
"медленного" звена. Когда tТАКТ
< tЗД
, возможно появление специфической
погрешности, обусловленной "проскакиванием"
в счетчик 2 нескольких дополнительных
импульсов. Поэтому каждый, случай
повышения тактовой частоты для увеличения
быстродействия в таких АЦП должен
тщательно анализироваться, так как
увеличивать ее можно только до некоторого
предела, определяемого значением tЗД.
Разрешающая способность АЦП определяется
зоной нечувствительности компаратора
и значением шага квантования ЦАП. Так
как это одни из самых точных элементов,
то следует ожидать высокой линейности
характеристики преобразования такого
АЦП. Поскольку шаг квантования ЦАП
обычно заметно больше зоны нечувствительности
компаратора, то статическая погрешность
(абсолютное значение) практически равна
шагу квантования. Для её уменьшения в
компенсирующую величину Y
обычно вводят постоянную составляющую,
равную 0,5h,
где h
- значение шага квантования ЦАП. В
этом случае погрешность квантования
также будет составлять 0,5h.
Если входная величина X
после отсчета изменяется, то появляется
динамическая погрешность δДИН,
которая может достигать больших значений
(рис. 2.2). Это накладывает ограничение
на допустимую скорость изменения входной
величины X
исходя из значения возможной
динамической ошибки. Например, δДИН
должна быть меньше шага квантования h,
то необходимо, чтобы
 ,
где
,
где - максимально допустимая скорость
изменения входной величиныX.
Развертывающие АЦП имеют наряду с
простотой аппаратной реализации и
высокой линейностью характеристики
преобразования еще одно достоинство -
в них принципиально не могут возникнуть
автоколебания.
- максимально допустимая скорость
изменения входной величиныX.
Развертывающие АЦП имеют наряду с
простотой аппаратной реализации и
высокой линейностью характеристики
преобразования еще одно достоинство -
в них принципиально не могут возникнуть
автоколебания.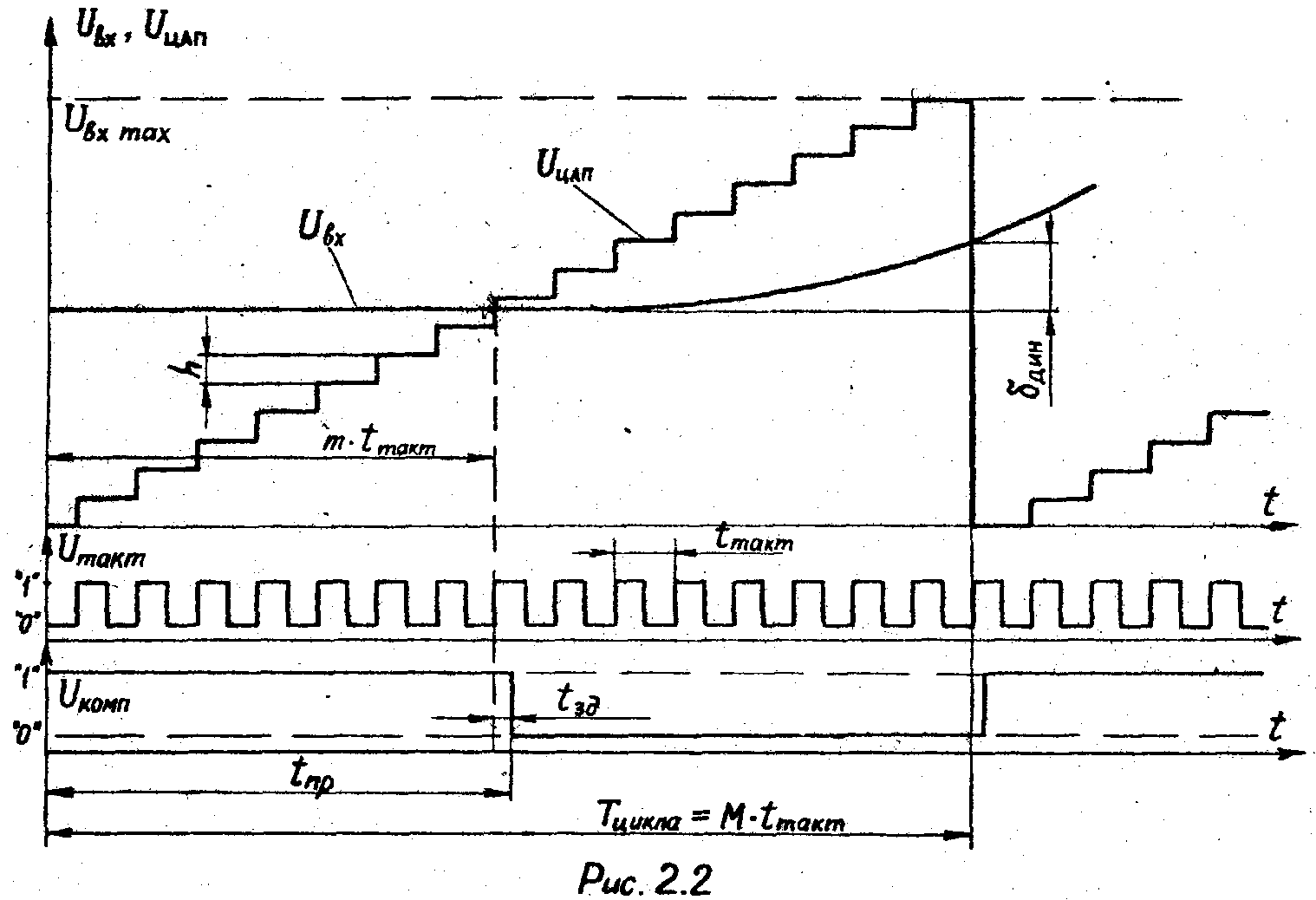
Развертывающие структуры дают хорошие результаты с точки зрения точности, если входной сигнал остается постоянным. Если входной сигнал меняется за время цикла, то полученный отсчет может не соот-вать истинному значению Uвх.
Недостатки развертывающих структур:
1)система все время вынуждена находится в работе, в циклическом режиме работая непрерывно потребляет много энергии.
2)для таких систем характерно наличие систематической погрешности, обусловленной конечным временем записи в регистр-t задержки регистр. Например, у 133ИР1 tзад записи=120 нс.
3)система имеет фиксированную дикретность, равную шагу квантования. Этот недостаток можно исключить, если компенсирующее напряжение линейное.
4)максимальное значение частоты входного сигнала даже при очень высоком значении Ттакт очень небольшое - десятки-сотни Гц.