

ФОПИ _Чередов_1
.pdfФизические основы полученияинформации
При наложении постоянного магнитного поля с напряженностью Н0 вследствие нелинейности кривой намагничивания симметрия индукции нарушается (рис. 4.45б) и при этом в составе кривой индукции появятся четные гармоники. Степень асимметрии зависит от значения напряженности постоянного магнитного поля Н0. Эта зависимость используется при построении магнитомодуляционных преобразователей напряженности или индукции постоянного магнитного поля. Подобные преобразователи получили название феррозондовых. Переменное магнитное поле в феррозондовом преобразователе создается с помощью катушки (возбуждающей катушки), по которой протекает переменный ток.
а |
б |
Рис. 4.45
Феррозондовые преобразователи характеризуются: малой потребляемой мощностью, малыми габаритами, высокой чувствительностью, надежностью работы, высоким КПД и избирательностью к локальным магнитным полям рассеяния.
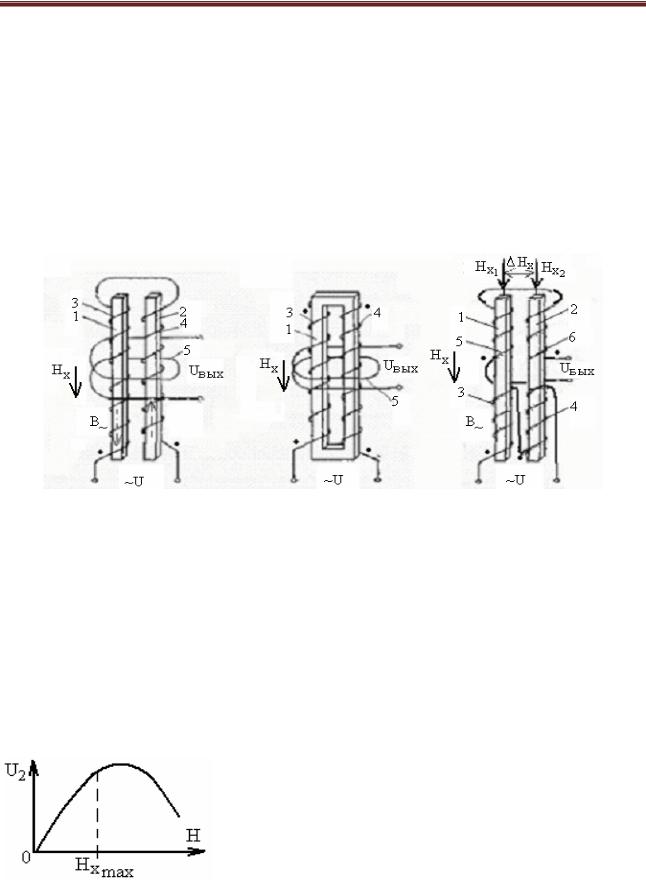
Феррозонд конструктивно состоит из двух идентичных полузондов, каждый из которых содержит сердечник из магнитомягкого материала с размещенными на них двумя катушками. Одна катушка – возбуждающая – подключается к источнику переменного тока, другая – измерительная. На практике широко применяются феррозондовые датчики с одной измерительной катушкой, охватывающей оба сердечника (рис. 4.46а, б).
Существует много разновидностей феррозондовых преобразователей, отличающихся режимом работы, конструкцией, способом наложения вспомогательного магнитного поля.
В зависимости от взаимной ориентации векторов внешнего магнитного поля и магнитного поля возбуждения преобразователя различают феррозонды с продольным и поперечным возбуждением.
Наиболее широкое применение получили дифференциальные феррозонды с продольным возбуждением с разомкнутой (рис. 4.46а) или замкнутой (рис. 4.46б) магнитной цепью [15]. Дифференциальный ферромодуляционный
~171 ~
Физические основы полученияинформации
преобразователь (рис. 4.46а) состоит из двух идентичных ферромагнитных сердечников 1 и 2 с обмотками возбуждения 3 и 4, которые включены последовательно, но встречно, так что создаваемые ими переменные магнитные потоки сдвинуты на 1800. Оба сердечника с обмотками возбуждения (модулирующими обмотками) охватывает измерительная обмотка 5. Синусоидальный ток возбуждения i = Imsinωt создает в обмотках возбуждения 3 и 4 магнитное поле возбуждения (модулирующее поле) Н1 = Н2 = Нmsinωt. Так как характер изменения индукции в обоих сердечниках одинаков, то значения индукций будут одинаковыми, но иметь разные знаки (В1 = −В2), и в измерительной обмотке 5 ЭДС не будет индуктироваться.
