

Ускорение
При прямолинейном движении быстрота
изменения величины скорости
![]() характеризуется
ускорениема– изменением величины
скорости за единицу времени.
характеризуется
ускорениема– изменением величины
скорости за единицу времени.
В случае произвольного криволинейного движения вектор скорости может меняться по величине и по направлению.
Быстрота изменения вектора скорости в
этом случае характеризуется вектором
ускорения
![]() ,
расчленяемым на две составляющие,
определяющие в отдельности быстроту
изменения скорости по величине и быстроту
изменения скорости по направлению.
,
расчленяемым на две составляющие,
определяющие в отдельности быстроту
изменения скорости по величине и быстроту
изменения скорости по направлению.
Н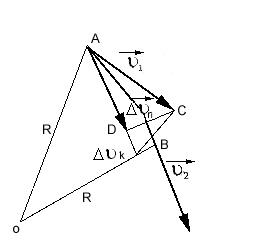 а
рисунке 3 изображен отрезок траектории
между двумя соседними бесконечно
близкими точкамиАиВ. Скорости
в этих точках
а
рисунке 3 изображен отрезок траектории
между двумя соседними бесконечно
близкими точкамиАиВ. Скорости
в этих точках![]() и
и![]() направлены по касательным к траектории
в этих точках и отличаются по величине
и по направлению.
направлены по касательным к траектории
в этих точках и отличаются по величине
и по направлению.
Рисунок 3
Причем рассматриваем случаи, когда
скорость в точке Вбольше по величине.
Перенесем вектор![]() параллельно самому себе в точкуА.
Соединяя конец вектора
параллельно самому себе в точкуА.
Соединяя конец вектора![]() с концом вектора
с концом вектора![]() ,
получаем вектор
,
получаем вектор![]() =
=![]() -
-![]() .
.
Это геометрическое приращение вектора
![]() за
время
за
время![]() .
.
Тогда аср=![]() .
Это отношение называется средним
ускорением. Переходя к пределу, выражают
мгновенное ускорение:
.
Это отношение называется средним
ускорением. Переходя к пределу, выражают
мгновенное ускорение:
а=![]() =
=![]() .
(7)
.
(7)
Откладывая на перенесенном векторе
![]() отрезок, численно равный длине вектора
отрезок, численно равный длине вектора![]() ,
видим, что вектор
,
видим, что вектор![]() может быть представлен как геометрическая
сумма двух векторов:
может быть представлен как геометрическая
сумма двух векторов:
![]() =
=![]() -
-![]() ,
(8)
,
(8)
где
![]() - численно равен изменению величины
скорости за
- численно равен изменению величины
скорости за![]() :
:![]() =
=![]() -
-![]() .
.
Если величина скорости не меняется, то
![]() =0,
=0,![]() =0.
=0.
![]() характеризует изменение направления
вектора скорости
характеризует изменение направления
вектора скорости![]() за
время
за
время![]() .
Он направлен в сторону вогнутости
траектории. В выражение (7) поставим
значение
.
Он направлен в сторону вогнутости
траектории. В выражение (7) поставим
значение![]() из (8):
из (8):
![]() =
=![]() =
=![]() +
+![]() =
=![]() +
+![]() .
(9)
.
(9)
Вектор
![]() =
=![]() также направлен по касательной к
траектории, а модуль этого вектора равенаk=
также направлен по касательной к
траектории, а модуль этого вектора равенаk=![]() - тангенциальное ускорение.
- тангенциальное ускорение.
Для определения второй составляющей в
уравнении (9) восстановим перпендикуляры
к касательным в точках АиВдо
пересечения их в точкеО. Малая дуга![]() S
= АВесть отрезок окружности с центром
в точкеОи радиусомОА=ОВ=R.
S
= АВесть отрезок окружности с центром
в точкеОи радиусомОА=ОВ=R.
Треугольники АОВиСАDподобны, т.к. имеют одинаковые углы при вершине (углы со взаимно перпендикулярными сторонами).
Тогда
![]() или
или
![]() =
=![]() ,
,![]() =
=![]() .
Делим на
.
Делим на![]() :
:![]() =
=
![]() .
.
Переходя к пределу :
аn=![]() =
=![]() =
=
![]()
![]() =
=![]() (10)
(10)
Таким образом, численное значение нормального ускорения в данной точке равно квадрату скорости, деленному на радиус кривизны в той же точке:
аn=![]()
Вектор ускорения есть векторная сумма нормального и тангенсального ускорения (уравнение 9).
![]() =
=![]() =
=![]() +
+![]() =
=![]() +
+![]() .
.
Движущиеся системы отсчета
Рассмотрим движение материальной точки относительно системы отсчета, которая сама движется равномерно и прямолинейно относительно другой, покоящейся, например, относительно Земли. Систему отсчета, связанную с Землей, условно назовем «неподвижной», и скорость относительно этой неподвижной системы назовем «абсолютной» скоростью. Термин «абсолютный» взят в кавычки, поскольку в мире нет абсолютного покоя и абсолютного движения.
Скорость тела относительно движущейся системы отсчета назовем относительной. Отсчет времени полагаем в обеих системах одинаковым. Хотя такое предположение и подвергнуто критике А. Эйнштейном, но в рамках классической механики применительно к макротелам, движущимся со скоростями малыми по сравнению со скоростью света, его можно считать справедливым.
Если за промежуток времени
![]() перемещение материальной точки
относительно подвижной системы
перемещение материальной точки
относительно подвижной системы![]() ,
то за это же время сама система сместилась
относительно «неподвижной» на расстояние
,
то за это же время сама система сместилась
относительно «неподвижной» на расстояние![]() .
.
Тогда перемещение
![]() материальной точки относительно
«неподвижной» системы
материальной точки относительно
«неподвижной» системы![]() =
=![]() +
+![]() ,
а средняя «абсолютная» скорость
,
а средняя «абсолютная» скорость![]() =
=
![]() =
=
![]() +
+
![]() приt
0
приt
0
![]() =
=![]() +
+![]() ,
(11)
,
(11)
где
![]() - «переносная» скорость.
- «переносная» скорость.
Итак, абсолютная скорость равна геометрической сумме относительной и переносной скоростей.