

ФОПИ _Чередов_1
.pdfФизические основы полученияинформации
стабильная емкость С1, значение которой определяется допустимой погрешностью чувствительности γS = (∆С0 + ∆Ск)/(С0 + +Ск + С1). Таким образом, входное напряжение усилителя и чувствительность преобразователя S = Uвх/F при заданной нестабильности емкости определяются допустимой погрешностью.
Важной характеристикой измерительной цепи является постоянная времени τ = RC. Учитывая, что в значении сопротивления Rэ определяющим, как правило, является сопротивление поверхностной утечки пьезоэлектрического преобразователя, значение Rэ обычно не превышает 109 Ом. Поэтому даже при емкости С = 1000 пФ постоянная времени τ ≤ 1 с [19]. Кроме того, на выходной сигнал схемы большое влияние оказывают емкость кабеля и входной импеданс усилителя. Применяя в качестве измерительной цепи усилитель заряда (рис. 4.33б), можно существенно уменьшить влияние указанных факторов.
Если коэффициент усиления k0 используемого операционного усилителя очень велик, то входное напряжение будет пренебрежимо малым при конечном выходном напряжении Uвых. Пренебрегая импедансами кабеля и усилителя, получим, что выходной заряд датчика полностью стечет через цепь C1, R2. В этом случае выходное напряжение можно выразить формулой [1]
|
d |
j C1R1 . |
|
||
Uвых |
11 |
|
|
F. |
(4.85) |
|
|
||||
|
C1 |
1 j R1C1 |
|
||
Данная схема позволяет получить большое значение постоянное времени τ = С1. R1. Реальные постоянные времени датчиков с усилителями заряда составляют 10–100 с, что позволяет проводить квазистатическую градуировку пьезоэлектрических датчиков. К достоинствам данной схемы следует отнести независимость выходного напряжения от емкости (С0 + Ск) и возможность увеличения чувствительности при уменьшении емкости С1, однако применять емкости, меньшие 50–100 пФ, нецелесообразно, так как при этом заметное влияние начинают оказывать паразитные емкости [15].
Достоинствами пьезоэлектрических датчиков являются: малые габариты, простота конструкции, высокая надежность, возможность измерять быстропеременные процессы, высокая точность преобразования механических напряжений в электрический заряд. Например, для ИП из кварца погрешность преобразования составляет 10-4 – 10-6.
К недостаткам следует отнести: невозможность измерять статические величины, наличие нелинейности и гистерезиса, трудность градуировки, сложность экранировки и защиты от помех и наводок, необходимость в качественных усилителях.
~151 ~

Физические основы полученияинформации
4.8. ЭЛЕКТРОМАГНИТНЫЕ ПИП
Электромагнитный (ЭМ) преобразователь представляет собой один или несколько контуров, находящихся в магнитном поле, которое может быть создано как токами, протекающими по контурам, так и внешним источником.
По числу контуров, находящихся в магнитном поле, электромагнитные ПИП разделяются на одноконтурные и многоконтурные (чаще используются двухконтурные ПИП). Выходной величиной одноконтурного ЭМ преобразователя может быть: индуктивность L, электромагнитная сила FЭМ и индуктируемая в контуре ЭДС еинд Выходной величиной двухконтурного ЭМ преобразователя является ЭДС, индуктируемая в одном из контуров при пропускании переменного тока по другому контуру [15].
При введении в магнитное поле контура ферромагнитного сердечника его индуктивность, которая определяется как L n2 / Rм (n – число витков кон-
тура; Rм – полное магнитное сопротивление ЭМ преобразователя), изменяется. Это свойство может быть использовано при построении различных измерительных преобразователей, которые называются индуктивными.
Изменение магнитного сопротивления может также осуществляться за счет изменения параметров (например, магнитной восприимчивости) ферромагнитного сердечника под действием внешних факторов, например при его деформации, что используется в ПИП сил и давлений. Подобные преобразователи получили название магнитоупругих.
Магнитная проницаемость ферромагнитного сердечника также зависит и от значения напряженности магнитного поля в материале, которое может создаваться внешним магнитным полем и током, протекающим через преобразователь. При этом индуктивность контура будет зависеть как от тока, текущего через преобразователь и создающего собственное магнитное поле, так и от напряженности внешнего магнитного поля. Такие преобразователи называются
магнитомодуляционными.