а |
б |
в |
|
Рис. 4.46 |
|
При воздействии постоянного магнитного поля НХ (рис. 4.46а) напряженность магнитного поля в первом сердечнике Н1 = Нmsinωt + НХ, а во втором
– Н2 = Нmsinωt - НХ. В этом случае вследствие нелинейности кривой намагничивания значения индукции в стержнях 1 и 2 становятся различными. В измерительной обмотке 5 будет наводиться ЭДС несинусоидальной формы, главная особенность которой состоит в том, что ее период Ти вдвое меньше периода возбуждающего тока. Это означает, что постоянное внешнее подмагничивающее поле Нх обусловливает появление второй гармоники в выходном сигнале
феррозонда. Эта вторая гармоника и является информативной, по действующему (или
|
амплитудному) значению которой судят о |
|
|
напряженности Нх. На рис. 4.47 показана |
|
|
характеристика подобного феррозондового пре- |
|
|
образователя [17]. При Нх = 0 выходной сигнал |
|
|
феррозонда равен нулю. Рабочим является |
|
Рис. 4.47 |
близкий к линейному начальный участок, где |
|
~172 ~ |
||
|

Физические основы полученияинформации
действующее значение второй гармоники U2 пропорционально напряженности Hx, U2 = kHX или U2 = k1BX, где k1 и k2 – коэффициенты, определяемые параметрами феррозондового преобразователя, частотой и значением поля возбуждения. При изменении полярности Нх (Вх) выходное напряжение изменяет фазу на 1800. При значительном увеличении Hx (больше Hx max) происходит насыщение материала сердечника.
В преобразователе, представленном на рис. 4.46б, так как возбуждающие обмотки включены встречно при отсутствии внешнего магнитного поля (Нх = 0), магнитный поток в сердечнике 1 будет равен нулю. В этом случае в измерительной обмотке 5 ЭДС индуктироваться не будет. При воздействии постоянного магнитного поля НХ ≠ 0 суммарный магнитный поток Ф в замкнутом ферромагнитном контуре 1 становится отличным от нуля и в измерительной катушке будет индуктироваться ЭДС. Как и для преобразователя, изображенного на рис. 4.46а, информативной будет вторая гармоника выходного сигнала U2. При превышении напряженности постоянного поля НХ некоторого максимального значения Нx max происходит насыщение материала сердечника и напряжение измерительной обмотки уменьшается практически до нуля.
Феррозондовые преобразователи, применяемые для измерения абсолютной величины напряженности или индукции магнитных полей, получили название феррозонды-полемеры. В них обмотки возбуждения соединяются последовательно и встречно (см. рис. 4.46а, б).
Феррозонды-полемеры являются высокочувствительными магнитоизмерительными преобразователями. Нижний предел измерения феррозондовых ИП для измерения индукции достигает 0,05–0,1 нТл. Верхний предел измерения ограничен нарушением линейности функции преобразования и обычно не превышает 5–10–4 Тл. [15]. Для измерений более сильных полей применяется метод уравновешивания.
Для оценки неоднородности постоянного магнитного поля используются феррозонды-градиентометры, которые по устройству аналогичны феррозондамполемерам и отличаются от них соединением обмоток. В феррозондеградиентометре (рис. 4.46в) обмотки возбуждения 3 и 4 соединены последова- тельно-согласно. Тогда НХ1 = НХ2, а следовательно, и индукция в каждом сердечнике одинаковы в любой момент времени. Измерительные катушки 5 и 6 включены последовательно-встречно, поэтому выходное напряжение катушки этого феррозонда, равное разности ЭДС е1 и е2 в измерительных катушках 5 и 6, равно нулю. Если же напряженность магнитного поля изменяется в направлении Х, перпендикулярном вектору напряженности поля НХ, то напряженность НX1 магнитного поля, действующего на сердечник 1, будет не равна напряженности НX2 магнитного поля, действующего на сердечник 2 . Это приводит к тому, что индукция в каждом сердечнике не будет одинаковой и появится выход-
~173 ~
Физические основы полученияинформации
ной сигнал Uвых = е1 (t) - е2(t). Выходное напряжение, как и в феррозондеполемере, несинусоидально, но главной его особенностью также является наличие второй гармоники. Амплитуда выходного сигнала пропорциональна степени неоднородности внешнего поля, т. е. пропорциональна градиенту G(Х) напряженности магнитного поля [8]:
G(X) |
HX1 HX2 |
|
HX |
, |
(4.112) |
X |
|
||||
|
|
X |
|
||
Х – приращение координаты Х.