В контуре, находящемся во внешнем магнитном поле, при изменении потокосцепления возникает индуктированная ЭДС еинд. При неподвижном контуре ЭДС будет индуктироваться только в переменном магнитном поле. В постоянном магнитном поле ЭДС индуктируется только в движущемся контуре. В этом случае для измерения индукции В контуру задают принудительное движение, например вращение с постоянной скоростью. Это свойство контура используется для построения ПИП различных физических величин (индукции переменного и постоянного магнитного поля, скорости вращения и др.). Преобразователи, в которых индуктированная ЭДС обусловлена изменением потокосцепления, называются индукционными.
~152 ~

Физические основы полученияинформации
Преобразователи, содержащие два или более контуров, называют транс-
форматорными или взаимоиндуктивными.
В двухконтурном преобразователе при пропускании переменного тока i через первый контур во втором контуре будет индуктироваться ЭДС, зависящая от угла α между плоскостями контуров и максимальная при совпадении этих плоскостей. Поток Ψ2, с которым сцепляется второй контур при прохождении тока i1 по первому контуру, находится как [15]
Ψ2 = M12i1 , |
(4.86) |
где M12 – коэффициент взаимоиндуктивности.
Неоднородность структуры ферромагнитного сердечника вызывает скачки намагниченности материала. Скачкообразное изменение намагниченности, т. е. возникновение магнитных шумов (шумов Баркгаузена) происходит как при изменениях напряженности внешнего магнитного поля, так и при наличии механических воздействий. Скачкообразное изменение намагниченности может быть использовано для построения датчиков различных физических величин. Выходной величиной этих преобразователей является ЭДС магнитного шума.
В соответствии с принципом действия и исходными уравнениями электромагнитные преобразователи могут быть подразделены на следующие большие группы: 1) индуктивные и взаимоиндуктивные преобразователи; 2) магнитоупругие преобразователи; 3) индукционные преобразователи; 4) магнитомодуляционные преобразователи; 5) преобразователи, использующие эффект Баркгаузена.
4.8.1. Индуктивные ПИП
Принцип действия, конструкции, достоинства и недостатки
Принцип действия индуктивных ПИП основан на изменении собственной индуктивности катушки при изменении взаимного расположения ферромагнитных элементов преобразователя под действием входной неэлектрической величины.
В общем случае индуктивный преобразователь состоит из катушки индуктивности, магнитопровода и подвижного ферромагнитного сердечника (якоря). Входная величина Х изменяет взаимное расположение катушки и якоря или отдельных частей магнитопровода. При этом изменяется индуктивность катушки и ее полное сопротивление.
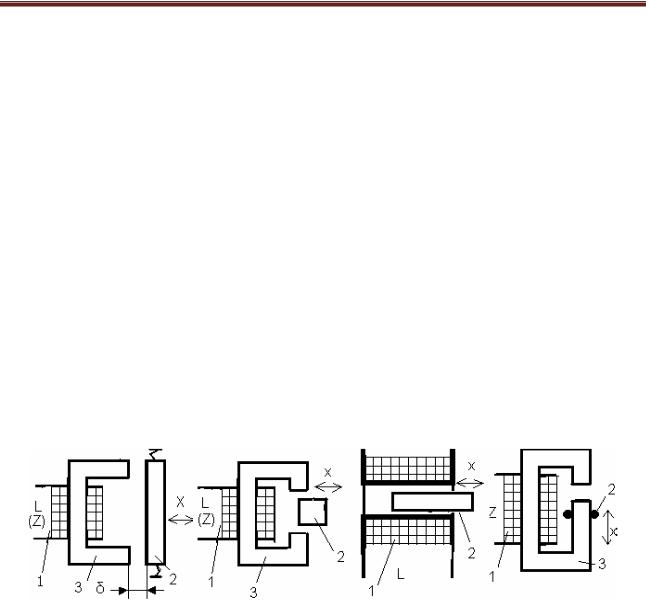
На рис. 4.34 представлены различные варианты конструктивного исполнения индуктивных ИП: с переменной длиной воздушного зазора (рис. 4.34а); с переменной площадью воздушного зазора (рис. 4.34б); соленоидальный (рис. 4.34в); с распределенными параметрами (рис. 4.34г).
~153 ~
Физические основы полученияинформации
Впреобразователях с переменной длиной или площадью воздушного зазора
(рис. 4.34а, б) входная величина вызывает перемещение Х якоря 2. В результате этого изменяется магнитное сопротивление системы, что приводит к изменению индуктивности катушки 1, размещенной на магнитопроводе 3.
Соленоидальные индуктивные ИП представляют собой преобразователи с разомкнутой магнитной цепью (рис. 4.34в) и работают на принципе изменения магнитного сопротивления участков рассеяния магнитного потока при перемещении якоря 2. ПИП данного типа допускают весьма большие перемещения до единиц метров.
Впреобразователях с распределенными параметрами (рис. 4.34в) измене-
ние магнитного сопротивления происходит вследствие размагничивающего действия вторичных токов. В таких индуктивных ИП вместо ферромагнитного якоря перемещается короткозамкнутый виток 2 (рис. 4.34г). При этом в витке индуцируются токи, которые создают потери, что приводит к появлению дополнительного реактивного сопротивления магнитной цепи. Вместо витка в зазор магнитопровода можно вводить электропроводный элемент (например, диск из меди или алюминия), в котором наводятся вторичные токи.
а |
б |
в |
г |
Рис. 4.34
Наиболее распространенными являются преобразователи с переменной длиной воздушного зазора. Рассмотрим их работу.
Входная неэлектрическая величина Х изменяет взаимное расположение катушки 1, намотанной на магнитопровод 3, и подвижного якоря 2. При этом изменяется длина воздушного зазора и магнитное сопротивление системы, что приводит к изменению индуктивности катушки 1, которая определяется по формуле
L = n2/RМ, |
(4.87) |
где n – число витков катушки; RМ – магнитное сопротивление преобразователя.
~154 ~

Физические основы полученияинформации
Пренебрегая рассеянием магнитного поля и нелинейностью кривой намагничивания материала магнитопровода и якоря, получим выражение для магнитного сопротивления в виде
R |
м |
R |
R |
з |
|
|
|
lст |
|
2 |
|
, |
(4.88) |
||
|
|
|
|
A |
|
||||||||||
|
ст |
|
|
0 |
|
A |
|
з |
|
||||||
|
|
|
|
|
|
|
|
r ст |
|
|
0 |
|
|||
где Rст – магнитное сопротивление участков магнитопровода и ферромагнитного сердечника; RЗ – магнитное сопротивление воздушных зазоров; lст – длина средней силовой линии по магнитопроводу и якорю; Аст – площадь поперечного сечения магнитопровода и якоря (магнитопровод и якорь имеют одинаковую площадь поперечного сечения); r – магнитная проницаемость материала магнитопровода и якоря; 0 – магнитная постоянная; – длина воздушного зазора; Аз – площадь поперечного сечения воздушного зазора.
Выполнив условие Аст = Аз=А и переходя к сопротивлению катушки индуктивности, пренебрегая активным сопротивлением катушки, из уравнения
(4.86) получим:
|
|
0 An2 |
j 0 An2 |
|
||
L |
|
|
; Z j L |
|
. |
(4.89) |
|
|
|
||||
|
lст / r 2 |
lст / r 2 |
|
|||
Учитывая, что 2 >> lст/ r (так как r велико), получим
L |
0 An2 |
; Z |
j 0 An2 |
. |
(4.90) |
|
|
2 2
К достоинствам индуктивных датчиков можно отнести: 1) большой диапазон измеряемых линейных и угловых перемещений; 2) большую мощность выходного сигнала (до единиц ватт), что позволяет обойтись без дополнительного усиления; 3) высокую чувствительность; 4) надежность; 5) возможность питания от сети (для многих случаев).
Недостатками индуктивных датчиков являются: 1) большая инерционность; 2) наличие электромагнитных сил притяжения.