Расстояние Х между сердечниками называется базой феррозондового преобразователей. Значение базы составляет единицы миллиметров (3–4 мм).
Диапазон измерения феррозондов-градиентометров составляет единицы – сотни тысяч ампер на метр квадратный.
Погрешности феррозондовых ПИП
Основными причинами появления погрешностей феррозондовых ИП являются: 1) изменение температуры окружающей среды; 2)наводки и шум.
Влияние температуры существенно уменьшается при выполнении феррозондовых ИП дифференциальными. Для уменьшения погрешностей, обусловленных наводками осуществляется симметрирование датчиков феррозондов и защита от наводок измерительных цепей.
Погрешность таких феррозондов-полемеров может достигать значения до 0,01 %. Погрешность феррозондов-градиентометров достигает единиц процентов.
Измерительные цепи феррозондовых ПИП
Во всех случаях применения феррозондов необходимо выделять вторую гармонику выходного сигнала, так как именно она несет информацию о напряженности измеряемого поля. При этом первая гармоника должна подавляться.
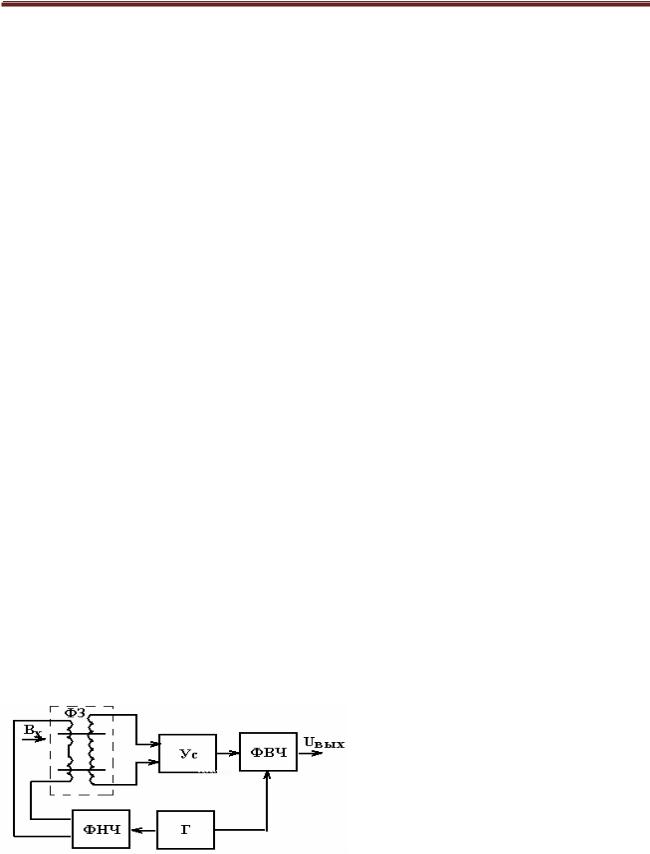
К измерительным цепям феррозондовых ИП предъявляются следующие требования: источник питания возбуждающей обмотки должен характеризоваться низким уровнем четных гармоник в токе возбуждения; измерительная цепь должна выделять вторую гармонику из выходного сигнала феррозондового преобразователя. В качестве примера на рис. 4.48 показана струк-
|
турная схема измерительной цепи |
Рис. 4.48 |
феррозондового тесламетра [15]. |
|
~174 ~
Физические основы полученияинформации
Феррозонд ФЗ питается от генератора переменного тока Г. С помощью фильтра нижних частот ФНЧ снижается уровень четных гармоник в токе возбуждения. ФНЧ имеет максимальное затухание на частоте второй гармоники. Избирательный усилитель Ус, настроенный на частоту второй гармоники, и фазочувствительный выпрямитель ФЧВ выделяют вторую гармонику из выходного сигнала феррозондового преобразователя.
Магнитомодуляционные преобразователи перемещения
Действие преобразователя основано на изменении индуктивности обмотки, намотанной на ферромагнитном сердечнике при перемещении постоянного магнита в зазоре сердечника.