Основные характеристики и области применения индуктивных ПИП
Из (4.89) видно, что функция преобразования индуктивного преобразователя с изменяющимся зазором нелинейная. Зависимость сопротивления Z от длины воздушного зазора близка к гиперболической. В подобных ИП при начальном зазоре 0 практически линейный участок составляет (0,1–0,15) 0 . А относительное изменение сопротивления Z/Z из-за наличия активного сопротивления обмотки, потока утечки и магнитного сопротивления якоря в 2–5 раз меньше относительного изменения зазора / 0 [15].
~155 ~

Физические основы полученияинформации
Данные преобразователи характеризуются высокой чувствительностью, но сравнительно малым диапазоном измерения. Они используются при малых перемещениях от единиц микрометров до единиц миллиметров (до 10 мм). Погрешность индуктивных датчиков достигает 0,1 % .
Выходной величиной индуктивного преобразователя может быть изменение индуктивности ИП или изменение его сопротивления. Из уравнений (4.89) можно определить чувствительность SL и SZ преобразователя к изменению длины воздушного зазора.
Индуктивные датчики с изменяющейся площадью воздушного зазора обладают линейной функцией преобразования и применяются при измерении перемещений от 5 до 20 мм.
Преобразователи с разомкнутой магнитной цепью (соленоидальные ИП) имеют худшие характеристики, по сравнению с преобразователями с изменяющимися и А. Это обусловлено следующими причинами: 1) магнитный поток в основном замыкается через воздух, вследствие этого их чувствительность ниже; 2) в связи с большим рассеянием магнитного потока эти датчики подвержены сильному влиянию внешних магнитных полей; 3) катушка имеет большую собственную распределенную емкость, что на повышенных частотах может привести к резонансу.
Функция преобразования нелинейная. Подобные преобразователи применяются для измерения больших линейных перемещений (до единиц метров).
Преобразователи с распределенными параметрами используются для измерения больших линейных перемещений. Индуктивные ПИП с электропроводным диском используются для измерения угловых перемещений до 180– 360О. Изменяя профиль диска, можно получить любой вид зависимости индуктивности от угла поворота диска.
Кроме измерения линейных и угловых перемещений индуктивные преобразователи используются для измерения размеров, толщины ферромагнитных изделий, толщины немагнитных покрытий на ферромагнитном материале, сил и крутящих моментов, ускорений и параметров вибраций.
Погрешности индуктивных ПИП
Среди погрешностей индуктивных датчиков можно выделить следующие: 1) температурную погрешность, обусловленную температурным изменением активного сопротивления катушки, магнитной проницаемости материала магнитопровода, якоря и размеров магнитной цепи; 2) погрешность, обусловленную действием силы притяжения якоря; 3) погрешность линейности функции преобразования. При работе индуктивных преобразователей в мостовых схемах возникает погрешность, обусловленная нестабильностью напряжения и частоты питания моста, а также изменением формы кривой питающего напряжения.
~156 ~
Физические основы полученияинформации
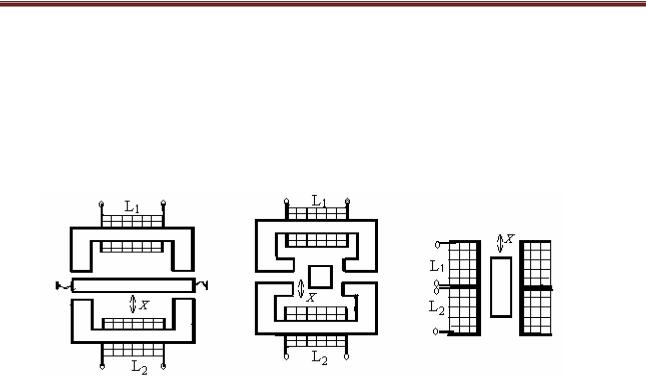
Для улучшения свойств индуктивных ИП используются дифференциальные преобразователи. Они состоят из двух одинарных преобразователей, имеющих общий подвижный элемент. На рис. 4.35 показаны конструкции дифференциальных ИП с изменяющейся длиной воздушного зазора (рис. 4.35а), с изменяющейся площадью воздушного зазора (рис. 4.35б), с разомкнутой магнитной цепью (рис. 4.35в).