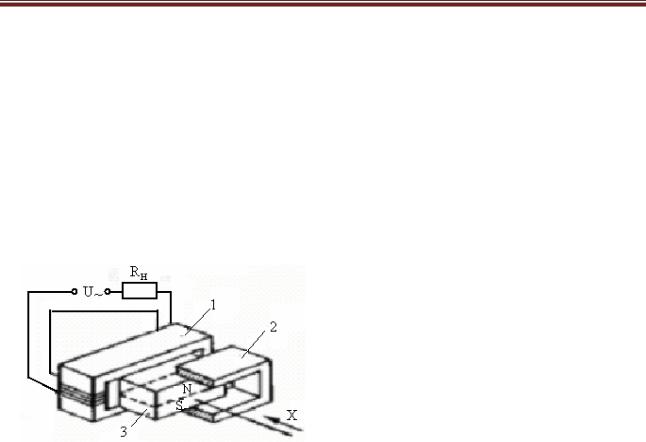
На рис. 4.49 показано устройство магнитомодуляционного преобразователя перемещения [15]. Между двумя сердечниками 1 и 2 расположен постоянный магнит 3. Поток, создаваемый магнитом, замыкается через сердечники. При симметричном положении магнита потоки через сердечники равны и, следовательно, в каждом из сердечников действуют оди-
наковые индукции постоянного подмагничивания: В = 0,5σФ=/(2Sсерд), где Ф= – поток магнита; σ – коэффициент рассеяния и Sсерд – площадь сечения сердечника. На сердечник 1 намотана обмотка с числом витков , а сердечник 2 служит магнитным шунтом. Обмотка через резистор подключена к источнику переменного тока. При перемещении магнита влево индукция в сердечнике 1 увеличивается и магнитная проницаемость материала падает. Магнитное сопроти сопротивление переменному потоку возрастает, индуктивность обмотки падает, ток и падение напряжения на резисторе Rн увеличиваются. Таким образом, входной величиной преобразователя является перемещение магнита, а выходной – падение напряжения на резисторе Rн.
4.8.6. Вихретоковые ПИП
Действие вихретоковых ПИП основано на взаимодействии внешнего электромагнитного поля с электромагнитным полем вихревых токов, наводимых в электропроводящем объекте этим полем. Распределение и плотность вихревых токов определяются источником электромагнитного поля, геометрическими и электромагнитными параметрами объекта контроля (измерения). Обычно в качестве источника электромагнитного поля используется индуктивная катушка с синусоидальным током, называемая вихретоковым преобразователем
(ВТП) [12].
~175 ~
Физические основы полученияинформации
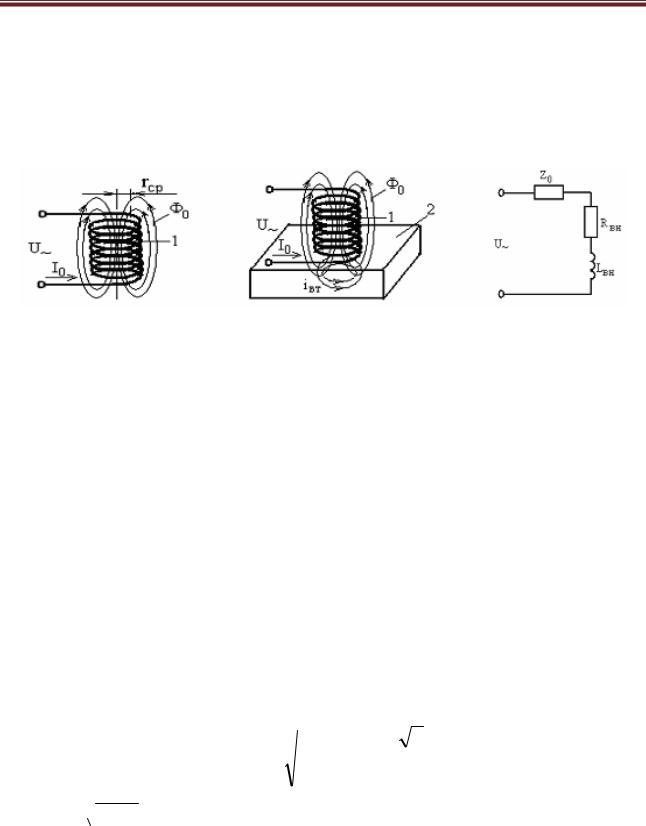
При протекании по катушке импульсного или синусоидального тока I0 и отсутствии вблизи нее электропроводящего объекта (рис. 4.50а) полное сопротивление катушки 1 будет рассчитываться по формуле
Z0 (R0 |
j L0) , |
(4.113) |
где R0 и L0 – собственное сопротивление и индуктивность катушки.
а |
б |
в |
|
Рис. 4.50 |
|
При наличии вблизи объекта измерения 2 такой катушки 1 (рис. 4.50б) электропроводящего объекта силовые линии магнитного поля (поля возбуждения), создаваемого с помощью тока I0 в катушке, охватывают витки катушки и замыкаются через электропроводящий объект. При этом в объекте в поверхностном слое электропроводящего объекта возникают вихревые электрические токи iвт, замыкающиеся по кругу и охватывающие силовые линии поля возбуждения. Плотность и распределение вихревых токов зависят от удельной электропроводности γ, абсолютной магнитной проницаемости μа, зазора h между катушкой и объектом, сплошности материала объекта и других факторов.
Глубина проникновения уменьшается с увеличением частоты. Например, для меди и алюминия при частоте 50 Гц на глубине примерно 10 мм электромагнитное поле затухает на 95 %, а на высоких частотах (500 кГц) глубина проникновения уменьшается до 0,1 мм [15]. На глубинах, больших некоторой максимальной глубины δmax, вихревые токи практически отсутствуют. Максимальную глубину проникновения вихревых токов можно оценить по формуле [8]
δmax |
|
2 |
|
|
rср |
2 |
|
|
|
|
|
|
|
|
|
, |
(4.114) |
||
ωμa γ |
β |
|
|||||||
|
|
|
|
|
|
|
|
||
где β rср 
 ωμа γ ; rср – средний радиус катушки.
ωμа γ ; rср – средний радиус катушки.
Вихревые токи создают свое собственное магнитное поле ФВТ, которое меньше поля возбуждения Ф0 и в каждый момент времени противоположно ему. В результате взаимодействия полей ФВТ и Ф0 (рис. 4.50б) напряженность электромагнитного поля, в котором находится катушка, изменяется. При этом
~176 ~

Физические основы полученияинформации
изменяются сопротивление R и индуктивность L и соответственно индуктивное сопротивление катушки ХL. Взаимодействие индуктивной катушки 1 с объектом 2 можно представить эквивалентной схемой (рис. 4.50в) [12].
Таким образом, присутствие вблизи катушки с переменным током электропроводящей среды приводит к увеличению активного сопротивления R катушки. Если объект контроля является немагнитным электропроводящим объектом, индуктивность L катушки вследствие уменьшения результирующей напряженности электромагнитного поля уменьшается. Если объект выполнен из магнитного материала, то индуктивность L катушки увеличивается:
R1 = R0 + RВН; L1 = L0 ± LВН, |
(4.115) |
где RВН – вносимое в индуктивную катушку активное сопротивление, обусловленное потерями энергии за счет нагрева объекта 2 вихревыми токами;
LВН – вносимая индуктивность, обусловленная изменением потокосцепления индуктивной катушки 1.
Изменение активного R и реактивного X сопротивлений возбуждающей катушки зависит от удельной электрической проводимости γ и магнитной проницаемости μ металла, от частоты f намагничивающего тока, зазора h. Чем больше γ и μ, тем в большей степени изменяются параметры катушки, но тем меньше глубина проникновения вихревых токов в металл. Низкочастотные вихревые токи проникают более глубоко, высокочастотные ограничиваются тонким поверхностным слоем.
Наличие дефектов, т. е. нарушение сплошности материала объекта (например, трещина), приводит к изменению распределения и плотности вихревых токов в объекте контроля. При этом параметры катушки снова изменяются и становятся равными R2 = R0 + RВН + ΔR и L2 = L0 ± LВН + ΔL, что является результатом изначального изменения μ и γ в зоне дефекта (трещины).
Определяя изменения активного и индуктивного сопротивления катушки, можно получить информацию о характере дефекта, электромагнитных параметрах материала объекта и других величинах.
Классификация вихретоковых преобразователей
Вихретоковый преобразователь (ВТП) – это устройство, содержащее несколько обмоток, предназначенных для возбуждения в объекте контроля вихревых токов и преобразования, зависящего от параметров объекта электромагнитного поля в сигнал преобразователя [31]. Обязательно одна из обмоток – обмотка возбуждения – обтекается переменным током от соответствующего генератора. Принцип работы многообмоточных ВТП не отличается от одноили двухобмоточных.