а |
б |
в |
|
Рис. 4.35 |
|
В дифференциальных преобразователях при перемещении подвижного якоря под действием входной величины индуктивность одной катушки, например L1, возрастает, а второй L2 уменьшается. При включении в измерительную цепь выходной сигнал пропорционален разности выходных сигналов каждого преобразователя. Дифференциальные преобразователи позволяют существенно уменьшить погрешности, повысить чувствительность и увеличить линейный участок характеристики. Линейный участок составляет (0,3–0,4) о.
На практике индуктивные измерительные преобразователи обычно выполняются дифференциальными.
Измерительные цепи индуктивных ПИП
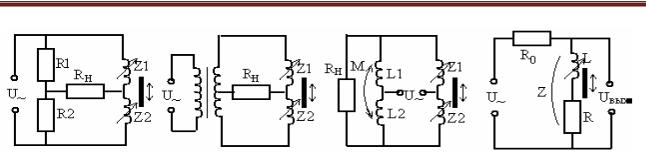
Основными измерительными цепями индуктивных ИП являются мостовые цепи (рис. 4.36а, б, в). Иногда индуктивный преобразователь включается в делитель напряжения (рис. 4.36г) или колебательный L–C контур генератора. Наиболее распространенной является мостовая измерительная цепь, работающая в неравновесном режиме, при этом ток в нагрузке сдвинут по фазе относительно напряжения питания. Уравновешивание моста в начальном положении производится по двум составляющим.
~157 ~
Физические основы полученияинформации
а |
б |
в |
г |
Рис. 4.36
4.8.2. Трансформаторные (взаимоиндуктивные) ПИП
Принцип действия, конструкции, достоинства и недостатки Принцип действия трансформаторных (взаимоиндуктивных) ПИП осно-
ван на изменении взаимной индуктивности между двумя обмотками под действием входного сигнала. Одна из обмоток является намагничивающей, а с другой снимается напряжение.
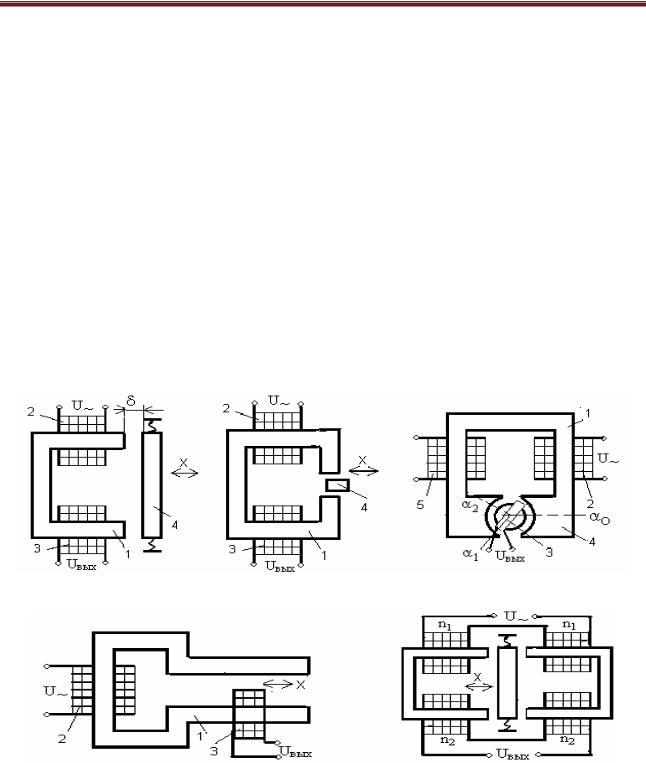
Конструкции магнитной цепи трансформаторных и индуктивных преобразователей одинаковы, отличаются они числом обмоток. Трансформаторные ПИП с изменяющимся воздушным зазором (рис. 4.37а) и переменной площадью воздушного зазора (рис. 4.37б) состоят из магнитопровода 1, на который намотаны две обмотки, одна из которых 2 является намагничивающей, а с другой 3 снимается выходное напряжение, и подвижного якоря 4 из ферромагнитного материала. Перемещение якоря 4 изменяет полное сопротивление магнитной цепи ZМ и соответственно взаимную индуктивность М между обмотками. При протекании тока J1 по намагничивающей обмотке 2 в обмотке 3 индуктируется напряжение:
Uвых J1M1,2 |
J1 |
n1n2 |
, |
(4.91) |
|
||||
|
|
Rм |
|
|
где n1 и n2 – число витков обмотки возбуждения и вторичной обмотки; – частота.