~177 ~

Физические основы полученияинформации
ВТП могут быть классифицированы по следующим признакам: 1) по типу преобразования параметров объекта в выходной сигнал; 2) по способу соединения обмоток; 3) в зависимости от расположения ВТП по отношению к объекту.
По типу преобразования параметров объекта в выходной сигнал ВТП подразделяются на параметрические и трансформаторные.
Параметрические – это ВТП с одной катушкой индуктивности, по параметрам которой судят о качестве объекта. Выходным сигналом является изменение полного сопротивления катушки ВТП.
Трансформаторные – ВТП, содержащие две (или более) катушки индуктивности, одна из которых (возбуждающая) служит для создания электромагнитного поля, а следовательно, вихревых токов в объекте, а другая (измерительная) – для измерения ЭДС, наводимой в ней результирующим магнитным потоком, пронизывающим ВТП. Измерительная катушка играет роль вторичной обмотки трансформатора. Информативным параметром выходного сигнала преобразователя является изменение амплитуды и фазы синусоидального напряжения в измерительной катушке, которые зависят от параметров объекта.
Достоинством параметрических ВТП является простота, а к недостаткам можно отнести зависимость выходного сигнала от температуры преобразователя. Трансформаторные ВТП характеризуются меньшей зависимостью выходного сигнала от температуры [8].
По способу соединения обмоток ВТП разделяются на абсолютные и дифференциальные.
Абсолютные – это ВТП, выходной сигнал которых определяется абсолютными значениями параметров объекта в зоне контроля. Они имеют возбуждающую 1 и измерительную 2 обмотки (рис. 4.51а).
Дифференциальные – это ВТП, имеющие одинаковые возбуждающие обмотки 1, соединенные последовательно-согласно, и две одинаковые измерительные 2 (рис. 4.51б). Здесь влияние «плавных» изменений γ и μ значительно уменьшено, так как выходной сигнал определяется разностью параметров объекта контроля в зоне контроля, что резко повышает отношение «сигнал/помеха».
а б 1 – возбуждающая обмотка; 2 – измерительная обмотка; 3 – объект
Рис. 4.51
~178 ~
Физические основы полученияинформации
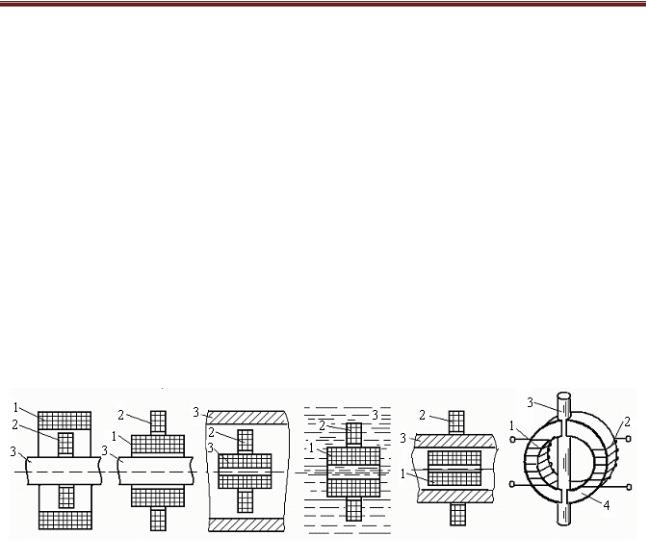
В зависимости от расположения ВТП по отношению к объекту контроля ВТП разделяются на проходные, накладные, экранные и комбинированные.
Проходные разделяют на наружные, внутренние и погружные.
На рис. 4.52 показаны разновидности трансформаторных проходных ВТП. Катушки проходных наружных ВТП (рис. 4.52а, б) охватывают объект. Катушки проходных внутренних ВТП (рис. 4.52в) вводят внутрь объекта. Погружные (рис. 4.52г) используют для контроля жидких электропроводящих сред, куда их и помещают. В экранных проходных ВТП возбуждающие и измерительные катушки располагают по разные стороны объекта (рис. 4.52д). В указанных конструкциях ВТП измерительная катушка может располагаться внутри возбуждающей катушки (рис. 4.52а) или охватывать измерительную катушку (рис. 4.52б). К проходным можно отнести и так называемые «щелевые» ВТП с магнитопроводом (рис. 4.52е), охватывающим протяженный объект.