Подставив в (4.90) выражение для магнитного сопротивления (4.87), получим уравнение преобразования трансформаторного преобразователя с переменным воздушным зазором (рис. 4.37а):
Uвых |
J1 0 An1n2 |
|
J1 0 An1n2 |
. |
(4.92) |
2 lст / r |
|
||||
|
|
2 |
|
||
В преобразователе (рис. 4.37в) обмотка 3 выполнена в виде рамки, которая может поворачиваться в зазоре полюсных наконечников 4. При включении обмотки 2 в цепь переменного тока в обмотке 3 наводится ЭДС Е2. При повороте
~158 ~
Физические основы полученияинформации
рамки 3 значение выходного напряжение Uвых изменяется. Функция преобразования трансформаторного преобразователя с подвижной обмоткой может быть записана в виде [15]
Uвых |
2n2U~ |
, |
(4.93) |
|
|||
|
n1 |
|
|
где – угол поворота рамки относительно горизонтального положения 0.
В крайних положениях рамки ( 1 и 2) индуктированное в обмотке 3 напряжение имеет максимальное значение. В горизонтальном положении рамки ( 0) ЭДС Е2 равна нулю, причем при переходе рамки через горизонтальное положение ЭДС меняет фазу на 180О. Для сдвига характеристики преобразования последовательно с обмоткой 3 включают дополнительную обмотку 5. В данных преобразователях могут быть использованы ферродинамические измерительные механизмы и сами преобразователи иногда называют ферродинамическими.
а |
б |
в |
г |
д |
Рис. 4.37
В преобразователе с распределенными параметрами (рис. 4.37г) [15] при перемещении подвижной обмотки в воздушном зазоре изменяется полный поток, сцепляющийся с витками подвижной обмотки. Если магнитное сопротивление участка магнитопровода 1, по которому перемещается подвижная обмот-
~159 ~

Физические основы полученияинформации
ка 3, мало по сравнению с магнитным сопротивлением воздушного зазора, то зависимость индуктированного напряжения практически линейно зависит от перемещения обмотки 3. Изменяя профиль магнитопровода, можно получить заданную функцию преобразования трансформаторного ИП.
Кдостоинствам трансформаторных ИП можно отнести: 1) отсутствие гальванической связи между цепями питания и выхода; 2) возможность их использования без измерительных схем.
Кнедостаткам относится влияние перемещения подвижного якоря на ток
впервичной цепи.
Область применения трансформаторных ПИП аналогична области применения индуктивных ИП.
Погрешности трансформаторных ПИП
Погрешности трансформаторных ИП обусловлены теми же причинами, что и индуктивных ИП. Кроме этих погрешностей трансформаторные преобразователи имеют погрешности: 1) обусловленные протеканием тока во вторичной обмотке и изменением ее сопротивления; 2) изменением тока в первичной цепи при перемещении якоря.
Для уменьшения погрешности, вызванной изменением тока в первичной цепи, необходимо включить в цепь высокоомный добавочный резистор. Уменьшение погрешности из-за тока во вторичной цепи достигается использованием измерительного прибора или вторичного преобразователя с большим входным сопротивлением.
Для улучшения характеристик трансформаторных датчиков используются дифференциальные преобразователи. На рис. 4.37д показан пример преобразователя с переменной длиной воздушного зазора. Первичные обмотки включены между собой последовательно, а вторичные включены встречно. Последовательное соединение первичных обмоток позволяет существенно уменьшить погрешность, обусловленную изменением тока в первичной цепи. При таком включении сопротивление одной первичной обмотки возрастает, а второй уменьшается примерно на ту же величину, и в целом сопротивление остается неизменным, т. е. ток в первичной цепи остается постоянным.
В дифференциальных трансформаторных датчиках суммарное напряжение на выходе
Uвых U1,2 U2,2 n2 (Zм2 Zм1), (4.94)
Zм1Zм2
где Zм1 и Zм2 – магнитные сопротивления 1 и 2 преобразователя.
~160 ~