Наружные, внутренние и погружные ВТП могут быть как параметрическими, так и трансформаторными. Экранные ВТП могут быть только трансформаторными.
а б в г д е 1 – возбуждающая катушка; 2 – измерительная катушка; 3 – объект;
4 – магнитопровод Рис. 4.52
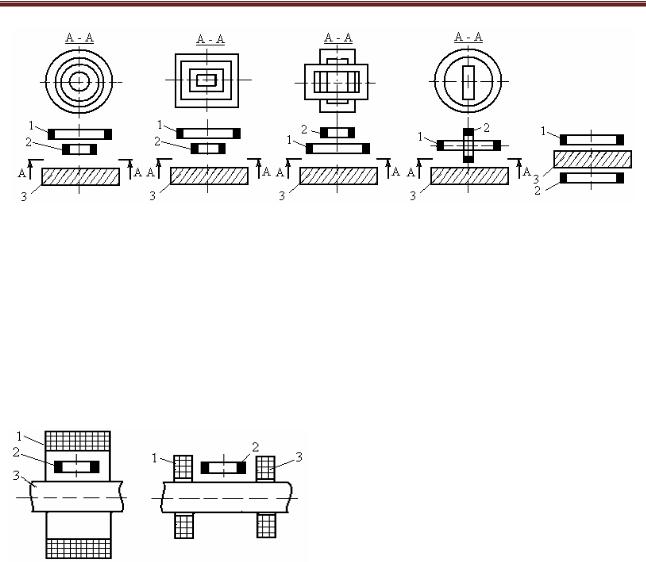
Накладные ВТП располагают вблизи поверхности объекта, они имеют одну или несколько обмоток, которые располагаются на одной стороне детали. Их прикладывают торцом, т. е. осью перпендикулярно контролируемой поверхности. Возможно и продольное расположение накладных ВТП, когда оси катушек направлены вдоль контролируемой поверхности. Катушки накладных ВТП могут быть круглыми коаксиальными (рис. 4.53а), прямоугольными (рис. 4.53б), прямоугольными крестообразными (рис. 4.53в), с взаимно перпендикулярными осями (рис. 4.53г). Возбуждающая и измерительная катушки накладных ВТП могут располагаться по разные стороны от объекта (рис. 4.53, д). Такие преобразователи называются экранными.
~179 ~
Физические основы полученияинформации
а б в г д 1 – возбуждающая катушка; 2 – измерительная катушка; 3 – объект Рис. 4.53
Накладные ВТП выполняют с ферромагнитными сердечниками и без них. Благодаря сердечнику (обычно ферритовому) повышается абсолютная чувствительность к изменению контролируемых параметров и формируется электромагнитное поле заданной топологии. Иногда сердечники используются для ло-
кализации магнитного поля с целью уменьшения зоны контроля. |
|
|
|||
|
|
Комбинированные ВТП |
представ- |
||
|
|
ляют собой сочетание проходных воз- |
|||
|
|
буждающих катушек и накладных из- |
|||
|
|
мерительных катушек. |
Конструкции |
||
|
|
комбинированных |
ВТП |
представлены |
|
|
|
на рис. 4. 54. Комбинированные ВТП |
|||
|
|
характеризуются |
большой |
зависимо- |
|
а |
б |
стью выходного |
сигнала |
от |
перекоса |
осей проходных и накладных катушек |
|||||
1 – возбуждающая катушка; 2 – из- |
ВТП относительно поверхности объек- |
||||
мерительная катушка; 3 – объект |
та. Данные преобразователи |
большого |
|||
|
Рис. 4.54 |
распространения не получили. |
|
||
|
|
|
|
|
|
Катушки ВТП по отношению друг к другу могут быть подвижными и неподвижными. Подвижные катушки могут вращаться как внутри, так и вокруг неподвижных катушек. Преобразователи, у которых подви катушки вращаются внутри неподвижных, называются ротор-
ными.
Использование роторных ВТП позволяет осуществлять сканирование (круговое) поверхности детали (даже в том случае, когда ВТП по поверхности детали не перемещается. Кроме того, вращение катушек в процессе контроля приводит к дополнительной модуляции сигнала ВТП, которая различна для помех и сигналов. Это позволяет снизить влияние помех и повысить достоверность контроля [8].
~180 ~